 一文詳解IGBT IPM的控制輸入
一文詳解IGBT IPM的控制輸入

關鍵要點
控制引腳HINU、HINV、HINW分別對應高邊IGBT的U相、V相、W相控制輸入;LINU、LINV、LINW則分別對應低邊IGBT的U相、V相、W相控制輸入。
需考慮誤動作風險,為規避噪聲干擾而插入RC濾波器時,應結合內部下拉電阻進行設計,確保滿足控制引腳的輸入規格要求。
控制輸入引腳HINU、HINV、HINW具備ROHM自有功能——在HVCC無通電狀態下,可顯示各機型固有的電阻值,可在安裝到電路板上之后識別機型,從而檢測出誤裝等異常情況。
機型識別電阻的測量,應按照規定的測量方法進行。
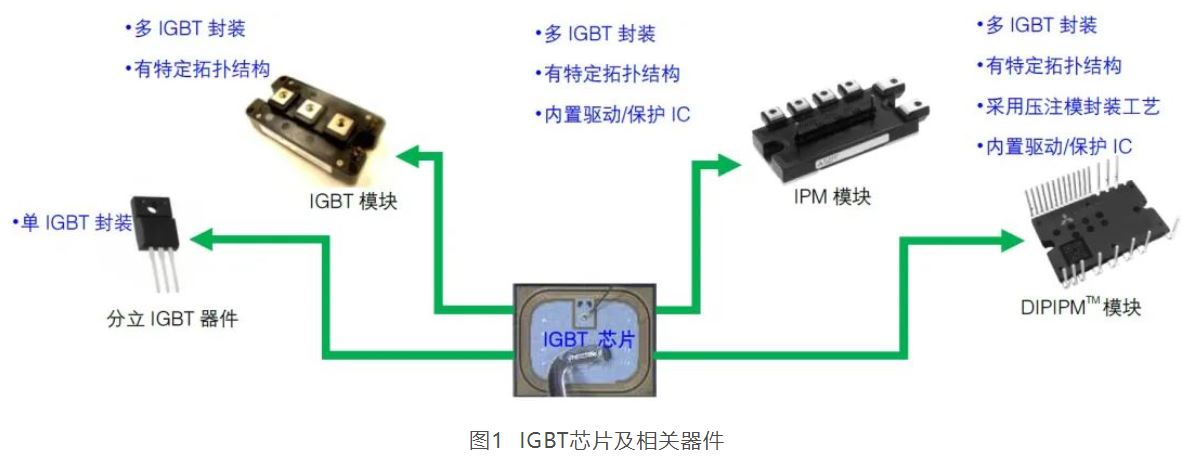
本文將介紹“IGBT IPM:保護功能和工作時許”的最后一項“控制輸入”。
短路電流保護功能(SCP)
控制電源欠壓誤動作防止功能(UVLO)
熱關斷保護功能(TSD) *僅限BM6337xS
模擬溫度輸出功能(VOT)
錯誤輸出功能(FO)
控制輸入(HINU、HINV、HINW、LINU、LINV、LINW)
IGBT IPM的控制輸入
(HINU、HINV、HINW、LINU、LINV、LINW)
HINU、HINV、HINW分別為高邊IGBT的U相、V相、W相控制輸入端;LINU、LINV、LINW則分別為低邊IGBT的U相、V相、W相控制輸入端。它們通常接收來自MCU的控制信號。輸入信號為高電平有效。下面是包括與MCU的連接示例在內的框圖。紅色方框圈起來的引腳為控制輸入引腳。
