 fNIRS作為閉環神經反饋系統其可靠性若何?
fNIRS作為閉環神經反饋系統其可靠性若何?

fNIRS 在神經康復中的傳統應用
fNIRS(功能性近紅外光譜)作為一種非侵入性腦功能成像技術,在神經康復中具有三大核心優勢:無電磁干擾(可與機器人設備同時使用)、身體限制小(患者可自由移動)、操作簡便且成本較低。這些特點使其特別適用于康復環境中的長期腦活動監測。傳統上,fNIRS 被廣泛用于評估中風患者康復過程中的腦功能變化,例如在執行手部抓握、手指敲擊等精細運動任務時,通過測量運動皮層中氧合血紅蛋白(HbO)和脫氧血紅蛋白(HbR)的濃度變化來反映神經激活狀態。如圖1所示,典型的fNIRS康復實驗設置包括視覺任務界面、定制化康復機器人系統與fNIRS腦成像設備,探頭通常布置在左半球運動皮層(涵蓋PMC、SMA與M1區),通過實時監測HbO/HbR信號,為康復訓練提供神經反饋,從而個性化調整訓練參數,提升患者參與度與康復效率。
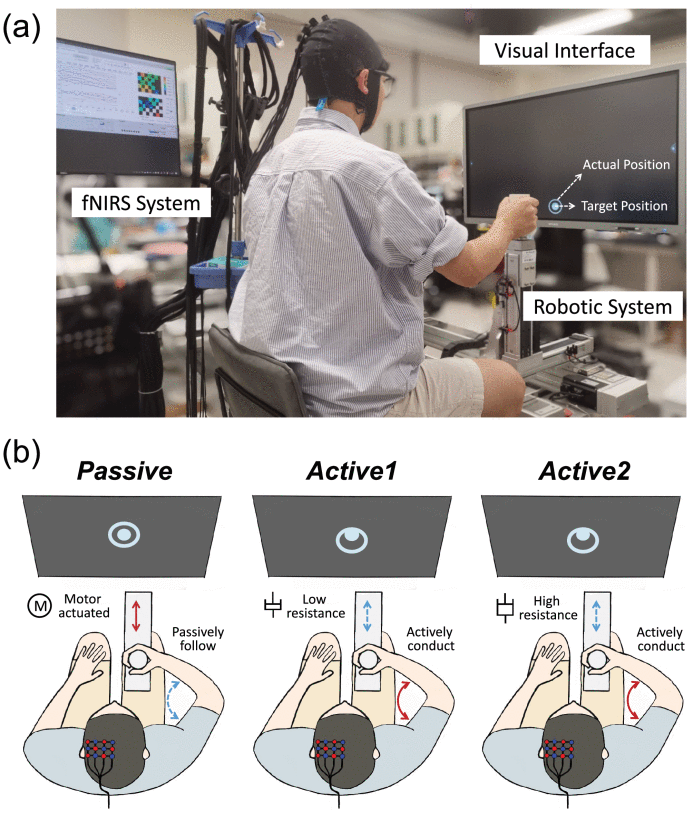
圖1: 實驗設置與任務模式示意圖
圖1清晰地展示了整個研究的實驗平臺和任務設計。圖1(a)為系統集成圖,包含了三個核心部分:提供視覺引導的界面、定制化的上肢康復機器人(帶力傳感器)以及fNIRS腦成像系統(佩戴于被試頭部)。這體現了多模態康復評估系統的典型配置。圖1(b)為任務模式圖解,直觀地比較了三種機器人輔助模式:
Passive模式:機器人完全驅動,用戶無需主動發力,代表低強度訓練。
Active1模式:用戶需主動運動以克服1.0 N·s/cm的阻力,使空心圓(實際位置)跟隨實心圓(目標位置),代表中強度訓練。
Active2模式:與Active1類似,但阻力增大至3.3 N·s/cm,代表高強度訓練。
HUIYING
fNIRS 跨會話可靠性概述
跨會話可靠性是指fNIRS在不同時間點的測量結果是否一致,這對于長期康復療效評估至關重要。傳統fNIRS研究多集中于非運動任務(如視覺/聽覺刺激)或精細運動任務(如手指對抗),這些場景下fNIRS已顯示出良好的跨會話可靠性(ICC最高達0.84)。然而,在機器人輔助康復這類涉及粗大運動且訓練參數多變的環境中,跨會話可靠性的驗證仍顯不足。為了將fNIRS適配于這類場景,需確保探頭布置的標準化與信號處理的魯棒性。例如,圖2展示了通過fOLD工具箱 與蒙特卡洛模擬優化的探頭排列,確保通道覆蓋左半球運動關鍵區域,并通過敏感性剖面圖驗證其測量有效性,從而在不同會話中保持信號捕獲的一致性。
