 碳化硅逆變器加速電動汽車傳動系統開發
碳化硅逆變器加速電動汽車傳動系統開發

| 作者 : Matthias Braband 博士,eMoveUs GmbH
“我們開發了一款 800 伏的碳化硅逆變器,它能夠為汽車牽引傳動應用提供高達 600 千瓦的峰值功率。在這一開發過程中,我們所采用的工作流和工具鏈方法得到了充分驗證。參與 MathWorks 初創企業計劃幫助我們縮短了該產品的上市時間,同時控制了成本,這對幾乎所有初創企業來說都是至關重要的。”
---- Matthias Braband 博士,eMoveUs GmbH
在整個電動汽車 (EV) 及電動出行行業,負責電動傳動系統開發的工程團隊面臨著許多共同的挑戰。這些挑戰不僅在于產品本身的復雜性日益增加,更在于需要在控制成本、并確保開發流程符合 ASPICE、ISO 26262 等標準的同時,以更快的速度交付高質量的產品。
為了應對這些挑戰,我們在 eMoveUs 迎來了一個職業生涯中千載難逢的機遇:我們可以將員工們在電動出行領域的深厚經驗,與從零開始創辦一家新公司的契機完美結合。我們建立了一個精益開發流程,并采用了一致的工具鏈來解決我們在使用以前方法時發現的缺點。
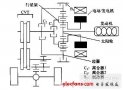
在對各種可用方案進行全面評估之后,我們采用了一套新的工作流程。該流程將基于模型的系統工程 (MBSE) 與基于模型的設計相結合,并集成使用了 MATLAB 和 Simulink 產品以及 Polarion 應用生命周期管理 (ALM) 軟件。圖 1 展示了 ASPICE 的系統工程過程。該工作流程已在多個方面具有經過驗證的優勢。它使我們能夠基于單一數據源進行工作,并在不同學科和go工程之間實現工作產品的充分復用。此外,它使我們的工程師能夠專注于功能開發而不是滿足過程要求,同時建立從需求到架構、模型、代碼和測試的可追溯性。重要的是,它還使我們能夠將“流程前置”范式應用于系統工程,從而可以在系統層面分析動態系統行為,特別是在整個流程的早期識別規范錯誤。

圖 1. eMoveUs 系統開發工作流概述,包括項目管理、軟件工程、硬件工程、機械工程和電磁體設計接口。
使用 System Composer 進行系統架構建模
