 南京大學:降耗100倍!,研發非接觸感知顛覆機器人觸覺,識別準確率超90%
南京大學:降耗100倍!,研發非接觸感知顛覆機器人觸覺,識別準確率超90%

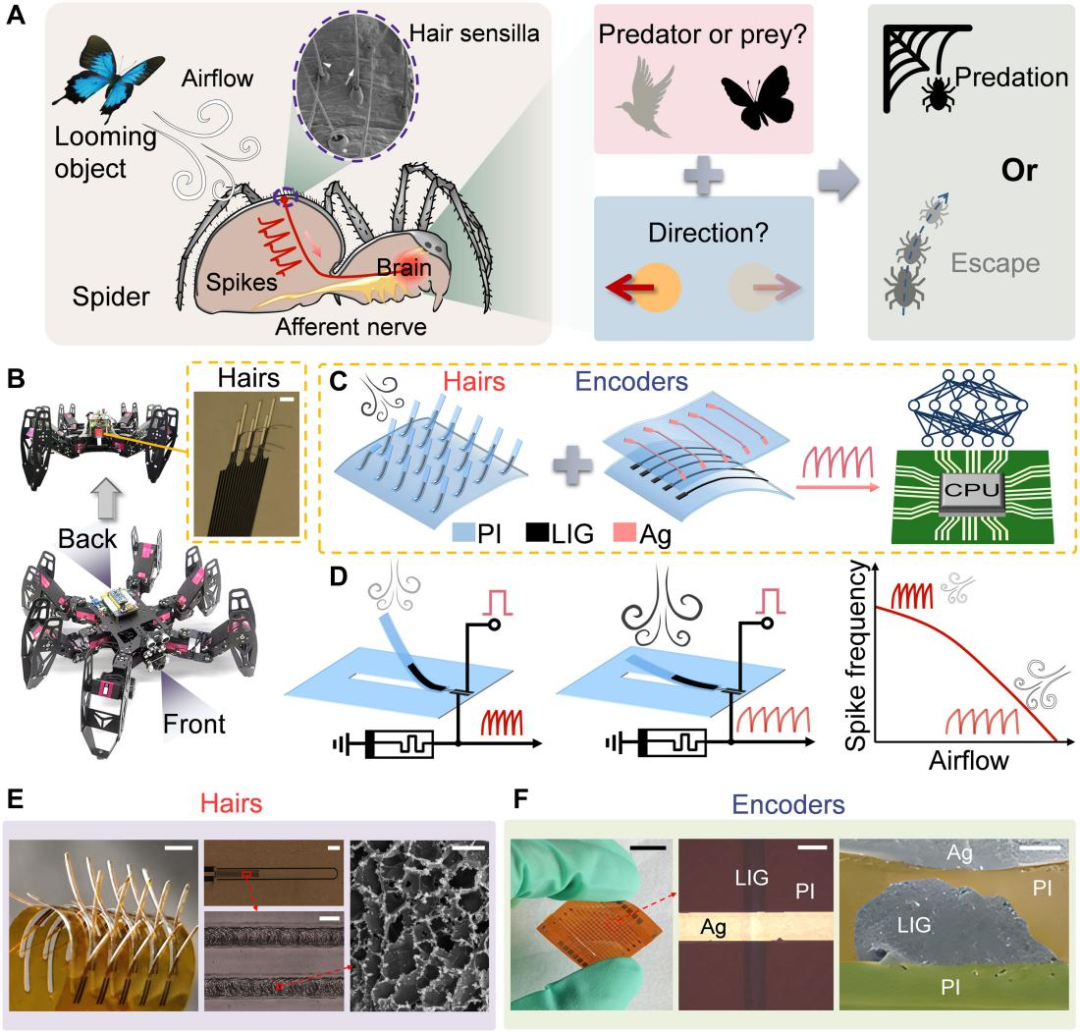
在自然界中,生物體為了生存,演化出了各式各樣的感知能力。其中,非接觸式感知——即無需直接觸碰便能探測環境變化和潛在威脅的能力,在許多動物的生存策略中扮演著關鍵角色。
在眾多非接觸式感知方式中,人類最為依靠的視覺擁有最高的分辨率,卻也伴隨著最高的能耗,消耗了大腦超過40%的感知處理能量。與視覺系統相比,蜘蛛選擇了一條不同的演化路徑。它們的光感受器密度比哺乳動物低20倍,但全身卻覆蓋著極高密度的毛狀感受器,每平方毫米可達400根。這些毛狀感受器能夠將外界非接觸刺激(如獵物引起的氣流)轉換為神經脈沖序列,每次事件消耗的能量低于100pJ,能量密度比視覺系統低數百倍。這種策略實現了廣域感官覆蓋,同時將能耗降至最低,并克服了視覺感知的諸多限制。此類高效而節能的感知方式,正為現代機器人技術與人工智能感知系統帶來深遠啟示。
近日,南京大學研究團隊受此啟發,提出了一種柔性脈沖毛發感受器(FISH),仿照蜘蛛毛感受器,能夠將氣流信號實時轉化為電脈沖,從而實現非接觸式感知。其功率密度低于100 nW/cm2,每個感知事件的能耗約為660 pJ,與蜘蛛毛感受器幾乎相當,比傳統非接觸傳感器的能耗低了兩個數量級。
▍柔性脈沖毛發感受器(FISH)的結構特點
那么,這一超低功耗的傳感器是如何實現的呢?研究團隊的核心設計在于其獨特的結構。這款名為柔性脈沖毛發感受器(FISH)”新型傳感器,是由基于聚酰亞胺(PI)的毛發狀傳感器和基于Ag/PI/LIG/PI 的柔性 TS憶阻器組成,能夠將氣流信息轉換為用于非接觸感知的脈沖序列。
FISH的概念設計和結構特征
毛發狀傳感器:仿生設計的精髓
FISH的毛發狀傳感器采用激光誘導石墨烯(LIG)技術,在聚酰亞胺基底上制作出寬度僅約25微米的傳感元件。掃描電子顯微鏡顯示,LIG呈現泡沫狀多孔結構,這種結構不僅增強了傳感器的響應靈敏度,還保證了良好的柔韌性。
該傳感器能夠檢測低至0.4米/秒的氣流速度,通過調整PI基底厚度,甚至可實現0.04米/秒的最低檢測限。在7.0米/秒的氣流速度下,傳感器的響應和恢復時間分別僅為約40毫秒和26毫秒。經過4500次循環測試,傳感器仍保持穩定性能,顯示出優異的可靠性。

