 中偉視界:告別人工巡檢,基于AI視覺的港口皮帶機異物檢測完整解決方案
中偉視界:告別人工巡檢,基于AI視覺的港口皮帶機異物檢測完整解決方案

港口皮帶異物檢測項目方案
一、項目背景與必要性
港口運輸系統中,皮帶輸送機作為關鍵設備,其安全運行直接關系到整個港口的作業效率與運營安全。在礦石、煤炭等運輸過程中,金屬雜物(如鏟齒、鋼筋)、大型異物(如木材、廢棄輪胎)以及異常物料(如凍塊、超大石塊)混入運輸物料的情況時有發生。這些異物可能導致皮帶縱向撕裂、托輥損壞甚至電機過載故障,造成每小時高達數萬元的生產停滯損失。傳統檢測主要依賴人工巡檢和機械式傳感器,存在識別率低(<60%)、誤報率高及響應延遲等問題,尤其在夜間、霧天等能見度低下工況時表現更為突出。

近年來的技術發展為解決這一難題提供了可能。人工智能視覺識別和邊緣計算的突破性進展,配合服務端預警平臺的及時聯動,使高精度實時異物檢測成為可能。智能化系統可將故障停機時間減少40%以上,同時降低70%的巡檢人力成本。本方案旨在整合先進技術,構建一套全覆蓋、高精度、快響應的皮帶異物智能檢測系統,為港口的安全生產增效降本,減少安全隱患,預防安全事故,提供可靠的技術保障。
二、系統總體設計
2.1 系統架構
本方案采用三級分布式架構(感知層、決策層、執行層),構建完整的“檢測-分析-處置”閉環系統。系統通過前端傳感網絡實時采集數據,邊緣節點進行初步處理,服務端平臺執行深度分析和策略制定,最終通過控制系統執行相應動作,實現全流程智能化管理。
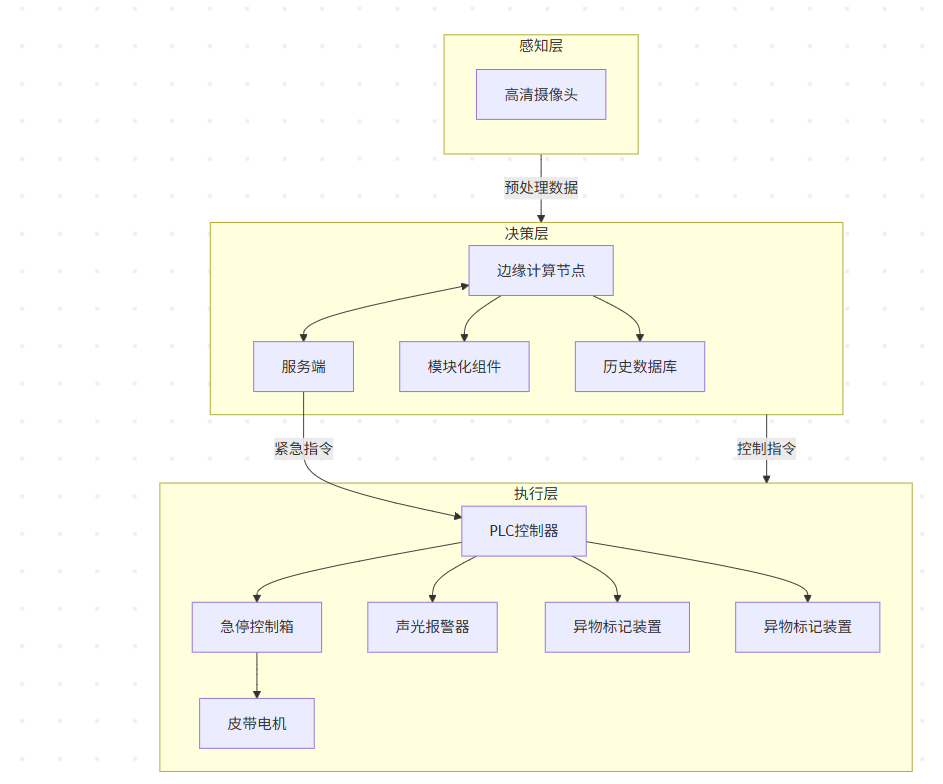
感知層: 由黑光全彩超級寬動態變焦高清攝像機(200萬像素以上,幀率≥25fps)。設備以間距≤50米的密度部署于皮帶沿線,重點覆蓋轉運站、卸料口等高風險區域,實現運輸全過程無死角監控。
決策層: 采用邊緣計算、模塊化部署、服務端協同計算架構。邊緣側部署輕量化推理模型,實現毫秒級實時響應,采用模塊化部署,各模板獨立運行,且與皮帶控制系統PLC直接連接,第一時間聯動PLC系統;服務端建立深度神經網絡模型,通過持續學習機制提升識別準確率。系統支持動態閾值調整,可根據物料類型(礦石/煤炭/糧食)、環境條件(白天/夜晚/雨霧)優化檢測參數。
執行層: 整合皮帶機PLC控制系統和急停模塊,支持分級響應機制:異物預警→聲光報警→自動減速→緊急停機,實現精準化、梯度化處置,并通過短信、電話聯動平臺,對不同等級事件自動通知相關人員。
三、核心模塊實現
3.1 基于AI視覺的異物檢測