在傳統的產品開發流程中,系統規范中的錯誤通常要等到原型機問世,并依據系統規范進行測試時才能被首次發現。這通常會導致高昂的錯誤修正成本,并在一定程度上造成嚴重的項目延誤。為了避免在系統層面因規范錯誤而產生這些額外的、不可預測的成本,我們的目標是在流程中盡早地驗證規范的正確性。在我們的工作流程中,我們使用 System Composer 來定義可仿真的系統架構。這使我們能夠將測試和驗證活動“流程前置”,并通過 CI 管道實現自動化,如圖 1所示。
此外,我們在 System Composer 和 Simulink 中,維持了系統組件與其對應的軟件架構組件之間的一對一映射關系,從而可以在系統層面分析動態行為。因此,軟件工程師可以將系統級的行為模型用作草稿。在 Simulink 中為軟件生產開發詳細設計時,他們不僅可以復用接口,還可以將系統架構中定義的行為模型作為起點。另外,跨部門的模型和環境復用率也很高。例如,系統、硬件和軟件部門使用相同的被控對象模型進行閉環仿真和測試,并且能夠直接在我們的 Speedgoat HIL 系統上實時運行。描述這種依賴關系的示意圖請參見圖 2。
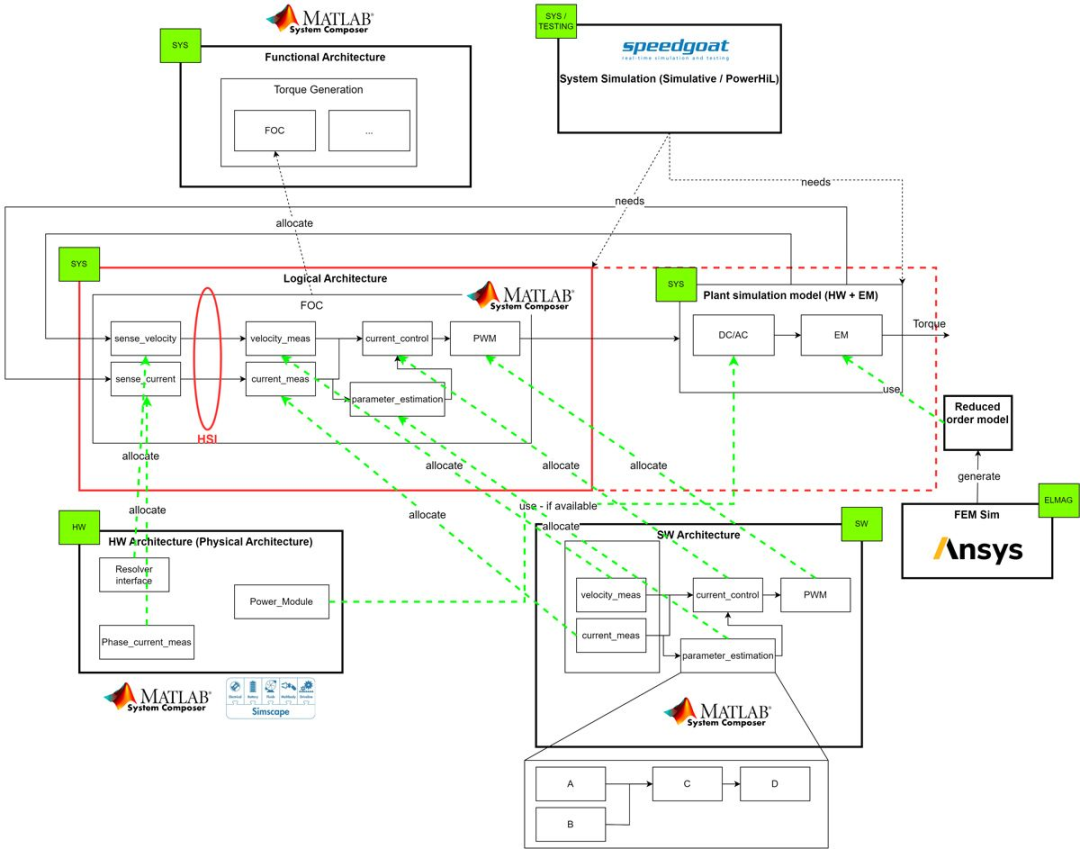
圖 2. 使用 System Composer 建模的功能、邏輯、硬件(物理)和軟件架構,并與被控對象模型結合,實現系統級閉環仿真。
此外,我們使用 Requirements Toolbox 和 Polarion Connector for Simulink,將 Polarion 中管理的需求與 System Composer 模型中定義的架構元素關聯起來。我們還使用該連接器,將軟件實現所用的 Simulink 模型內部的詳細設計元素也鏈接起來。這種配置實現了在規范和實現之間的雙向可追溯性(且無需手動同步),促進了跨學科團隊之間的協作,并有助于確保整個開發周期的一致性。
使用 Simscape 進行物理建模
要在系統、軟件或硬件層面進行閉環仿真,就需要一個電動汽車動力總成的物理模型。我們使用 Simscape 和 Simscape Electrical 創建了該模型,其高層視圖如圖 3 所示。該多域模型包括用于傳動系統電池、直流電纜、電磁干擾 (EMI) 濾波器、逆變器、交流母排、電驅動、負載模型和冷卻的模塊化組件。在該模型中,我們還可以集成來自 Ansys Maxwell 等 CAE 工具的、用于仿真熱效應和電磁效應的降階模型,以保證達到預期的仿真速度。
