 CW32助力2025電賽之5路循跡模塊使用說明(附資料)
CW32助力2025電賽之5路循跡模塊使用說明(附資料)

一、模塊概述
適配廣、調節靈、記憶準、好安裝
我們基于CW32L010芯片設計的5路智能巡線模塊,從實用性出發,解決了傳統巡線模塊的諸多痛點。
適用于各種地圖、各種顏色的線:通過可見光發射與光敏三極管接收的組合設計,能精準區分黑線、白線、綠線、紅線、藍線......;即使輕微抖動(如手持時),也能穩定識別,避免誤判。比賽地圖識別率高達95%以上。
一次校準,長期生效:校準后的數據會被模塊永久記錄,斷電再上電無需重復操作。一張地圖校準完成后,后續使用全程免校準,省心又高效。
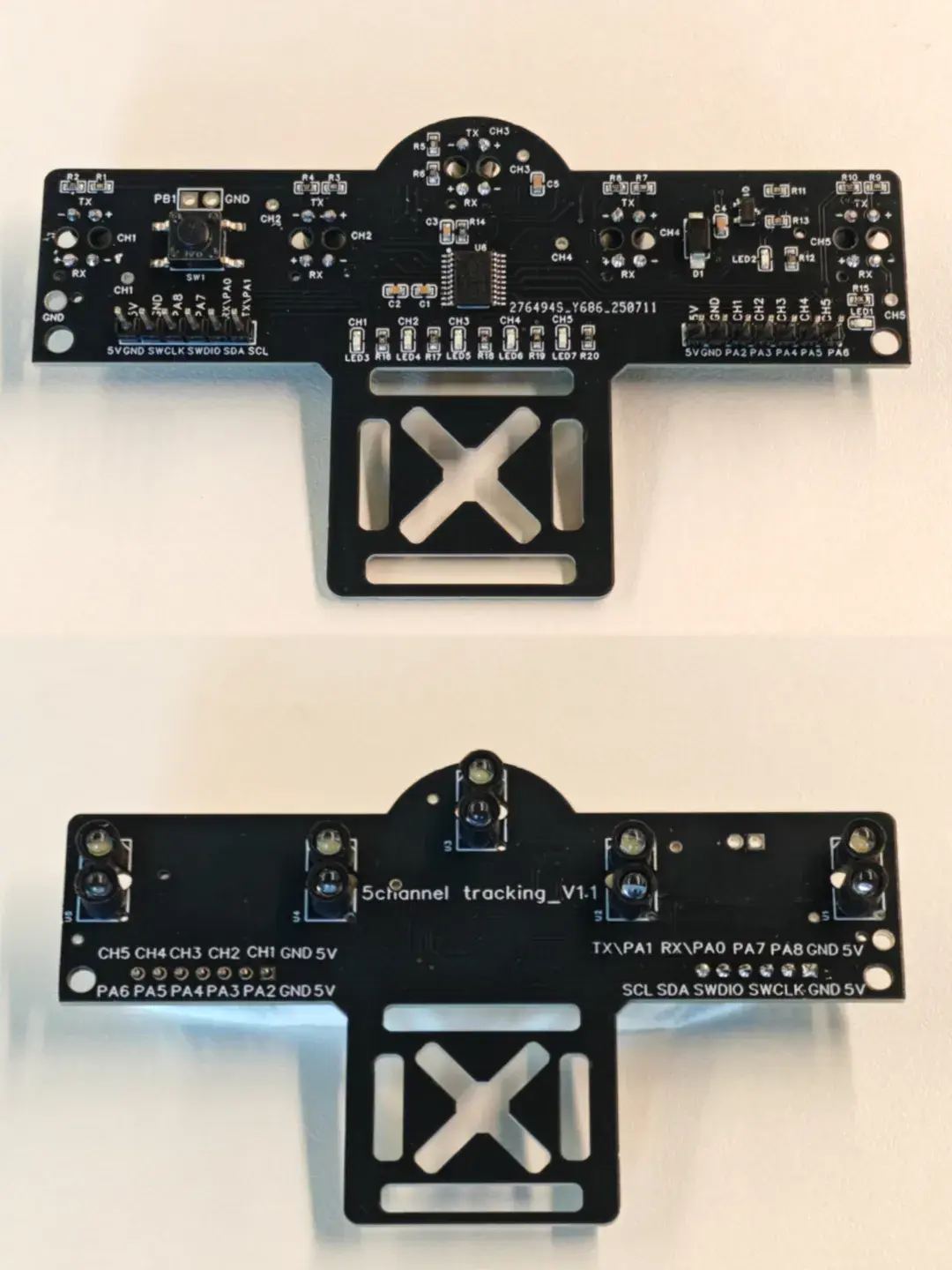
適配所有智能小車:自帶萬能安裝孔位結構,支持各種間距的安裝,無論你想安裝在什么樣的小車或是機器人上面,都能輕松勝任。
開源智能硬件:原理圖開源,程序源代碼公開,注釋清晰。所有參數清楚明白,可以按自己的需求,隨便修改。不但可以當模塊使用,還可以當嵌入式開發板來學習。
CW32L010芯片的主要特點:
CW32L010是武漢芯源半導體有限公司推出的基于ARM Cortex-M0+內核的超低功耗MCU,主頻高達48MHz,工作電壓寬達1.62V~5.5V,適用溫度范圍-40℃~85℃。其主要特點包括:
存儲與性能:集成64KB Flash(數據保持25年)和4KB SRAM,支持高實時性應用。
超低功耗:待機電流僅0.3μA(常溫),85℃高溫下漏電低至1.2μA,支持Sleep/DeepSleep模式。
高安全性:獨創指令總線保護機制,可隔離敏感代碼區域,防止黑客通過數據總線竊取核心算法。
12位ADC:2MSPS采樣率,16路輸入。IO為全ADC口,使用方便。
高級定時器支持6對互補PWM輸出及移相功能。
雙UART(支持LIN/RS485)、SPI、I2C等接口。
高精度RTC(補償精度0.060ppm) 。
高可靠性:通過±600mA閂鎖測試(行業平均3-6倍),增強抗干擾能力 。
二、基本操作說明
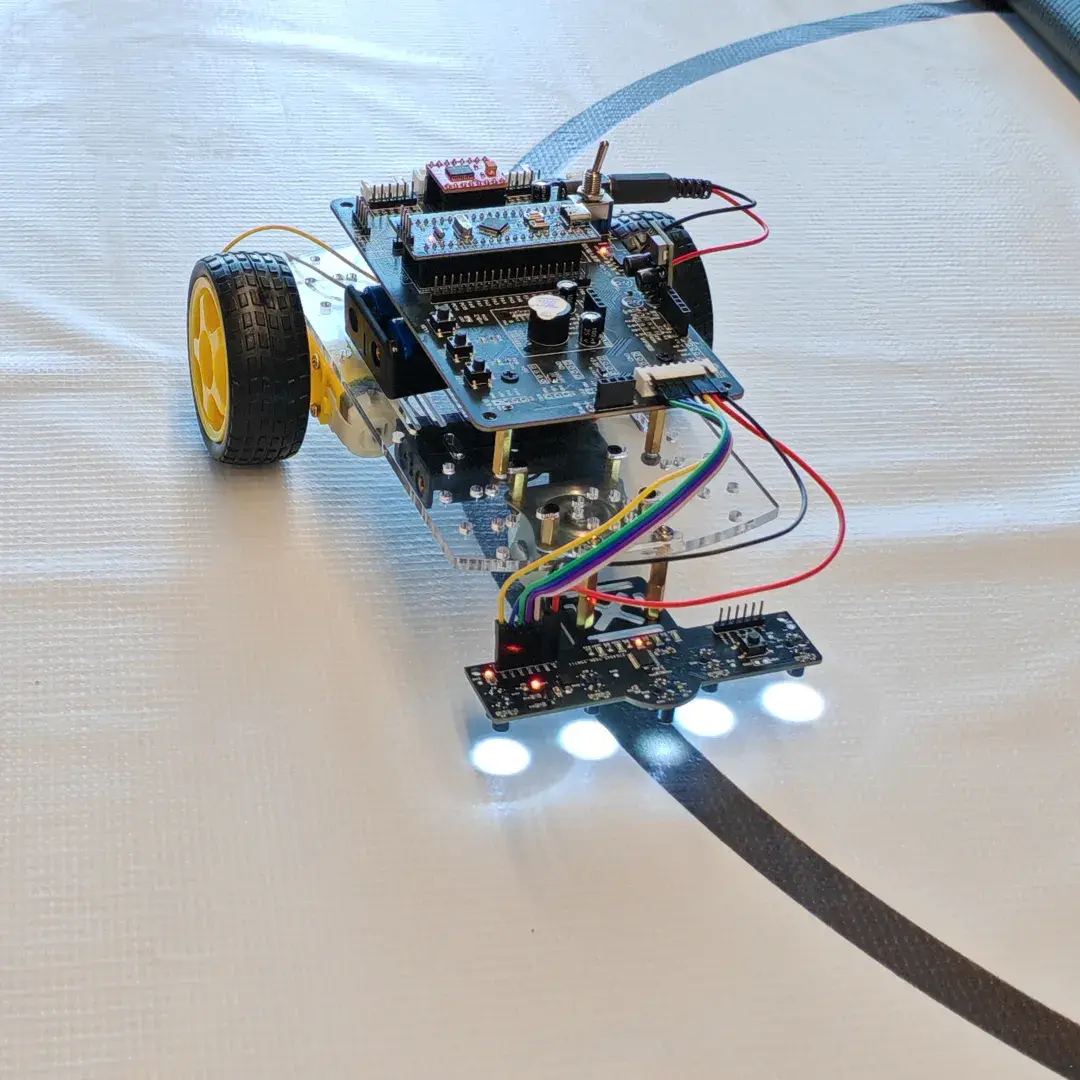
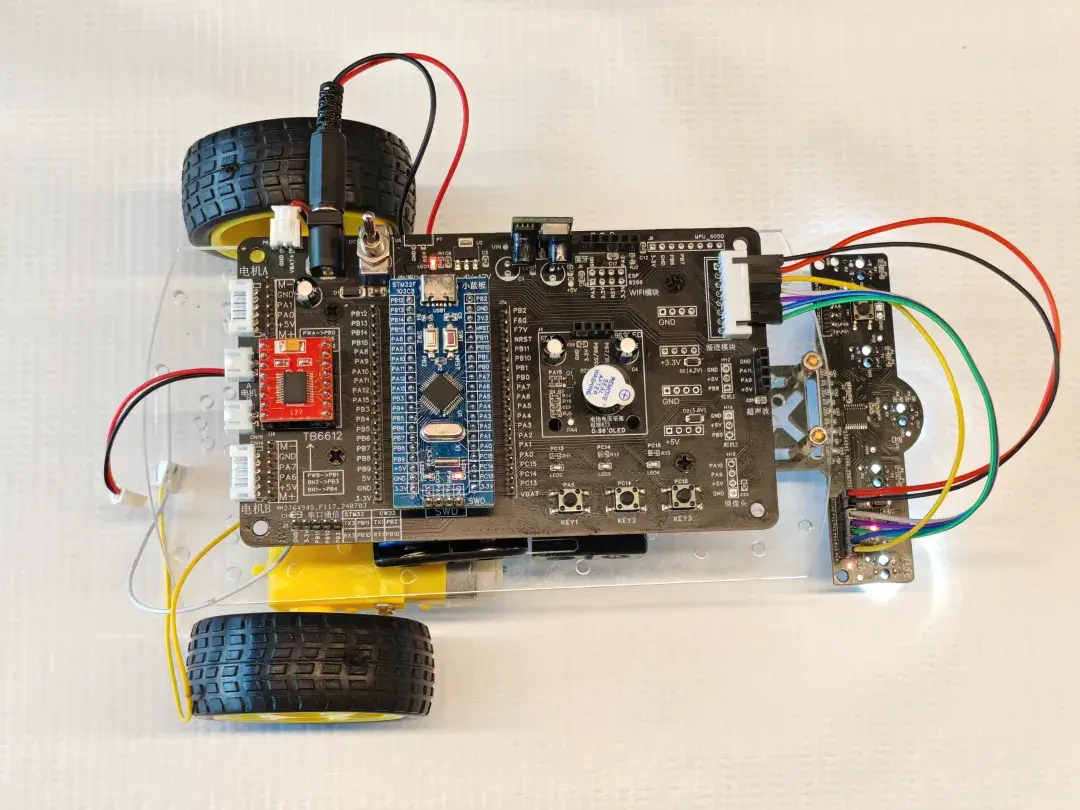
1.模塊安裝
通過銅螺柱、螺絲、萬能安裝孔位,安裝在小車上,建議安裝高度:5路LED燈底部離地圖面1~2CM。
傳統比較器的模塊,對安裝高度和水平都有很高要求。我們這個模塊,智能識別,對安裝無特別要求,螺絲連接擰穩定就好。