圖像采集優化: 系統配置黑光全彩超級寬動態變焦高清攝像機(200萬像素以上,幀率≥25fps),解決逆光、光線不佳、粉塵干擾問題。采用主動紅外補光技術(波長850nm),有效提升夜間和隧道區域的圖像質量,使全天候識別準確率保持穩定。針對港口高粉塵環境,特別設計自清潔防護罩,配備自動雨刮,確保持續獲得清晰圖像。
深度學習識別: 采用改進的YOLOv8-MSA模型,針對典型異物進行專項優化:
主干網絡引入MobileViT輕量化設計,減少計算量40%
添加注意力機制模塊(CBAM),提升小目標識別能力
輸出層采用自適應錨框技術,適應不同形狀異物
模型訓練采用合成數據增強技術,生成10萬+標注樣本(涵蓋金屬、木材、繩索等20類異物),結合遷移學習(基于COCO數據集預訓練),在測試集上達到98.2%的mAP值。
3.2 邊緣計算部署
為實現實時響應,系統采用邊緣計算、模板化部署、服務端協同計算架構:
邊緣節點: 搭載國產化海思芯片模組,運行輕量化推理模型,執行實時異物檢測(處理延時<50ms)。當檢測到高風險異物(如金屬長桿)時,可在極短時間內觸發緊急停機。
模塊化部署: 各模塊獨立運行,獨立部署,也可集中部署和控制,與PLC系統直接連接,可輸出MODBUS協議,第一時間與PLC系統互動,減少延時。
服務端平臺: 基于寶塔容器化部署,提供即時預警、報警聯動、模型訓練、大數據分析及預測性維護功能。系統分析歷史數據,建立故障預測模型,提前發現潛在風險點。
4.系統集成與聯動控制
檢測系統與港口現有PLC控制網絡深度集成,通過MODBUS協議實現安全通信。設計分級響應機制,實現精準化處置:
一級預警(低風險): 如發現小型塑料、紙屑等無害異物,系統記錄位置并后臺告警,皮帶維持正常運行
二級響應(中風險): 檢測到可能造成卡堵的異物(如木塊、橡膠),自動觸發料流調整(降低帶速至50%)并發出聲光報警
三級急停(高風險): 識別到金屬異物、尖銳物等高風險物體時,200ms內觸發急停回路,同時聯動上游設備停機,避免事故擴大
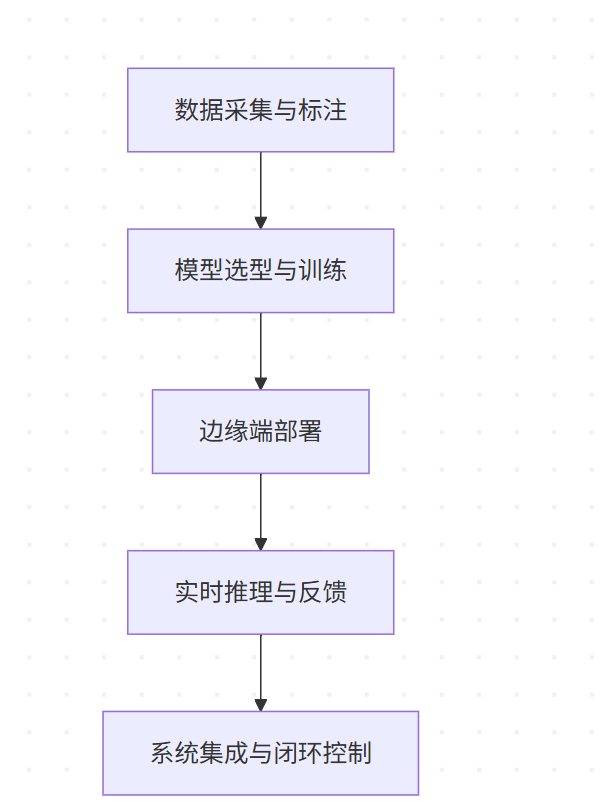
四、整體實現流程圖
五、分步驟詳解
步驟1:數據采集與標注(核心基礎)
數據源:
真實場景: 港口皮帶固定點位攝像頭(分辨率≥1080P,幀率25fps)
覆蓋條件: 晴/雨/霧/晝/夜、各種異物在不同物料、不同位置
標注要求:
檢測標注: 異物、皮帶有料、皮帶無料
分類標注: 不同異物分類標注名稱
困難樣本標注: 異物不同程度被物料覆蓋,顯露出不同形狀及顏色,盡量多的覆蓋已知物料
數據量要求: 初始數據集 ≥ 5000張圖像
步驟2:模型訓練與調優
狀態分類:
輸入: 檢測模型輸出已知物料
關鍵技巧:
局部特征增強: 對皮帶區域位置做局部放大