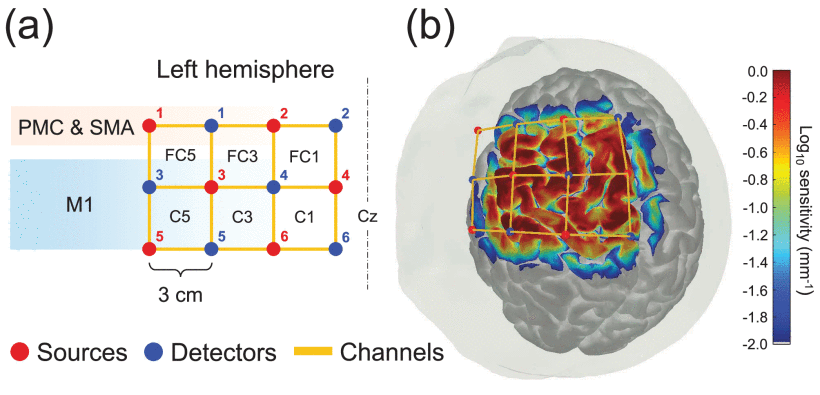
圖2: fNIRS通道布置與腦區敏感性剖面圖
圖2展示了fNIRS的探頭布局及其對目標腦區的測量能力。圖2(a)顯示了根據10-5國際系統在頭皮表面布置的6個光源和6個探測器,形成了17個測量通道(探頭間距3cm),覆蓋了左側半球的運動前區、輔助運動區和初級運動區。圖2(b)通過蒙特卡洛模擬生成的敏感性剖面圖,以熱力圖形式直觀地證明了上述通道安排能夠有效地探測到目標腦區(尤其是初級運動皮層)的血液動力學響應。這為后續觀測到的可靠腦激活提供了技術可信度。fOLD負責“戰略部署”,告訴我們在哪里布陣;而蒙特卡洛模擬負責“戰術驗證”,確認我們的陣型能有效打擊目標,并剔除那些“火力”不足的單元(通道)。
HUIYING
臨床研究
方法
本研究采用了一項基于健康受試者的實驗性臨床研究方法,旨在系統評估fNIRS在機器人輔助上肢粗大運動訓練中的會話內可靠性。十名右利手參與者在定制康復機器人上執行右肘伸展-屈曲任務,依次經歷完全被動、低阻力主動和高阻力主動三種模式,以模擬臨床康復中不同強度的訓練階段。整個實驗會話包含三個相同的運行塊,其間設有充分休息。采用經fOLD工具箱優化設計、并通過蒙特卡洛模擬驗證的fNIRS探頭排布,確保信號精準采集自左側運動皮層。隨后,對獲取的原始光信號進行預處理并轉換為血紅蛋白濃度變化,采用自回歸迭代穩健最小二乘法模型估計血液動力學響應函數,最終通過計算組內相關系數、決定系數及空間重疊度等指標,綜合評估其時間和空間維度的會話內可靠性。
參與者:10名健康成人,執行機器人輔助右肘伸展-屈曲任務。
訓練模式:
Passive:全機器人驅動
Active1:低阻力主動運動
Active2:高阻力主動運動
fNIRS采集:24源-24探測器系統,17通道覆蓋左運動皮層,采樣率10.4 Hz。
數據分析:
預處理(去噪、濾波、HRF估計)
可靠性評估:
空間可靠性:R2(圖4散點圖)與R_overlap
時間可靠性:ICC(圖5雷達圖)評估5類時間特征
結果
原始數據質量:SCI與PP值均超閾值(圖3),表明信號質量良好且運行間無差異。