毛發狀傳感器的電氣特性
柔性TS憶阻器:脈沖編碼的核心
柔性TS憶阻器是FISH實現脈沖編碼的關鍵。它展現出典型的突觸行為:當施加的電壓超過閾值時,器件從高阻狀態切換到低阻狀態;當電壓低于保持電壓時,又自發返回高阻狀態。這種特性使得憶阻器能夠在電流偏置下產生自激振蕩,輸出頻率可調的電壓尖峰。
該憶阻器表現出卓越的穩定性:經過1000次重復循環,高阻態和低阻態的變異系數分別僅為7.71%和10.71%;在不同彎曲半徑(3-20毫米)和溫度條件(40-200°C)下均保持穩定工作。當輸入電流從100皮安增加到200納安時,尖峰頻率可從155赫茲提升至2650赫茲。

柔性TS憶阻器的電氣特性
協同工作:從氣流到脈沖序列
當FISH檢測到氣流或接觸刺激時,毛發狀傳感器的電阻發生變化,從而改變流過TS憶阻器的電流。這一變化觸發憶阻器的自激振蕩特性,將傳感信息編碼為頻率可調的脈沖序列。在2.4伏偏置電壓下,FISH產生的尖峰頻率約為500至1500赫茲,功耗僅約600納瓦,每次事件的能量消耗約為660 pJ,非常接近蜘蛛機械感受器的能耗水平。
最重要的是,FISH的功率密度低于100納瓦/平方毫米,比已報道的非接觸式傳感設備至少低100倍,為實現大規模傳感器陣列提供了可能。