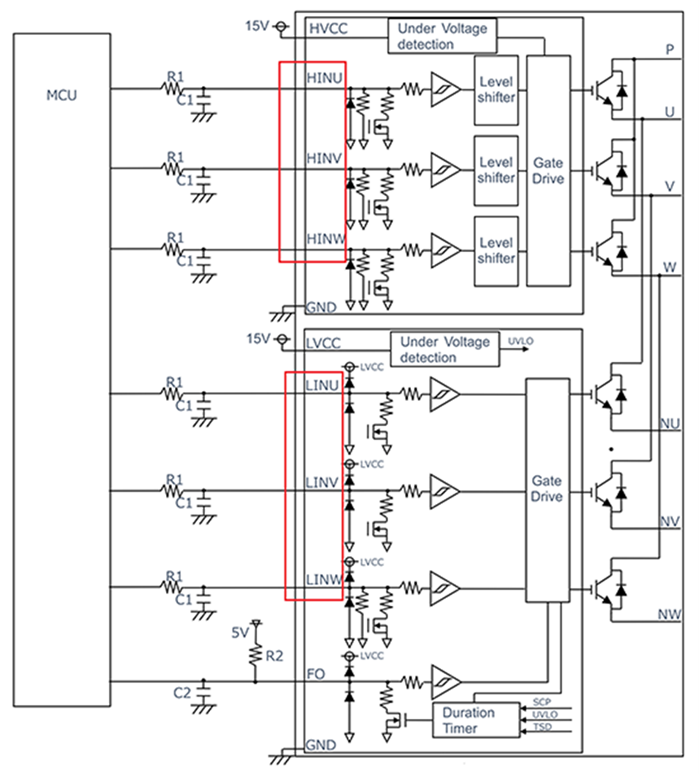
控制輸入引腳
關于控制輸入引腳需要注意的是,為防止誤動作,布線要盡可能短。相應地,為避免噪聲等的影響而插入RC濾波器(框圖中的R1和C1)時,需要考慮到框圖中所示的內部下拉電阻。下拉電阻的最小值為3.3kΩ,標準值為5.0kΩ,最大值為7.1kΩ。插入RC濾波器后,仍需確保滿足控制引腳的輸入規格要求。下表中是控制輸入引腳的規格。

對于控制信號,存在上下橋臂死區時間、PWM輸入頻率、容許最小輸入脈沖寬度等推薦工作條件,需遵循這些要求。詳情請參閱產品規格書。
通過控制輸入引腳實現產品識別功能
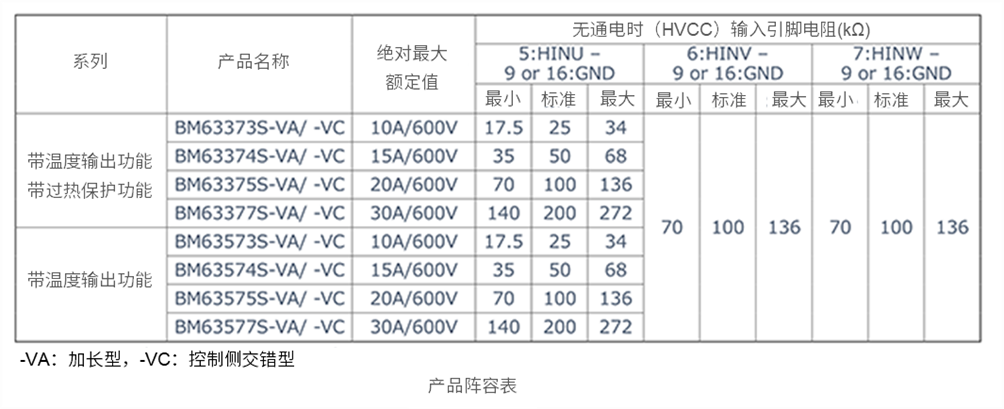
控制輸入引腳HINU、HINV、HINW配備了ROHM自有功能——在HVCC無通電狀態下,可顯示因機型而異的電阻值。通常,模塊的機型名稱會印在封裝背面,因此安裝到電路板上之后很難確認機型。本系列產品通過測量這些引腳的電阻值,可在安裝到電路板上之后進行機型識別,從而有效地檢測出封裝相同的其他公司產品或電流額定值不同的機型的誤裝情況。下面是各機型的電阻值以及控制輸入引腳HINU、HINV、HINW的電阻和框圖。
關于該功能,有以下確認事項及注意事項。
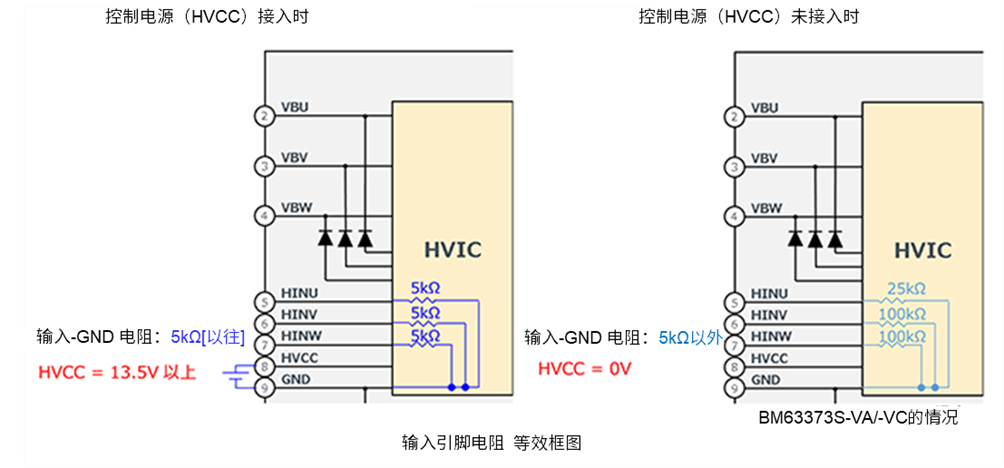
?當不對LVCC引腳和HVCC引腳施加電壓時,HVCC的控制輸入引腳HINU、HINV、HINW將呈現上表規格所規定的電阻值,而LVCC的控制輸入引腳LINU、LINV、LINW則處于高阻抗狀態。
