") ABB工業(yè)機器人中不使人注意的5大實用技巧詳細概述
ABB工業(yè)機器人中不使人注意的5大實用技巧詳細概述

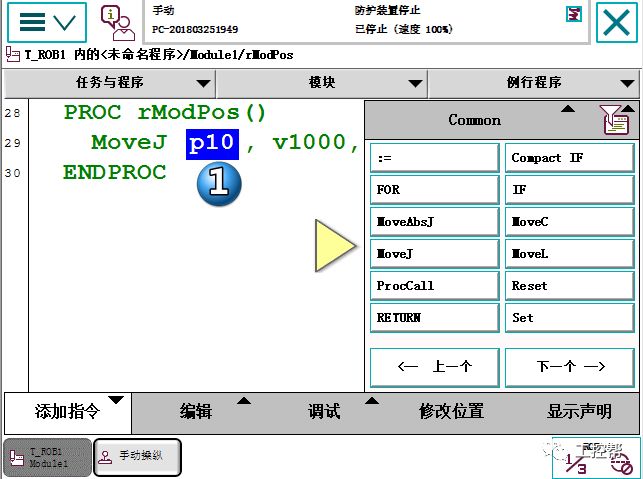
1.復(fù)制粘貼參數(shù)加快編程時間
有的時候我們需要快速大量的更改指令語句里的參數(shù),很浪費時間,實際上參數(shù)是可以復(fù)制的,步驟如下。

比如我們有個這樣的需求,就是將上面的V1000更改為V2000。
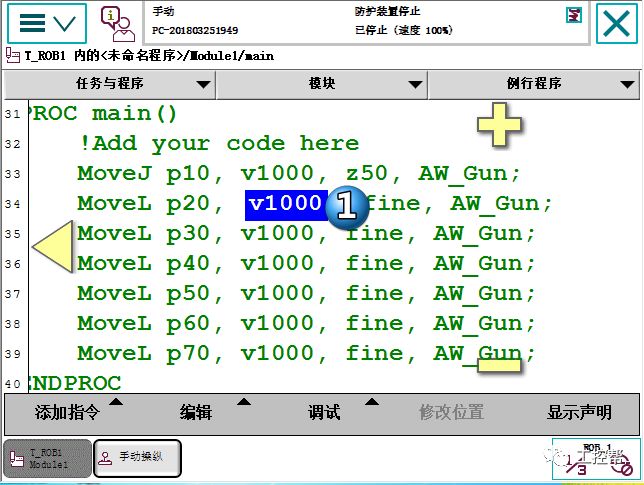

鼠標(biāo)左鍵雙擊“V1000”進入選擇“V2000”速度數(shù)據(jù),單擊確定。
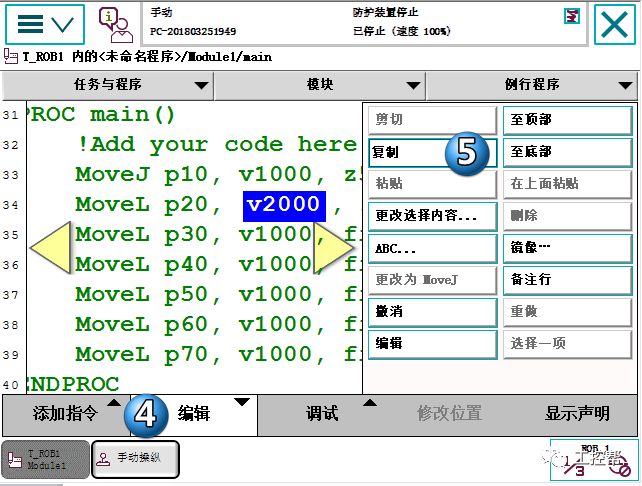
然后選擇“編輯”在下拉菜單中選擇“復(fù)制”對其單項速度參數(shù)進行復(fù)制。
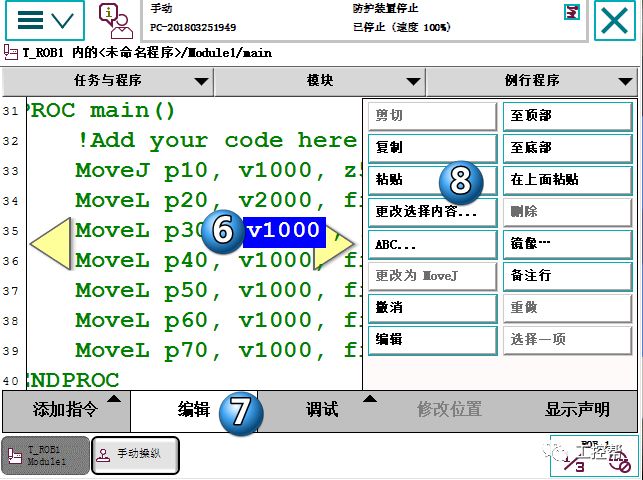
選擇下一條的“速度”參數(shù),然后選擇“編輯”,在下拉菜單中單擊“粘貼”選項。