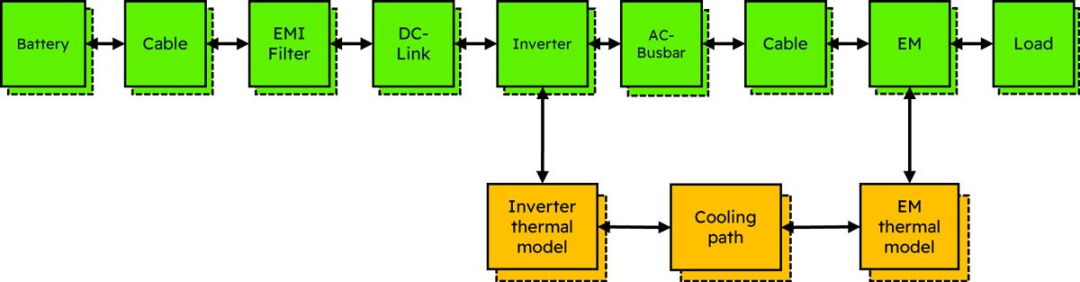
圖 3. 電動汽車動力總成的模塊化被控對象模型。
為了能讓工程師能夠為當前仿真用例中的任意組件選擇保真度級別,我們使用模型變體實現了一套變體管理系統。例如,團隊可以使用 Variant Manager for Simulink 選擇一個將電池建模為簡單恒壓源的變體模塊,以進行基本仿真。之后,他們可能會切換到電池的 RC 或 RL 電路變體,以分別研究其低頻電容行為或高頻電感行為。同樣地,我們的工程師可能會為逆變器選擇一個簡單的受控電壓源變體來加快仿真速度,或者選擇一個具有真實開關行為的更高保真度變體來評估 PWM 效應。圖 4 展示了在變體管理器中處理這些變體的示例。
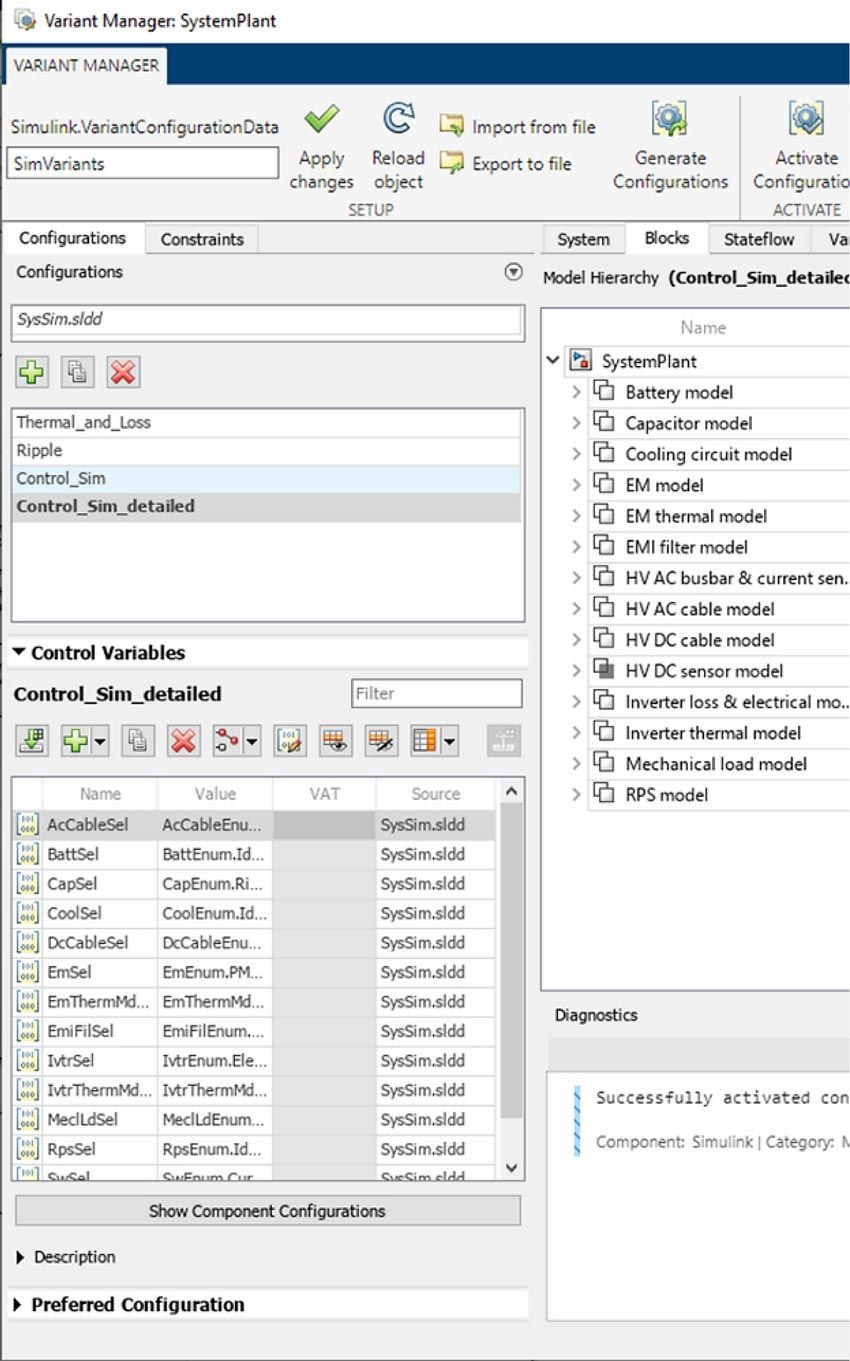
圖 4. Variant Manager for Simulink。
閉環模擬、代碼生成與實時 HIL 測試
當我們在 System Composer 中規劃好系統架構,并且詳細的被控對象模型也準備就緒后,我們便可以在多個層級上進行閉環仿真。具體而言,我們可以使用 Simulink 中的系統行為模型、軟件架構模型或詳細設計模型來進行這些仿真,如圖 5 所示。

圖 5. 用于在系統架構級別運行閉環仿真的仿真環境。
它使我們能夠將已在系統層面進行的驗證活動“流程前置”,從而最大限度地減少復雜驅動系統功能中的規范錯誤。
在這個環境中,我們能夠使用 MATLAB 及其數據檢查器,在系統層面分析產品行為,并對信號、性能指標和時序關系進行可視化。圖 6 展示了一個系統架構的閉環仿真結果的示例,該仿真用于分析磁場定向控制器的電流控制行為。使用 Simulink Test,我們可以在系統層面或針對特定的架構組件,在這種閉環設置中執行自動化測試。此外,這些測試結果會自動同步回 Polarion,以便根據測試用例規范進行最新的項目跟蹤和報告。
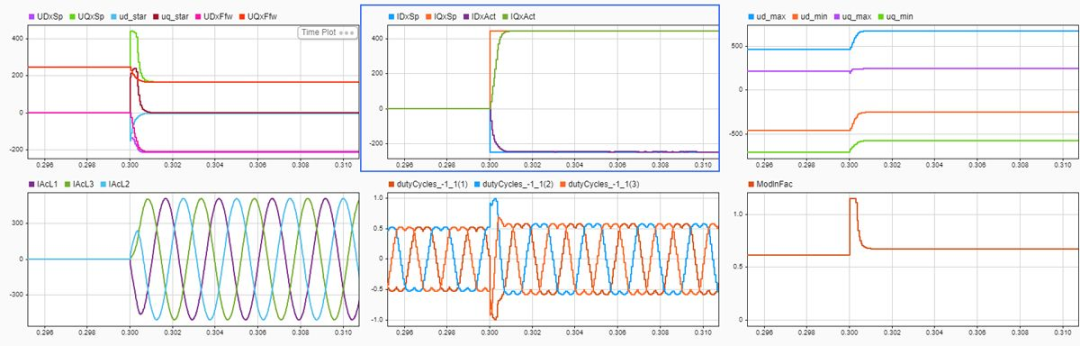
圖 6. 永磁同步電機的閉環