安裝示意圖見模塊接線節。
2.模塊接線
(1)模塊的供電
為了保持良好的識別效果,建議使用5V供電!
從主板的5V、GND連接到模塊H1或H2插頭上的5V、GND。
如果接上電源,LED不發光,請檢查電源供電是否正確,接線有沒有反?
模塊輸入電壓:DC 3.3~5.5V,要求供電側最大輸出功率要達到200mA。
模塊支持輸出TX的LED的電源關斷功能,需要自行修改源代碼。
隱藏彩蛋:TX開關功能,也可以擴展為光通信、光調制等功能,也可以關斷發射,采集環境光強,以采取不同的控制判別策略,可有效增強模塊的抗干擾能力,需要自行修改源代碼。
(2)模塊與主控MCU的連接
模塊的輸出接頭H1的CH1~CH5,依次連接到小車控制板或主控MCU的對應IO接口。
對應的探頭壓在黑線上,是輸出高電平!
注意:模塊供電是5V時,輸出高電平也是5V。連接STM32時,必須連接到5V電平兼容接口!不然要燒主控MCU!
隱藏彩蛋:如果連接到不支持5V電平的MCU,請將模塊的CH1~CH5通道的IO輸出模式配置為:OC(集電極開漏模式)的輸出模式。然后在MCU側的IO配置中,請配置為上拉輸入模式。
3.第一次使用校準
用戶拿到模塊,首先參照上面第1、2節安裝好模塊,并連接好供電線,就可進入第一次使用的校準模式了。
