 為什么步進電機的力矩會隨轉速的升高而下降
為什么步進電機的力矩會隨轉速的升高而下降

步進電機是一種將電脈沖信號轉換為角位移或線位移的開環控制元件,其工作原理基于電磁感應和磁阻變化。當步進驅動器接收到一個脈沖信號時,它就會驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),其旋轉以固定的角度一步一步運行。然而,在實際應用中,步進電機的輸出力矩會隨著轉速的升高而下降,這一現象主要由以下幾個方面的原因造成。
首先,步進電機的力矩下降與電機的電感特性密切相關。步進電機的繞組具有電感,而電感會阻礙電流的變化。當電機轉速較低時,驅動電路有足夠的時間為繞組提供電流,使電流能夠達到額定值,從而產生足夠的力矩。但隨著轉速的升高,脈沖頻率增加,每個脈沖的持續時間變短,電流在繞組中無法充分建立,導致實際電流值低于額定值。根據安培定律,電磁力矩與電流成正比,因此電流的下降直接導致輸出力矩的減小。這種現象被稱為“電流滯后效應”,是步進電機高速運行時力矩下降的主要原因之一。
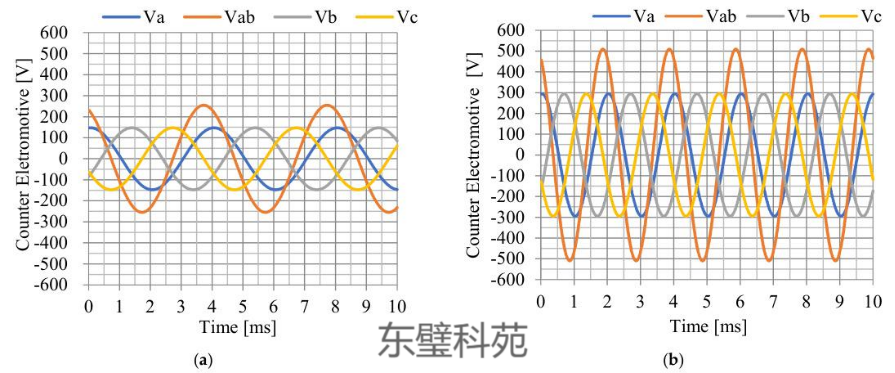
其次,反電動勢的影響也不容忽視。步進電機在旋轉時,繞組切割磁力線會產生反電動勢(Back EMF),其大小與轉速成正比。反電動勢的方向與驅動電壓相反,會抵消部分驅動電壓,從而降低繞組的有效電壓。當轉速升高時,反電動勢增大,繞組的有效電壓進一步降低,導致電流減小,力矩也隨之下降。特別是在高速運行時,反電動勢可能接近甚至超過驅動電壓,使得電流無法有效建立,力矩急劇下降。
此外,步進電機的機械損耗和鐵損也會隨著轉速的升高而增加。機械損耗包括軸承摩擦、風阻等,這些損耗會消耗部分輸入能量,降低電機的有效輸出力矩。鐵損則是由電機鐵芯中的渦流和磁滯效應引起的,隨著頻率的增加,鐵損會顯著增大,進一步削弱電機的輸出能力。這些損耗在低速時影響較小,但在高速運行時成為不可忽視的因素。
步進電機的驅動方式也對力矩-轉速特性有重要影響。常見的驅動方式包括單極性驅動、雙極性驅動、恒壓驅動和恒流驅動等。恒流驅動通常能夠在一定程度上緩解高速時的力矩下降問題,因為它通過調節驅動電壓來維持繞組電流的恒定。然而,即使采用恒流驅動,由于電感和反電動勢的存在,電流在高頻下仍然難以完全達到設定值,力矩依然會隨轉速升高而下降。此外,細分驅動技術雖然可以提高低速時的運行平穩性,但在高速時也可能因控制算法的延遲而導致力矩下降。
另一個關鍵因素是電機的設計參數。步進電機的力矩-轉速特性與其電氣時間常數和機械時間常數密切相關。電氣時間常數由繞組的電感和電阻決定,反映了電流建立的快慢;機械時間常數則與轉子的慣性和阻尼特性有關,決定了電機響應的速度。如果電氣時間常數較大,電流建立較慢,電機在高速時的力矩下降會更明顯。因此,設計低電感、低電阻的繞組可以改善高速性能,但這也可能犧牲低速時的力矩或增加成本。
在實際應用中,為了緩解步進電機高速力矩下降的問題,可以采取多種措施。例如,選擇電感較小的電機型號,因為低電感電機能夠更快地建立電流;采用更高的驅動電壓,以克服反電動勢的影響;優化驅動電路的電流控制算法,確保在高頻下仍能提供足夠的電流;或者使用閉環控制技術,通過反饋信號實時調整驅動參數,以維持穩定的力矩輸出。此外,對于高速應用,還可以考慮使用伺服電機或其他更適合高速運行的電機類型。
從能量轉換的角度來看,步進電機的高速力矩下降也反映了能量轉換效率的變化。在低速時,電能能夠較高效地轉換為機械能;而在高速時,更多的能量被消耗在克服電感、反電動勢和各類損耗上,導致有效輸出力矩降低。因此,步進電機的力矩-轉速曲線通常呈現單調下降的趨勢,這也是其工作特性的一大限制。
總結來說,步進電機力矩隨轉速升高而下降的現象是多種因素共同作用的結果,包括電感的電流滯后效應、反電動勢的抵消作用、機械損耗和鐵損的增加、驅動方式的限制以及電機設計參數的約束。理解這些原因有助于在實際應用中更好地選擇電機型號、優化驅動方案,并在必要時采用替代方案以滿足高速高力矩的需求。盡管步進電機在高速性能上存在局限性,但其結構簡單、控制方便、成本低廉的特點使其在眾多低速高精度場合中仍具有不可替代的優勢。
-
步進電機
+關注
關注
153文章
3248瀏覽量
152350
發布評論請先 登錄
步進電機有哪些相數?如何選擇?
步進電機發熱問題及對策
力矩電機在機器人身上發揮什么作用?

單片機怎么控制步進電機的
無線傳感器網絡在步進電機運行狀態監測中的應用
嵌入式力矩電機的設計方法研究
步進電機在高速運行時反電動勢波形與其動態響應變化
如何減少步進電機的發熱?
為什么直流力矩電動機轉矩大、轉速低?




 工商網監
工商網監
評論