多尺度特征融合: 將淺層細節(邊緣/紋理)與深層語義特征拼接
邊緣端部署:
步驟3:實時推理與反饋機制
動態閾值處理: 當分類置信度 < 0.9時,觸發多幀驗證機制(連續3幀結果一致才輸出)
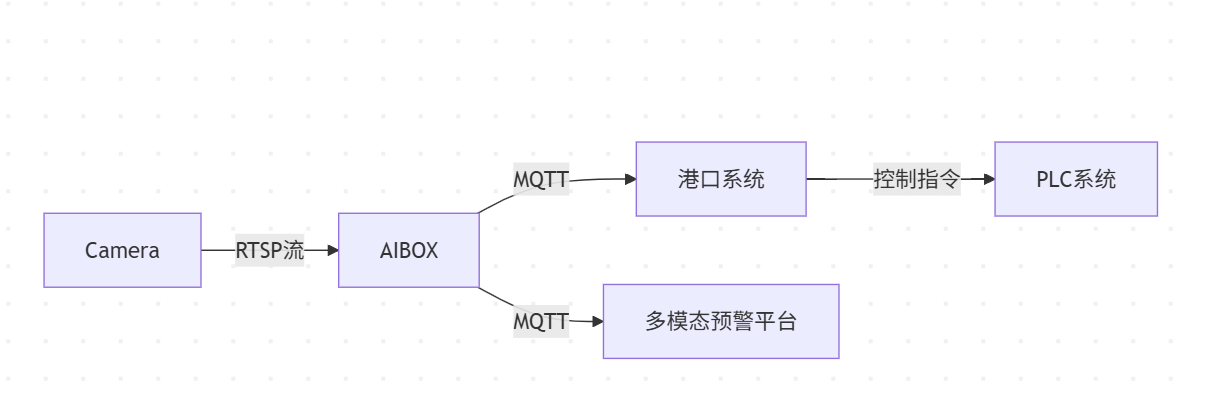
多目標分層次檢測: 物料、異物多目標分層次檢測,先檢測到皮帶上有無物料,確定皮帶上有物料的狀態下再檢測有無異物,當檢測到有異物后上報港口系統和多模態預警平臺;當檢測到有物料的情況下,發現與物料有較大狀態和顏色區別時,而且不為已知物料,則上報港口系統和多模態預警平臺為未知異物。
步驟4:系統集成與閉環控制
與港口系統對接:
識別到 “異物”→ 觸發PLC系統,根據不同異物等級聯動不同功能
多模態預警平臺
檢測到 “異物” → 現場聲光報警 + 中控臺彈窗
短信、電話自動通知相關人員
自學習閉環:
邊緣設備收集低置信度樣本 → 增量訓練模型 → 推送更新至邊緣端
實現流程的核心要點
數據為先: 覆蓋極端場景的工業數據集是模型魯棒性的根基
模型輕量化: 邊緣端部署必須平衡精度與速度
閉環設計: 從識別→控制→自學習的全鏈路自動化
最終目標: 實現“無人干預”的皮帶異物感知-決策-執行閉環,推動港口真正邁向“黑燈工廠”。
六、總結
本方案通過AI視覺檢測和智能聯動控制技術創新,構建了港口皮帶運輸異物檢測的完整解決方案。
未來技術演進將聚焦以下方向:
多模態大模型應用 :探索基于GPT-4o架構的港口通用視覺模型,實現更精準的異常推理
跨設備協同: 實現無人機-巡檢機器人-固定監控的“空天地”一體化監測,覆蓋100%盲區
港口皮帶運輸異物智能檢測系統不僅是技術升級,更是推動港口安全綠色轉型的核心引擎。通過持續技術創新與數據積累,該系統將為構建“零事故、零排放”的智慧港口提供堅實保障。
審核編輯 黃宇
-
AI視覺
+關注
關注
0文章
111瀏覽量
4983
發布評論請先 登錄

中偉視界:AI視覺在港口苫布管理中的應用實踐

實戰復盤:皮帶機聲振溫監測落地,跑偏故障降 70%

中偉視界:設計揭秘,基于工業相機與邊緣AI分析盒的堵料檢測硬件方案

思奧特智能視覺側發光與平行面光源在視覺檢測中的創新
皮帶機滾筒溫度高?監測系統報警,防皮帶燒斷
巡檢機器人落地攻略:RK3576驅動12路低延遲視覺
海康威視亮相2025智慧港口大會
無線數傳模塊助力港口設備聯動,解決皮帶機與斗輪機協同困境
3招告別無效巡檢!AI智能巡檢讓你的門店管理效率翻倍 智睿視界
RK3576賦能無人機巡檢:多路視頻+AI識別引領智能化變革
鐵路軌道異物精準檢測方案



 工商網監
工商網監
評論