 基于碰撞緩解的自動駕駛控制設計
基于碰撞緩解的自動駕駛控制設計

摘要 -本文介紹了一種路徑規劃方法,尤其是當碰撞不可避免時,通過產生盡可能減輕碰撞的軌跡。這里采用模型預測控制算法進行路徑規劃。為避免障礙物的產生,并減輕不可避免的碰撞,在控制目標中加入了描述障礙物和潛在碰撞嚴重程度的人工勢場。車輛動態也被認為是最佳控制目標。基于以上分析,模型預測控制器可以保證指令的跟隨、避障、車輛動態,并減輕不可避免的碰撞。仿真結果驗證了所提出的MPC具有避障和減輕不可避免的碰撞的能力。
作者:Hong Wang, Yanjun Huang*, Amir Khajepour, Teng Liu, Yechen Qin,Yubiao Zhang
索引術語—碰撞緩解、潛在碰撞嚴重性、自動駕駛車輛、路徑規劃、MPC、安全性
I.介紹
交通事故是世界上最危險的殺手,統計數據顯示,每年世界上有數百萬人在車輛的車輪下喪生。先進的駕駛輔助系統(ADAS),例如巡航控制,自適應巡航控制(ACC)和應用于高速公路駕駛和自動停車的協同ACC,應用于城市環境的盲角車輛檢測,顯著提高了安全性[1]。道路上的完全自動駕駛車輛(AV),無需人為干預,可以顯著減少因駕駛員的錯誤、疲勞和醉酒駕駛引起的事故。完全避免交通事故仍然是不現實的,在不可避免的事故情況下,確定如何生成碰撞嚴重程度最低的路徑是一個需要研究和解決的挑戰。
根據車輛事故調查[2],大多數事故現場可分為以下幾類:前方車輛突然轉彎或改變其車道而不顯示轉向信號;前車突然剎車;障礙物從前面的車輛上掉下來;與行人碰撞或與道路上的靜態車碰撞。事故造成的損害取決于障礙物的性質(行人,汽車或道路邊界等)、碰撞速度及其配置[3]。對于汽車碰撞,碰撞主要取決于碰撞速度、碰撞方向[4]、車輛不匹配[5]、駕駛員的特征(如性別,年齡和體重[6]),汽車大小[ 7],以及車輛安全裝置[8]。
在過去的幾十年里,路徑規劃研究一直是一個熱門話題[15]。路徑規劃采用了許多技術。這些路徑規劃方法可以分為三種:基于圖搜索的規劃器,基于采樣的方法和內插曲線規劃器。在基于圖形搜索的規劃器的范圍內,Dijkstra算法是一種基于圖形搜索的算法,可以在圖形中找到單源最短路徑[16];A *算法是一種基于圖形搜索的算法,由于實現啟發式算法,因而可以實現快速節點搜索[17];并且狀態點陣算法使用具有狀態網格的規劃區域的離散表示[18]。概率路線圖方法(PRM)[19]和快速探索隨機樹(RRT)[20]是基于抽樣的規劃者最常用的方法。插值曲線規劃器實現了路徑平滑和曲線生成的不同技術,例如直線和圓[21],回旋曲線和多項式曲線。
近年來,基于路徑優化的技術已經成為最先進的AV路徑規劃方法,[ 9 ]。這項技術的核心是將路徑規劃問題表述為一個考慮多約束和預期車輛性能的優化問題。模型預測控制(MPC)已被證明非常適合解決路徑規劃問題,因為它們能夠處理多約束和凸問題[10] [22]。此外,MPC以遞歸方式解決路徑優化問題,同時考慮到規劃過程中環境狀態的更新。因此,MPC用于解決本論文中的路徑規劃問題。
據我們所知,碰撞緩解研究仍然是路徑規劃領域研究中的一個空白領域。我們為此合成了一種自動駕駛汽車MPC路徑規劃控制器,該控制器可以避開障礙物并生成一種具有不可避免的碰撞但可將嚴重性降到最低的緊急路徑。在模型預測控制器中,預測碰撞嚴重程度、障礙物和道路邊界的人工勢場、路徑跟蹤矩陣和其他車輛性能約束被考慮到成本函數中。模擬不同的場景以驗證我們提出的控制策略能夠生成既可以避開障礙物又可以減輕碰撞嚴重程度以保持自動車輛的最佳安全性的路徑。
本論文研究了自動駕駛車輛的路徑規劃算法,以便在無法避免碰撞時減輕碰撞嚴重程度。第II節介紹了碰撞緩解路徑規劃的控制設計——包括車輛模型、碰撞嚴重度系數的定義、這里采用的潛在領域代表了路徑規劃的環境和控制設計。第III節介紹了兩個案例研究,以驗證擬議的減速路徑規劃控制策略,然后是第IV節的結論和未來工作。
II.路徑規劃
本節介紹基于碰撞緩解的自動駕駛車輛路徑規劃方法的控制設計。該過程包括車輛建模,嚴重性因子SF的定義,人工勢場的引入和用于路徑規劃的MPC算法。
A.車輛建模
實際上,車輛動力學非常復雜,高保真度模型可能是高度非線性和不連續的。為了設計控制器,使用自行車模型。圖1描繪了具有3個自由度的車輛模型圖,即縱向,橫向和偏航[11]:
圖1.車輛自行車模型
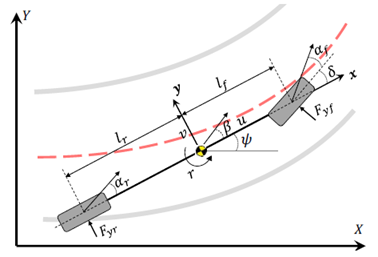
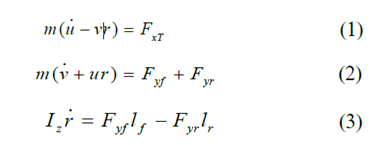
車輛相對于全局坐標的運動:

其中,m表示車輛的總質量, 是車輛的偏航慣性矩;r,u和v分別是CG的橫擺率、縱向的速度和橫向速度。
是車輛的偏航慣性矩;r,u和v分別是CG的橫擺率、縱向的速度和橫向速度。 分別是C.G.到前、后軸的距離。X和Y是縱向和橫向的車輛位置,
分別是C.G.到前、后軸的距離。X和Y是縱向和橫向的車輛位置, 是車輛的航向角,
是車輛的航向角, 和
和 表示后輪胎和前輪胎的力,
表示后輪胎和前輪胎的力, 是縱向輪胎力。
是縱向輪胎力。
具有線性輪胎模型的前輪轉向車輛的橫向輪胎力可以計算為:


其中 是輸入轉向角,
是輸入轉向角, 表示前輪的側滑角,
表示前輪的側滑角, 表示后輪胎的側滑角,
表示后輪胎的側滑角, 和
和 代表前后輪胎的轉彎剛度。
代表前后輪胎的轉彎剛度。
B.潛在碰撞嚴重度指數PCSI的定義
如引言中所述,事故嚴重程度主要取決于碰撞速度,障礙物特征和碰撞配置(與停止的車輛、具有剛性固定障礙物、或與任何其他車輛的正面碰撞)。本文考慮了三個主要因素:碰撞速度,碰撞角度和兩個碰撞車輛的質量比。
1)相對速度ΔV
許多速度相關指標被用來評估潛在的碰撞嚴重度,包括等效速度、能量等效速度、加速度嚴重度指數或乘員碰撞速度。根據美國,英國和澳大利亞的碰撞數據分析,與速度有關的碰撞嚴重程度是ΔV的函數,ΔV是碰撞時之前和之后的車速變化。相反,但本質上相同,在我們的算法中,采用接近速度作為ΔV的定義來測量潛在碰撞嚴重度指數( PCSI ):

其中,ΔV和D分別是接近速度和障礙車輛與自我車輛之間的距離。
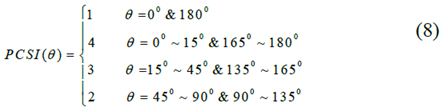
2)相對航向角θ
數據庫分析顯示,最高碰撞風險發生在1/3重疊碰撞中,而等效障礙速度高于20英里/小時[13]。在上述分析的基礎上, 為了便于實現, 我們將自我車輛與車輛障礙物之間的相對角θ定義為每輛車輛的航向角之和。與相對角度θ相關的潛在碰撞嚴重性指數定義如下:
3)質量比Wo / W
就兩輛車墜毀事故的不匹配而言,報告顯示輕型卡車車輛的乘客死亡相對風險比乘用車撞車的風險高3至4倍[7]。關于與兩種車輛的質量比相關的潛在碰撞嚴重性指數,我們可以簡單地將其定義如下[14]:

其中Wo和W分別是障礙車輛和自我車輛的重量。因此,潛在的總碰撞嚴重度指數將是:

其中,A、B和C是潛在碰撞嚴重程度的重量參數,分別與相對速度、相對角度和質量比相關。
C.障礙描述
其中人工勢場(PF)、不可穿越(U)、可穿越(UC)和道路(UR))定義的障礙有三種。勢場可以計算為PF的總和[23]:

其中索引 i,j和q代表不能越過 的障礙,可以跨越的障礙是
的障礙,可以跨越的障礙是 ,
, 表示車道標記。這三種PF的詳細介紹如下:
表示車道標記。這三種PF的詳細介紹如下:
a)不可穿越的障礙物:
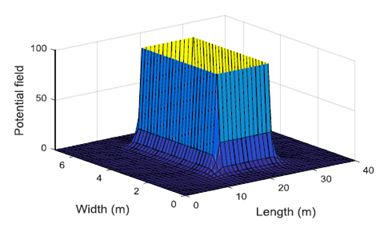
不可穿越的障礙物,如車輛或行人,會造成不穩定、損壞車輛或威脅人們的生命,并且是安全距離SD的函數, [ 12 ]:
[ 12 ]:
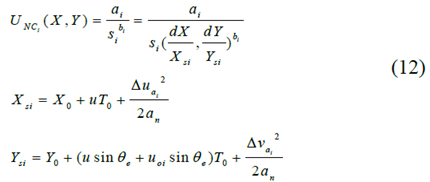
y其中ai和bi分別是PF的形狀和強度參數,Xsi表示與障礙物的縱向安全距離,Ysi是與障礙物的橫向安全距離,Xo和Yo是最小縱向和橫向距離。為了表示安全時間間隙,u表示自我車輛的速度,uoi是障礙物的速度,θe是朝向彼此的航向角。位于( 20m,2m )的不可穿越障礙物的勢場如圖2所示:
圖2.不可穿越障礙物的PF
b )可穿越障礙物:
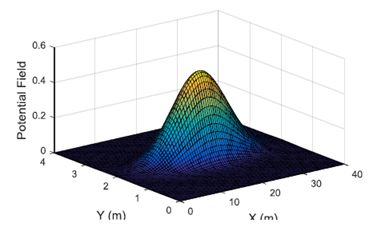
指數函數用于定義某些障礙物的PF,例如道路上的小碰撞或一些軟垃圾不會對自我車輛造成任何損害:

其中aj和bj是障礙物的形狀和強度參數,sj表示類似于計算的障礙物和自我車輛之間的歸一化安全距離(12)。位于( 10m,2m )的可穿越障礙物的勢場如圖3所示。
圖3.可穿越障礙物的PF
c)道路邊界:
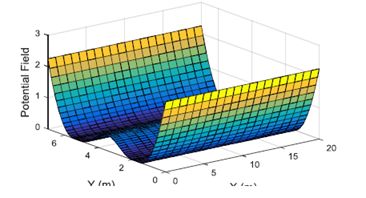
當自我車輛在道路上行駛時,尤其是在高速公路上行駛時,除非駕駛員想要改變車道,否則車輛不能越過道路車道標記。禁止撞擊道路隔離帶,因為它會導致不穩定或嚴重的車禍。為了避免不希望的道路交叉,道路邊界的PF可以定義為:

其中sRq是距離道路邊界的車輛安全距離,Da是距離道路邊界的允許距離,q表示右側或左側的車道標記,aq是強度參數。
利用二次函數來定義車道標記PF,當安全距離減小時,它們的梯度線性增加,如圖4所示。
圖4.道路邊界的PF
D.路徑規劃的控制設計
本節采用模型預測控制算法進行路徑規劃。為了達到避障和最低碰撞嚴重程度的目的,根據目標函數計算出的碰撞嚴重性因子和人工勢場。車輛動態也被認為是最優控制問題。基于上述分析,模型預測控制器可以優化指令跟蹤、避障、車輛動態、道路調節,并利用預測值減輕不可避免的碰撞。
假設路徑規劃模塊接受期望車道、速度、障礙物、道路邊界和車輛狀態的信息。
使用等式( 1 ) - ( 6 ),車輛在全局坐標中的動態可以以狀態空間形式寫成:

其中, 。橫向和縱向速度v,u;車輛的航向角
。橫向和縱向速度v,u;車輛的航向角 和橫擺率r。系統輸入包括縱向輪胎力FxT和轉向角δ。y是包括橫向位置和速度的輸出矩陣。
和橫擺率r。系統輸入包括縱向輪胎力FxT和轉向角δ。y是包括橫向位置和速度的輸出矩陣。
包括所需車道和目標縱向速度的所需輸出矩陣,表示要跟蹤的參考點如下所示:
其中ydes是所需的輸出矩陣,包括所需的車輛橫向位置Ydes和所需的速度udes。ldes是從右側開始計算的所需車道索引號。Lw是車道的寬度。MPC的優點之一是它不僅能夠處理對輸入、狀態和輸出的限制。因此,包括道路規則、致動器容量約束和車輛動態約束在內的約束都被考慮到MPC問題中。
首先,根據道路規定,公路車輛不應違反最高和最低速度的要求。約束可以表示為:

其中umin和umax表示最小和最大允許速度。
此外,致動器容量被認為是:
其中Reff表示車輪的半徑; δmax表示最大轉向角;Tmax是最大推進扭矩; △δ是一步中轉向角的變化率,△δmax是其容量。縱向載荷傳遞效率包含在輪胎力橢圓約束中:

其中FxT_max表示最大總縱向輪胎力。Fyf0_max和Fyr0_max表示標稱最大橫向前后輪胎力。W是車輛的重量, h是C.G.的高度,μ是輪胎 - 路面摩擦系數。成本函數包括勢場U,嚴重性因子SF,所需路徑的跟蹤,控制輸入及其變化以及松弛變量如下所示:
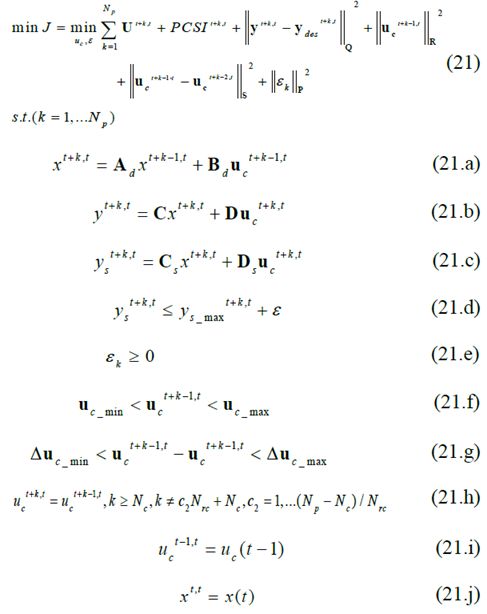
其中t + k表示當前時間t之前的k個步長的預測值。Nc和Np分別表示控制范圍和預測范圍。 是k步的松弛變量向量,表示輪胎力的軟約束的懲罰。目標函數包含潛在字段、碰撞嚴重程度、路徑跟蹤、輸入、輸入變化和松弛變量。其中,路徑跟蹤,輸入,輸入變化和松弛變量分別加權加權矩陣Q,R,S和用P加權的松弛變量的第一范數。通過(21.a)預測州。公式(21.b)生成輸出,其中C是輸出,D是前饋矩陣。在(21.d)中給出了對致動器的約束,車輛速度和輪胎容量約束的相應線性約束,其中ys是軟約束變量向量并且還包括以提供對邊界違反的許可。對應于致動器約束的松弛變量被設置為零,因為它們不能被違反。線性化約束可以作為(21.c)中輸入和狀態的函數寫入,其中Ds和Cs分別表示前饋和輸出矩陣。車速及其違規限制在(21.f)和(21.g)中表示。通過減少(21.h)中的控制輸入數量可以降低計算成本,并且控制輸入在第一個Nc預測步驟之后每Nrc步驟改變一次。
是k步的松弛變量向量,表示輪胎力的軟約束的懲罰。目標函數包含潛在字段、碰撞嚴重程度、路徑跟蹤、輸入、輸入變化和松弛變量。其中,路徑跟蹤,輸入,輸入變化和松弛變量分別加權加權矩陣Q,R,S和用P加權的松弛變量的第一范數。通過(21.a)預測州。公式(21.b)生成輸出,其中C是輸出,D是前饋矩陣。在(21.d)中給出了對致動器的約束,車輛速度和輪胎容量約束的相應線性約束,其中ys是軟約束變量向量并且還包括以提供對邊界違反的許可。對應于致動器約束的松弛變量被設置為零,因為它們不能被違反。線性化約束可以作為(21.c)中輸入和狀態的函數寫入,其中Ds和Cs分別表示前饋和輸出矩陣。車速及其違規限制在(21.f)和(21.g)中表示。通過減少(21.h)中的控制輸入數量可以降低計算成本,并且控制輸入在第一個Nc預測步驟之后每Nrc步驟改變一次。
III.案例分析
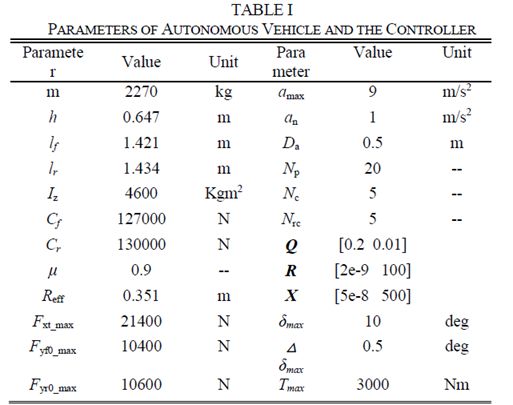
自動駕駛車輛和控制器的參數如表I所示。
案例研究1:如圖5所示,自我車輛在車道1上以60km / h的速度起動,同時在車道2中間,前方10m處有一輛障礙車輛。1號車道的人行橫道已滿。然而,道路邊界沒有隔離帶。在這種情況下,碰撞是不可避免的,因為車輛1和行人之間沒有足夠的空間停車,車道2也不清楚。
圖5.案例研究1的示意圖
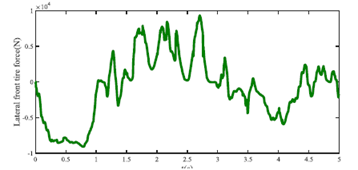
使用工作中描述的方法,自我車輛的橫向距離如圖6所示。可以看出,車輛選擇越過道路邊界而不是撞擊行人和左側車輛。速度如圖7所示,可以看出自我車輛也采用苛刻的制動來越過道路邊界。圖8展示了自我車輛的前輪胎力。
圖6.自我車輛的橫向距離
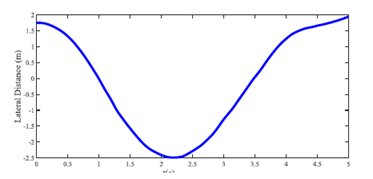
圖7.自我車輛的縱向速度
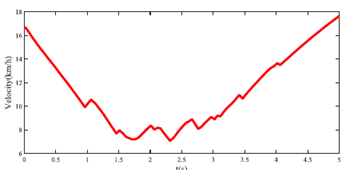
圖8.自我車輛的橫向前輪胎力
案例研究2:自我車輛在車道1上以60km / h的速度啟動。在車道2的中間有一輛障礙車1,速度為25km / h,最初在X方向上在障礙物前方的10m處。人行橫道部分和右側人行道都被行人占用。與此同時,左側人行道是空的。設計這樣的情況使得自我車輛在停留在道路邊界內時不能避開兩個障礙物。示意圖如圖9所示。
圖9.案例研究2的示意圖
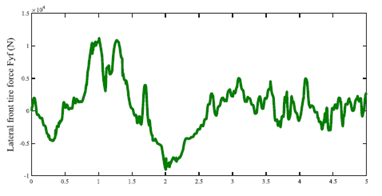
自我車輛的軌跡如圖10所示。在這種情況下,自我車輛避免撞擊行人并通過進入左車道來最小化事故嚴重性。圖11顯示了自我車輛的縱向速度。圖12顯示了自我車輛的前輪胎力。據我們所知,人類生命的保護是最重要的。仿真結果滿足聯網和自動駕駛車輛交通道德規則的要求。
圖10.自我車輛的橫向距離