?控制輸入引腳內部的下拉電阻在向LVCC和HVCC引腳施加推薦工作電壓時生效,其阻值為3.3kΩ/5.0kΩ/7.1kΩ(最小值/標準值/最大值)(圖中標注為標準值5kΩ)。
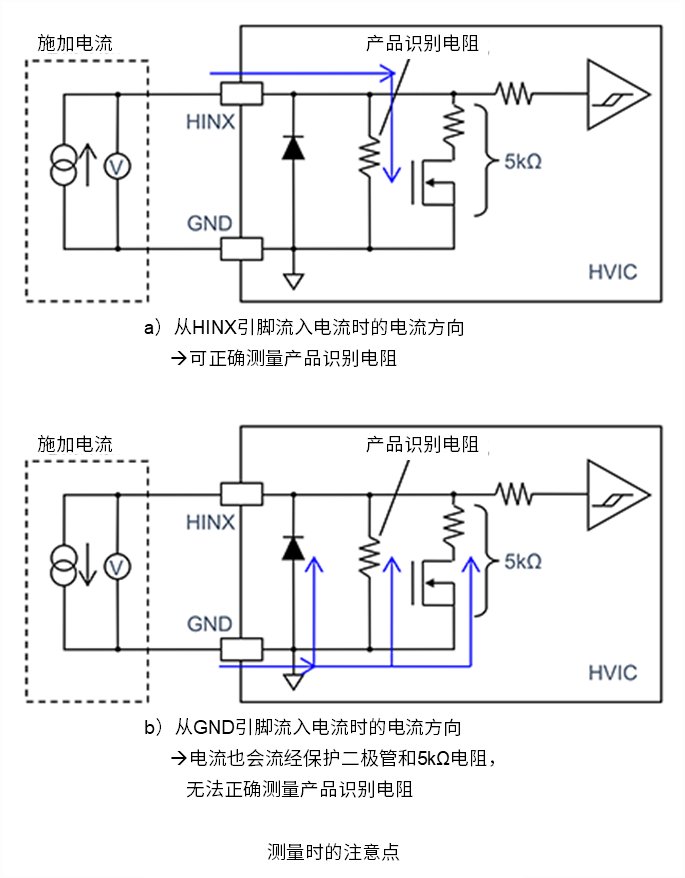
?在測量HIN-GND之間、HINV-GND之間、HINW-GND之間的電阻值時,請在電流從HINx引腳流向GND時進行測量,否則無法正確測得電阻值。
關于第三項的正確測量方法,請參考下圖。
-
IGBT
+關注
關注
1286文章
4216瀏覽量
259937 -
引腳
+關注
關注
16文章
2068瀏覽量
54991 -
IPM
+關注
關注
5文章
178瀏覽量
40006
原文標題:R課堂 | IGBT IPM的控制輸入(HINU、HINV、HINW、LINU、LINV、LINW)
文章出處:【微信號:羅姆半導體集團,微信公眾號:羅姆半導體集團】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
一文讀懂:IPM與IGBT模塊的工作原理和區別
IGBT和IPM及其應用電路教程pdf
【好書分享】IGBT和IPM及其應用電路
IGBT驅動板,IGBT驅動核,IGBT驅動芯,IGBT適配板,IPM之間的區別
IPM如何從可用的IGBT器件中獲得最佳性能?
IPM如何從可用的IGBT器件中提取最佳性能?
什么是IGBT IPM(Intelligent Power Module)?
功率模塊IPM、IGBT及車用功率器件






 工商網監
工商網監
評論