注意:必須要先安裝到車體上,再開始校準!不建議用手拿著模塊進行校準。
具體操作如下:
模塊上電,下面尋線的5顆發射燈發光,中間的五路指示燈開始閃爍,表示模塊已經進入“校準狀態”。
把五路LED燈放在圖紙上空白干凈的區域(非黑線區),參考第2節模塊接線處的圖片。
短按一下模塊上的校準按鍵,開始進行校準,校準時,五路指示燈會長亮約1秒,此時請勿觸動車體及模塊!
校準結束,指示燈快閃2次后熄滅,表示校準完成。
可以把CH1~5路燈分別置于黑線上,看對應通道的輸出指示燈是否亮起?如果在空白區域燈滅,在黑線區亮起,則校準成功。
如果校準不成功,可以長按校準鍵,重新校準。(具體操作參見下一節)
4.后續使用的再次校準
當用戶采用不同地圖時,或者小車所在的光的環境發生了明顯的變化,或其他原因,導致循線指示不準確時,均需要對尋跡模塊進行再次校準:
在模塊上電狀態時,長按校準按鍵(>1秒),五路指示燈開始閃爍,表示模塊已經進入“校準狀態”。
在指示燈閃爍時,再次長按校準按鍵,可以退出校準模式。此時原校準數據不會改變。
把五路LED燈放在圖紙上空白干凈的區域(非黑線區),參考第2節模塊接線處的圖片。
短按一下模塊上的校準按鍵,開始進行校準,校準時,五路指示燈會長亮約1秒,此時請勿觸動車體及模塊!