這樣速度數(shù)據(jù)就已經(jīng)復(fù)制粘貼了一條,下面的速度數(shù)據(jù)也可以一直粘貼下去如下圖。
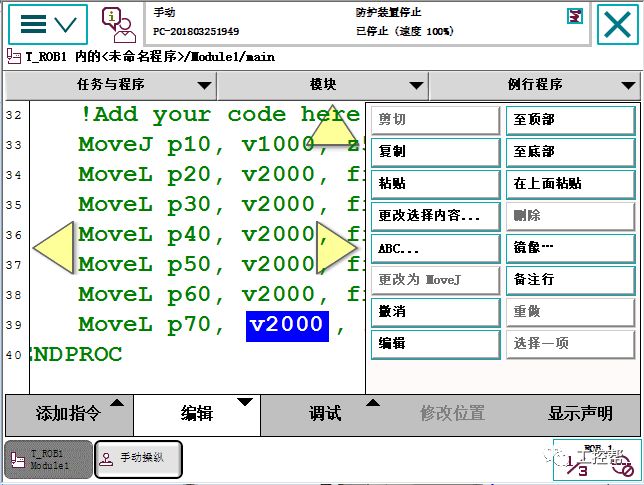
他的參數(shù)一樣可以復(fù)制粘貼,快動手試試吧!
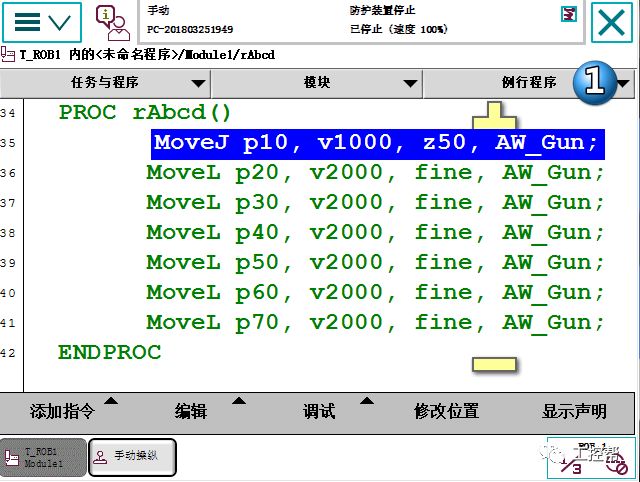
二、如何復(fù)制例行程序

首先要新建一個例行程序,比如這里新建立了一個rAbcd例行程序。
選擇“例行程序”

選擇“文件”菜單中的“復(fù)制例行程序”