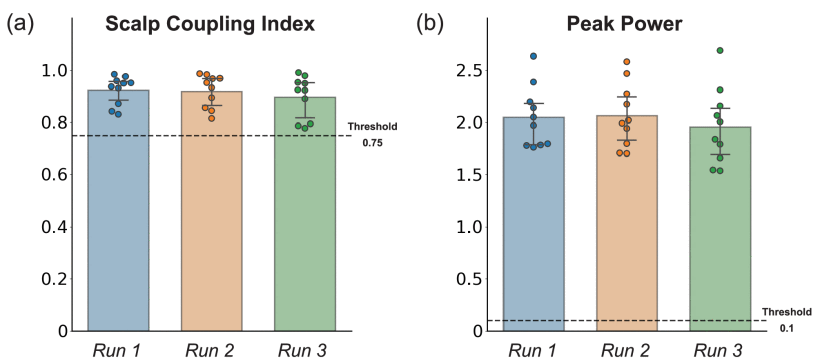
圖3: 各運行間原始信號質量指標對比圖
圖3通過頭皮耦合指數(SCI) 和峰值功率(PP)兩個指標,評估了三個運行中原始fNIRS信號的質量。結果顯示,所有運行的SCI平均值(~0.92)和PP平均值(~2.03)都遠高于公認的閾值(SCI>0.75, PP>0.1)。更重要的是,單因素方差分析表明三個運行之間的信號質量沒有顯著差異。
空間可靠性(圖4):
組水平優秀(R2 > 0.75,R_overlap > 0.75)
個體水平公平至良好(R2: 0.44–0.69,R_overlap: 0.44–0.68)
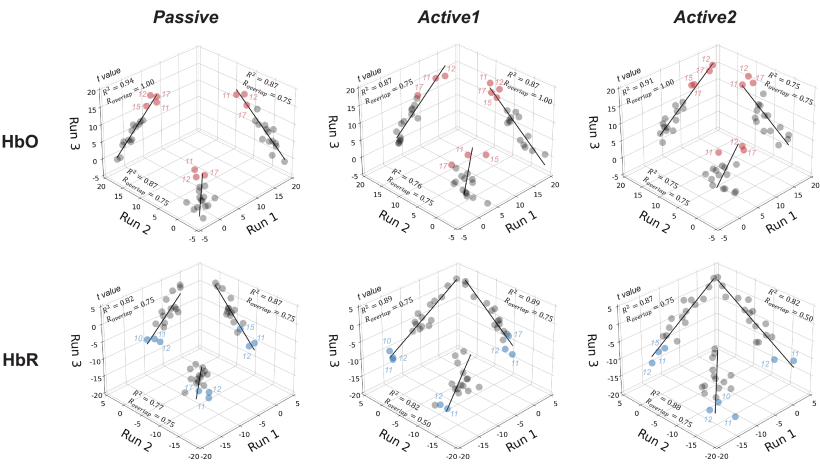
圖4: 組水平空間可靠性評估散點圖
圖4通過三維散點圖評估了組水平的空間可靠性。每個點代表一個通道在兩個運行中的T值。可以看出:所有數據點都緊密分布在對角線(y=x)附近,表明不同運行間各通道的激活強度高度一致。決定系數R2 > 0.75,說明一個運行的激活模式可以很好地預測另一個運行的激活模式,即組水平的圖譜間可靠性極佳。重疊度R_overlap 值很高(HbO: 0.75-1.00; HbR: 0.50-0.75),表明最活躍的通道(圖中標紅的Top 4通道)在不同運行間高度可重復。
時間可靠性(圖5):
Slope、Max/Min、Mean 在多數模式下ICC為0.60–0.86(良好至優秀)
但在Active2模式下HbO可靠性下降(ICC: 0.36–0.41),可能與疲勞有關
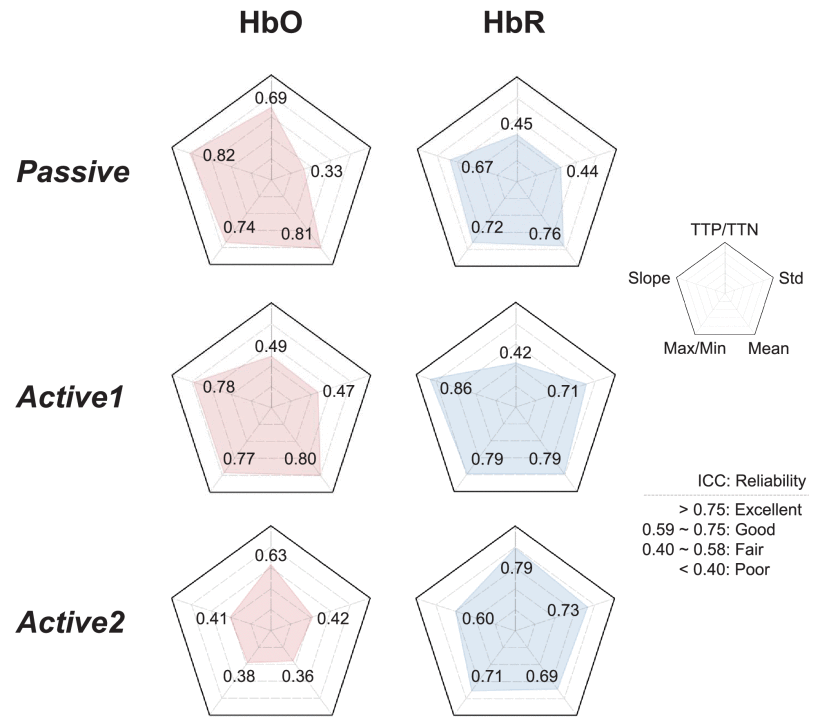
圖5: 各時間特征的會話內時間可靠性雷達圖
圖5使用雷達圖綜合展示了五個關鍵時間特征(TTP/TTN, Slope, Max/Min, Mean, Std)在三種模式下的組內相關系數(ICC),即時間可靠性。可靠性等級:在Passive和Active1模式下,Slope, Max/Min, Mean 三個特征的ICC普遍在0.60-0.86之間,達到良好至優秀水平。模式差異:Active2模式下的HbO可靠性顯著降低(ICC<0.41),而HbR的可靠性依然良好。特征差異:TTP/TTN和Std的可靠性普遍較低,表明這些特征在不同運行間的一致性較差。
激活模式:左M1背側區域激活最強(圖6),且隨訓練強度增加而增強。