校準結束,指示燈快閃3次后熄滅,表示校準完成。
可以把CH1~5路燈分別置于黑線上,看對應通道的輸出指示燈是否亮起?如果在空白區域燈滅,在黑線區亮起,則校準成功。
如果校準不成功,可以長按校準鍵,重新校準。
如果反復校準,均不能準確識別需要循線的線條,請檢查地圖是否沒鋪平(有較大折疊),是否有污漬等。如果還是不行,請看下述第四章,高級操作。
三、工作原理簡介
1.硬件原理
模塊的發射(TX)為高亮度白光LED,接收(RX)為光敏三極管。
當模塊處在地圖的空白區域(通常為白色),TX白光,經過白色區域時,光線幾乎都反射到了接收RX,RX光敏三極管幾乎全開通,此時對應的CH1~5的測試點位置的電壓就較低,接近0.2V。
當經過黑色線條時,線條會吸引大部分光線,RX光敏三極管上接收的光線較少,此時RX幾乎不開通,對應的CH1~5的測試點位置的電壓就較高,可達2~3V。
不同顏色的線吸收白光不一樣,測到的電壓會有差別。不同工藝制作的地圖,反光不一樣,測到的電壓也會有差別。
另外,環境光強也會影響些電壓。當環境光較強時,建議采取遮光措施,或者采取更高級別的控制算法(如:加入調制解調控制,或改變傳感器等)。