確認名稱(不要與其他例行程序重名),確認復(fù)制到哪個任務(wù)里(默認就一個任務(wù)),確認復(fù)制到的模塊然后點擊確定。


復(fù)制完成
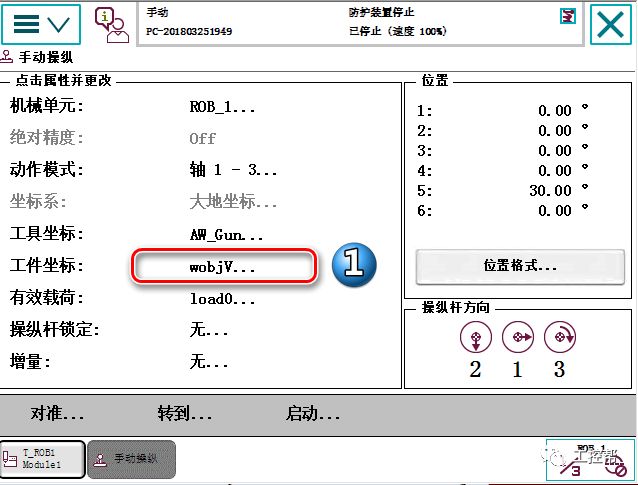
首先需要在需要對其的工作臺上建立一個工件坐標(biāo)系,這里工件坐標(biāo)系建立在矩形體表面上。
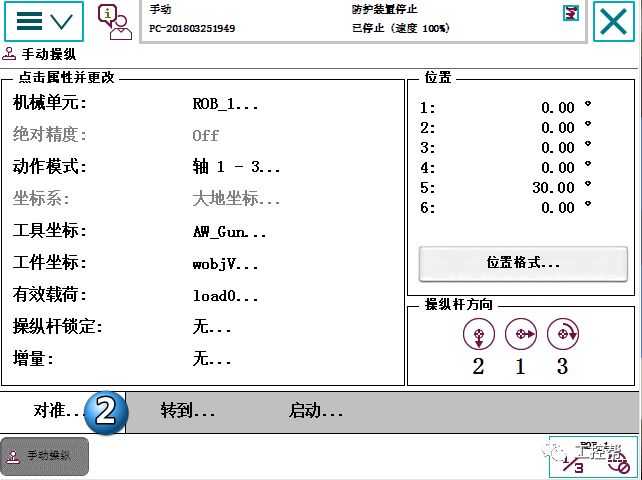
然后選擇對準(zhǔn)。
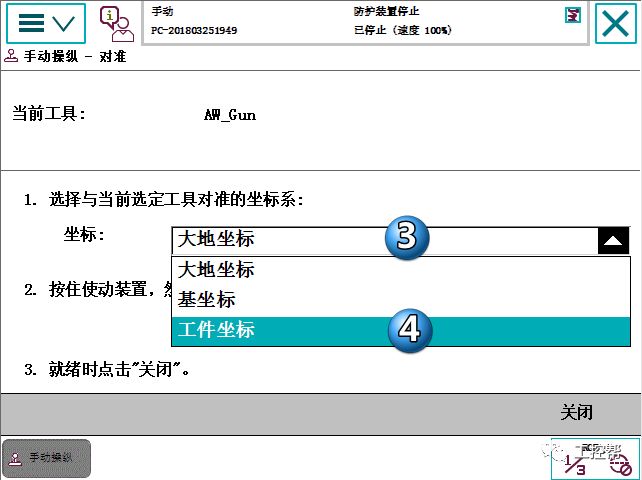
將坐標(biāo)系選擇為工件坐標(biāo)。
按下使能按鈕,點住開始對準(zhǔn),對準(zhǔn)之后工具末端z軸就會垂直于工作臺表面了。
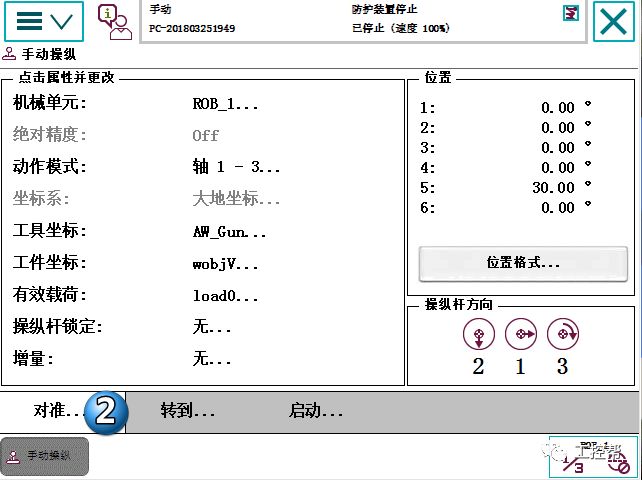
3.對齊坐標(biāo)系
有時候需要調(diào)整工具末端垂直于工作臺表面,如果工作臺表面有工件坐標(biāo)系這一切就簡單多了,我們有快速對正工件坐標(biāo)系的方法,下面來一起學(xué)習(xí)一下。
首先需要在需要對其的工作臺上建立一個工件坐標(biāo)系,這里工件坐標(biāo)系建立在矩形體表面上。
然后選擇對準(zhǔn)。