FISH 的刺突編碼行為
▍基于FISH矩陣和脈沖神經網絡,構建完整非接觸觸覺感知系統
研究團隊進一步結合FISH矩陣與脈沖神經網絡(SNN),構建了一套完整的非接觸觸覺感知(NCTP)系統,這一系統模仿生物感覺處理中的兩種關鍵機制:群體編碼和感受野整合。
群體編碼:單根FISH 僅能感知 “有氣流”,但 25 根 FISH 協同工作,就能捕捉氣流的 “空間分布”—— 比如蝴蝶形狀的氣流模板,會讓不同位置的 FISH 產生不同頻率的脈沖,共同構成蝴蝶的脈沖圖像。

基于NCTP系統實現氣流介導的非接觸式識別
感受野整合:每根FISH 負責一個 “小區域” 的感知,SNN 會把這些小區域的信號整合起來,分析出目標的 “類型”(比如是蝴蝶還是飛蛾)和 “方向”(從左邊來還是右邊來)。
研究團隊構建了一個包含10個標簽的自定義數據集,代表五種不同的模式類型和兩種方向條件。經過70個訓練周期后,脈沖神經網絡對這些非接觸目標的多維識別準確率超過92%。這表明,通過FISH矩陣的群體編碼,系統能夠有效提取關于氣流模式和方向的多維信息。
▍NCTP 增強型蜘蛛機器人的集成與場景驗證
為驗證NCTP系統的實際性能,研究團隊將2×3 FISH矩陣集成到蜘蛛機器人中。機器人的前端配備商用數碼相機用于視覺感知,后端則安裝FISH矩陣用于非接觸觸覺感知。

NCTP增強型蜘蛛機器人的演示
在五個不同的實驗場景中,蜘蛛機器人展示了對視覺和非接觸觸覺刺激的智能響應:
在黑暗環境中,視覺系統失效,機器人保持靜止;在光照條件下,視覺系統檢測到前方獵物,機器人發起攻擊;無論光照條件如何,當氣流表明獵物位于機器人后方時,FISH矩陣觸發機器人轉身并攻擊;當檢測到后方捕食者氣流模式時,機器人迅速向安全方向逃跑。
這些實驗證明,NCTP系統能夠有效擴展機器人的環境感知能力,克服視覺感知在黑暗、低能見度或盲區條件下的限制。
來源:ACs期刊資訊
-
機器人
+關注
關注
213文章
31147瀏覽量
222651 -
觸覺傳感
+關注
關注
0文章
18瀏覽量
8387
發布評論請先 登錄
清華大學深圳國際研究生院:研發“鴿眼”傳感器,讓機器人感知逼近人類!

【“芯”篇章】中星聯華走進高校系列-南京大學站

RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
概倫電子中標南京大學半導體電子測量系統項目
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
易靈思與南京大學集成電路學院暑期課程圓滿結課
思爾芯攜手南京大學開展暑期協同課程,產教融合共育集成電路英才