硬件原理圖如下所示:

2.軟件算法簡介
MCU不斷地采集CH1~5的接收管(光敏三極管)亮度的ADC數值,并不斷地與存儲的校準數據相比較,如果它們的差值大于COMPARE_VALUE的設定值,則認為此通道壓在線條上,對應通道(CHX)輸出高電平。
四、高級操作說明
如果反復校準,均不能準確識別需要循線的線條,那可能是因為尋跡模塊當前程序里的設定參數,適配不了您的實際環境。
這時,您可以通過修改源代碼,或者配合萬用表測試進行調試,以實現靈活的需求,程序源碼鏈接放在了此文最末尾。
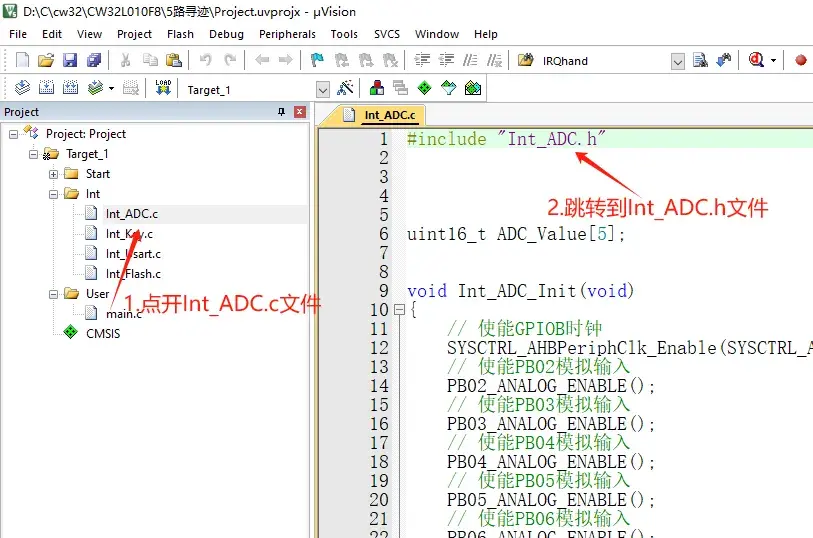
程序中閥值(比較值)的修改
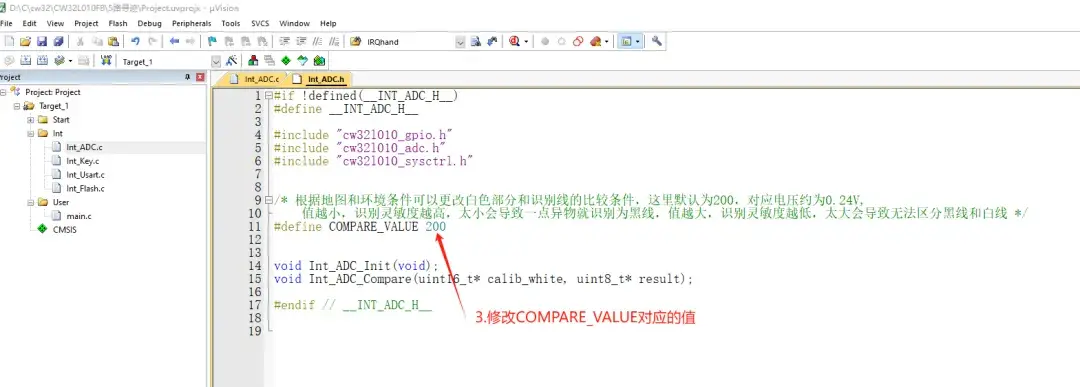
根據地圖和環境條件,可以更改地圖空白部分和要識別線的線的比較條件(COMPARE_VALUE)。這里默認值為200(ADC采集的代碼值),對應電壓約為0.24V。
循線的線條識別算法為:MCU不斷地采集接收管(光敏三極管)亮度的ADC數值,并不斷地與存儲的校準數據相比較,如果它們的差值大于COMPARE_VALUE的設定值,則認為此通道壓在線條上,對應通道(CHX)輸出高電平。