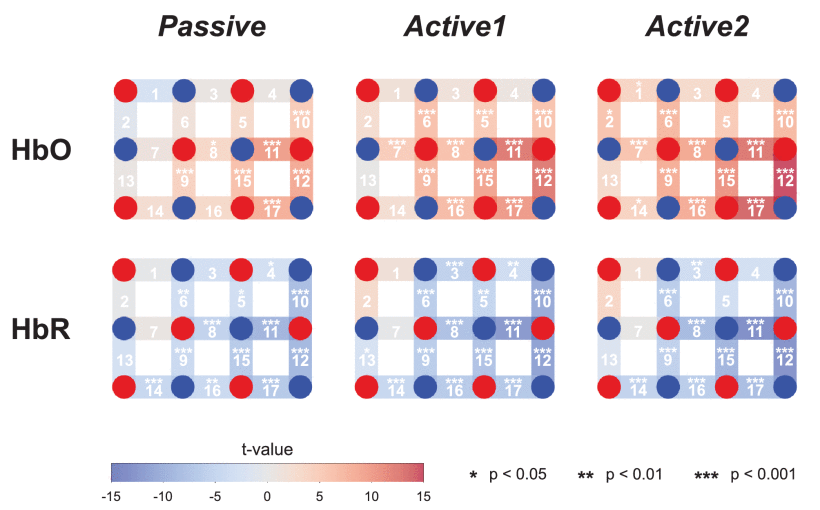
圖6: 不同訓練模式下的組水平腦激活T圖
圖6以T統計值地形圖的形式,展示了在三種訓練模式下,組水平上HbO和HbR的腦激活空間模式。可以清晰地觀察到:激活區域:最顯著的激活集中在左半球初級運動皮層的背側區域(如通道#11,#12,#17)。模式效應:主動模式(Active1, Active2)的激活強度顯著高于被動模式(Passive),表現為T值的絕對值更大。強度梯度:激活強度基本遵循 Passive < Active1 < Active2 的梯度,表明fNIRS信號對訓練強度敏感。
HUIYING
總結
本研究系統驗證了fNIRS在機器人輔助上肢粗大運動訓練中的會話內可靠性。結果表明:
fNIRS在個體水平具有公平至良好的空間可靠性與良好至優秀的時間可靠性;
可靠性隨訓練強度提升而增強(Passive < Active1 < Active2),但在高強度模式下HbO可靠性可能因疲勞而下降;
左M1背側區域為最可靠測量區域,支持少數通道布置的臨床可行性。
這些發現為fNIRS作為閉環神經反饋系統的核心組件提供了實證基礎,推動了其在個性化、自適應康復機器人系統中的實際應用。未來需在患者群體中進一步驗證,并優化休息策略以減輕疲勞影響。補充:基于本研究驗證的fNIRS會話內可靠性,可構建一個精簡的閉環神經反饋系統:該系統通過置于患者運動皮層的少數fNIRS通道,實時提取并分析血紅蛋白濃度變化的斜率與幅值等可靠時間特征;據此,系統實時判斷患者的大腦參與度,并動態控制康復機器人自動調節輔助力度或運動阻力——在參與度充足時增加挑戰,不足時則降低難度,從而形成一個以患者大腦狀態為核心的自適應訓練循環,實現個性化康復。
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
醫療電子
+關注
關注
30文章
1439瀏覽量
92150
發布評論請先 登錄
可靠性是什么?
電源作為系統核心,如何保證其可靠性?
電源作為系統核心,如何保證其可靠性?
【轉帖】電源作為系統核心, 如何保證其可靠性?
電源作為系統核心,如何保證其可靠性?
高頻開關電源雙閉環反饋并聯系統
單片機應用系統的可靠性與可靠性設計

閉環負反饋系統設計原理




 工商網監
工商網監
評論