圖11.自我車輛的縱向速度
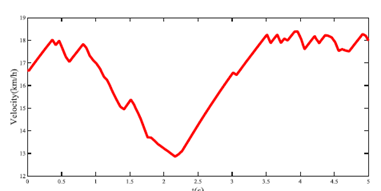
圖12.自我車輛IV的橫向前輪胎力。
IV.結論
本文提出了一種用于自動駕駛車輛的路徑規劃方法,尤其是當碰撞不可避免時,通過產生盡可能減輕碰撞的軌跡。假設運動規劃模塊從全局規劃模塊接收期望的車道和速度信息,并且從感知模塊接收障礙物和道路邊界的信息。本研究采用模型預測控制算法進行路徑規劃。為了達到避障的目的,將提出的描述障礙物的碰撞嚴重度因子和人工勢場插入到成本函數中,如果避障是不可能的,則為最低碰撞嚴重度。此外,車輛動態也被考慮到該最優控制問題中以確保所產生的路徑的可行性。仿真結果表明,MPC算法能夠避開障礙物,并在碰撞不可避免的情況下減輕碰撞。這種擬議的路徑規劃方法正在進行實地測試,未來應該分析更多的城市情況,例如交通燈處的緊急情況。
致謝
作者要感謝安大略省研究基金會(ORF)和加拿大自然科學與工程研究委員會(NSERC)的慷慨贊助。
參考資料
-
MPC
+關注
關注
2文章
36瀏覽量
21709 -
自動駕駛
+關注
關注
793文章
14879瀏覽量
179789
原文標題:自動駕駛汽車的本地路徑規劃:減少碰撞
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄



 工商網監
工商網監
評論