將坐標(biāo)系選擇為工件坐標(biāo)。
按下使能按鈕,點住開始對準(zhǔn),對準(zhǔn)之后工具末端就會垂直于工作臺表面了。
4. 如何快速查找指令
ABB工業(yè)機器人指令很多,有的時候需要切菜單進行查找,很繁瑣,這時候我們可以使用添加指令里面的過濾功能,達到快速查找指令的目的,以添加一條TPWrite指令為例,步驟如下。
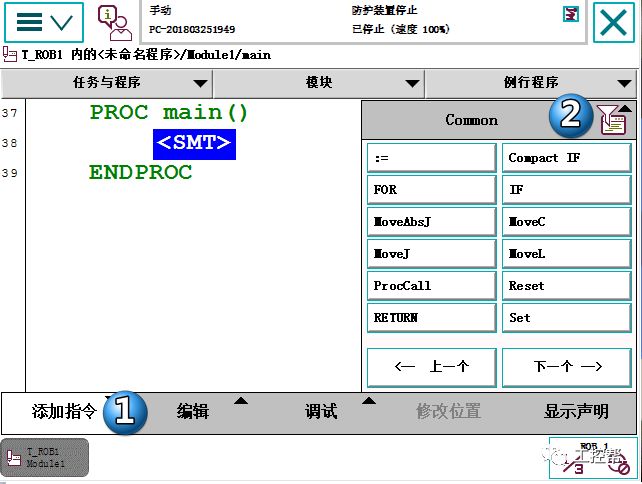
點擊添加指令,選擇指令菜單右上角的漏斗標(biāo)識(有些舊版本沒有,如果沒有漏斗標(biāo)識只能通過切換指令菜單來尋找指令)。

在活動過濾器輸入框里面輸入“TPWRITE”,鼠標(biāo)左鍵單擊“過濾器”。

這時候就能看見TPWrite指令了,點擊即可添加。
5.如何快速轉(zhuǎn)到位置
在現(xiàn)場編程中我們有時候需要確認已經(jīng)示教過點的位置,下面來學(xué)習(xí)一下轉(zhuǎn)到位置的操作步驟。
首先要有目標(biāo)點
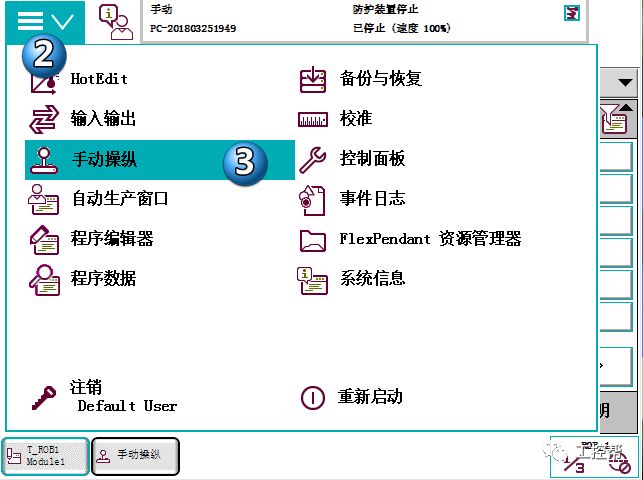
然后進入菜單點擊手動操縱。
確認機械單元活動工具活動工件等信息之后打開使能,選中P10目標(biāo)點點擊轉(zhuǎn)到。
-
編程
+關(guān)注
關(guān)注
90文章
3716瀏覽量
97191 -
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3534瀏覽量
98189 -
ABB
+關(guān)注
關(guān)注
26文章
572瀏覽量
56726
原文標(biāo)題:ABB工業(yè)機器人經(jīng)常忽略的實用技巧
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
工業(yè)顯示器在3D縫紉機器人中的應(yīng)用
工業(yè)顯示器在醫(yī)療配送消毒機器人中的應(yīng)用
突發(fā)!ABB機器人業(yè)務(wù)易主,軟銀53.75億美元接盤
工業(yè)機器人的智能之選:永銘電容器解鎖性能潛能