電流控制分析結果。該電機采用了可仿真系統架構和模塊化電機模型。
這種一致性的開發方法并不會止步于領域邊界,而是會進一步延續。 隨著我們在 V 周期中不斷推進,從系統規范進展到軟件規范、架構、基于模型的設計和實現,我們工作流程的下一階段就
包括了代碼生成以及 MIL、PIL 和 HIL 測試。在這一階段,我們使用 Embedded Coder 從 Simulink 中的軟件架構或詳細設計模型生成代碼,將其集成到 AUTOSAR 協議棧中,并部署到英飛凌 AURIX TC3xx 微控制器上。然后,前面介紹過的受控對象模型,會通過 HDL Coder 和 Simulink Real-Time 部署到 Speedgoat 實時目標機上的 FPGA 中。這種配置能夠在 HIL 上驗證最終產品的正確軟件行為。此外,為了利用協同效應并降低設備和開發成本,同一個 HIL 平臺也會在最終的臺架測試完成之前,用于執行系統集成和驗證測試。
已實現的效益和持續的集成改進
我們開發了一款 800 伏的碳化硅逆變器,它能夠為汽車牽引驅動應用提供高達 600 千瓦的峰值功率。在這一開發過程中,我們所采用的工作流程和工具鏈方法得到了充分驗證。參與 MathWorks 初創公司計劃幫助我們縮短了該產品的上市時間,同時控制了成本,這對于幾乎所有初創公司而言都是至關重要的。
我們正在持續擴展和改進我們的工作流程。例如,我們已經將 CI 與 Jenkins 和 Bitbucket 結合使用,以持續執行軟件單元、集成和驗證測試。我們還致力于將這種基于 CI 的自動化工作流程進一步向上延伸至 V 周期的更前端,以實現對我們系統架構的、基于 CI 的自動化驗證。
-
電動汽車
+關注
關注
156文章
12625瀏覽量
236975 -
matlab
+關注
關注
189文章
3027瀏覽量
238843 -
逆變器
+關注
關注
304文章
5176瀏覽量
216842 -
碳化硅
+關注
關注
26文章
3482瀏覽量
52450
原文標題:加速電動傳動系統開發 | 結合基于模型的系統工程(MBSE) 和基于模型的設計(MBD)
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄



 工商網監
工商網監
評論