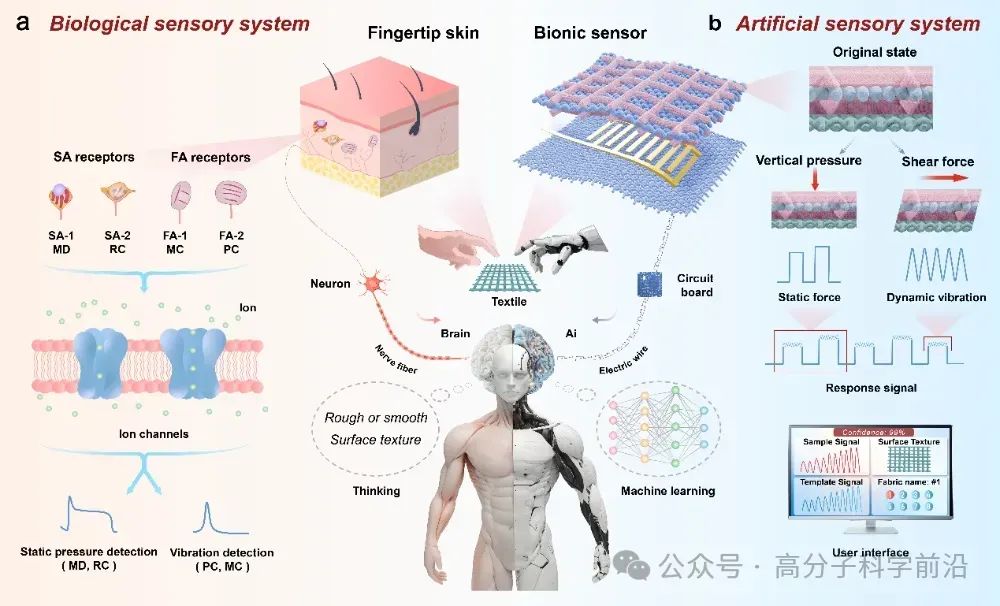
南京工業大學:仿生觸覺傳感系統讓機器人擁有“人類指尖”般的細膩感知
明遠智睿SSD2351開發板:語音機器人領域的變革力量
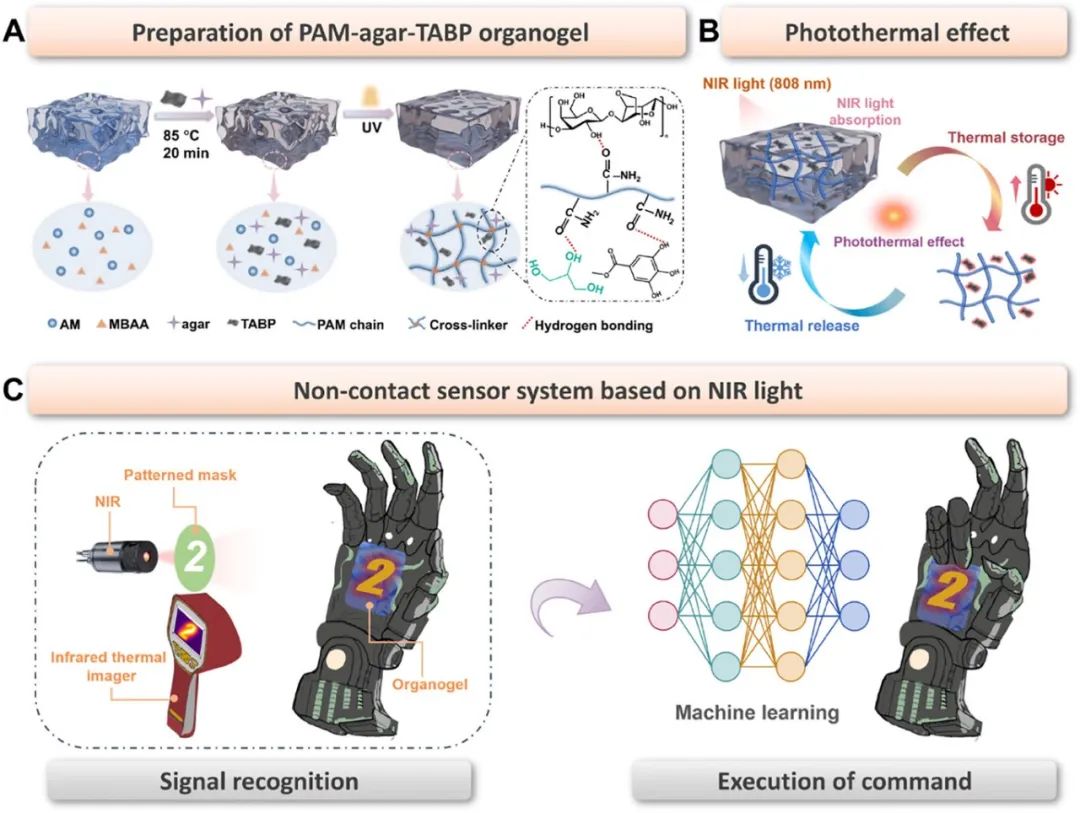
基于近紅外光的機器人非接觸式傳感系統
詳細介紹機場智能指路機器人的工作原理
南京大學OpenHarmony技術俱樂部正式揭牌成立



 工商網監
工商網監
評論