工業(yè)機器人線束揭秘 | 性能加持助力機器人作業(yè)效率穩(wěn)定躍升

工業(yè)機器人的特點
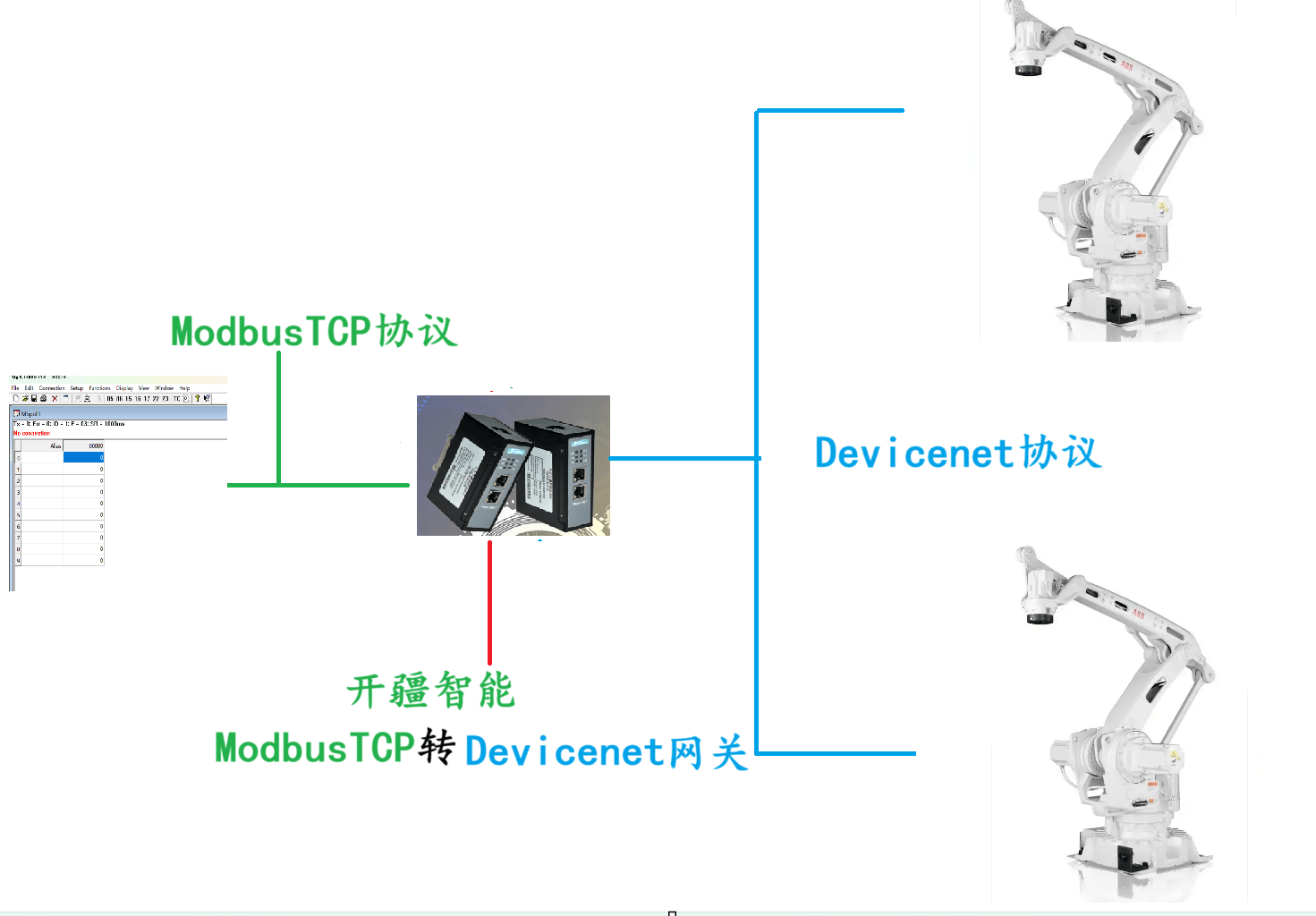
開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接三菱PLC與ABB機器人配置案例

開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接ABB機器人配置案例
工業(yè)機器人與協(xié)作機器人概念不同

開疆智能Profient轉(zhuǎn)ModbusTCP網(wǎng)關(guān)連接ABB機器人MODBUS TCP通訊案例




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論