COMPARE_VALUE的設定值越小,識別靈敏度越高。但太小容易誤動作,如:地圖上的一點異物或車體的抖動,都有可能識別為黑線。值越大,識別靈敏度越低,抗干擾能力會強,但太大,又會導致無法區分黑線和白線。
那COMPARE_VALUE的值應該設置多大合適呢?需要結合第2節的萬用表測試來定。(200是我們的經驗值,一般地圖環境都合適。但如果光照強或地圖反光嚴重,可能要調小!)
下列圖展示了如何在程序中找到COMPARE_VALUE,并修改的設定值的過程。
2.如何使用萬用表測試
當地圖比較反光、或環境光線變化大、或需要尋線的線條是紅色等情況下,可能需要使用萬用表,分別測試地圖空白區域的接收管電壓,以及尋線線條上的電壓,并分別記錄下來。進行分析,得到合適的參數。
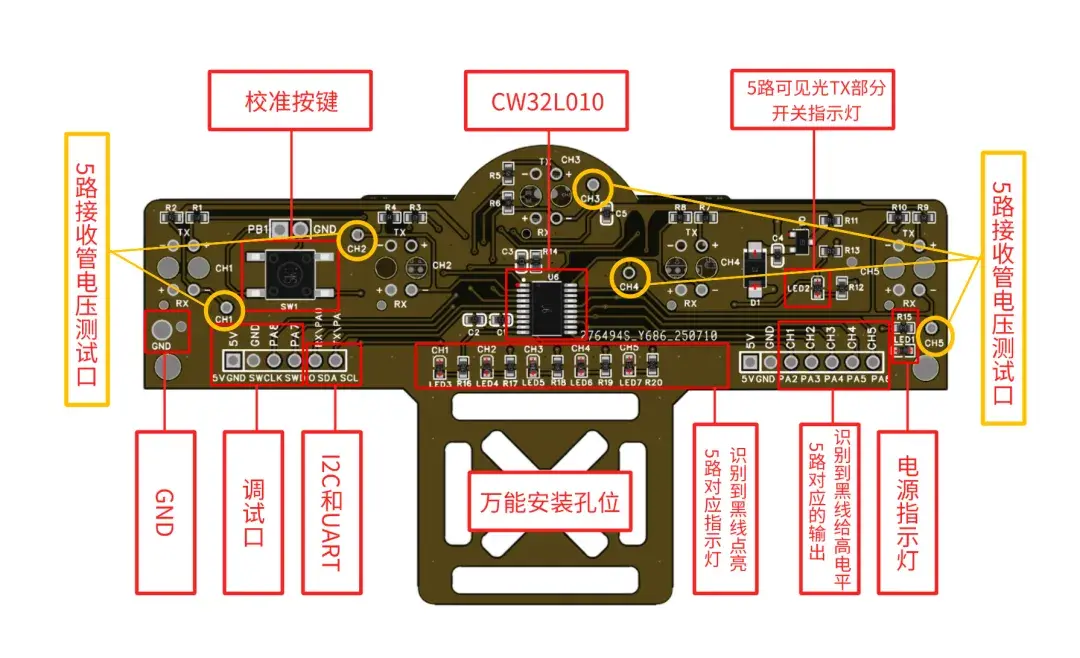
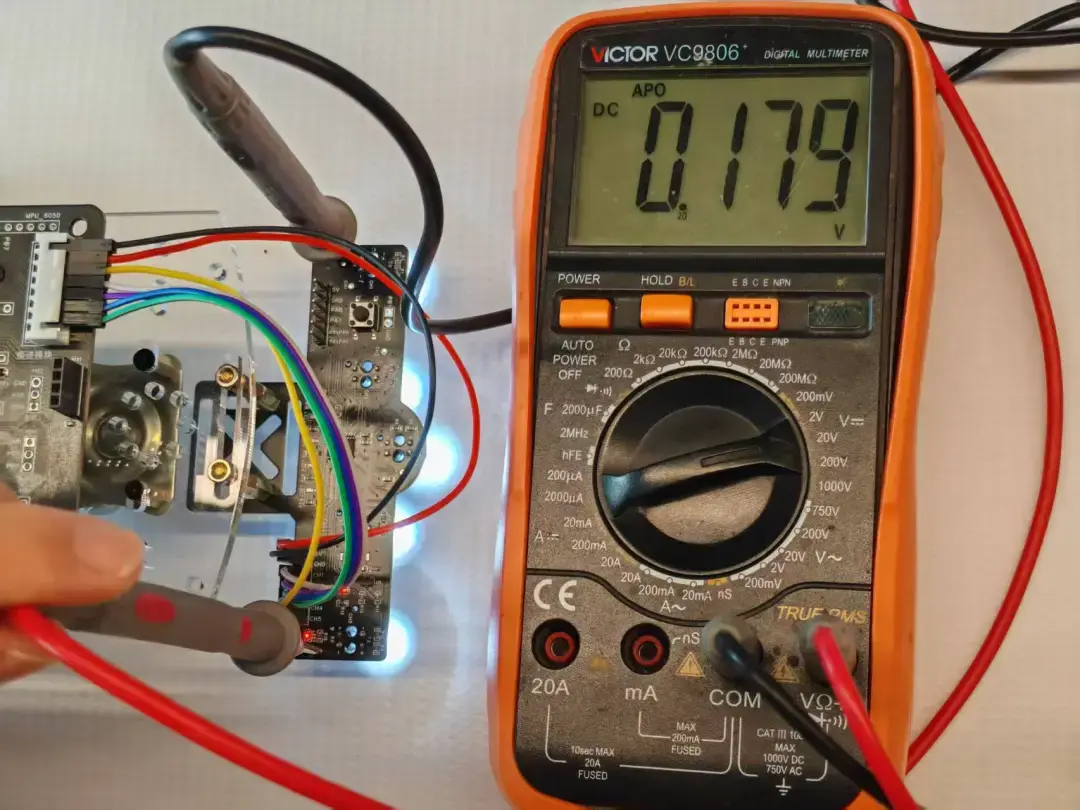
先把小車及模塊放在地圖空白區域:黑表筆插在GND孔,紅表筆分別測量CH1~CH5的5路接收管電壓測試口,記錄下空白區域的電壓值V1。(一般地圖在0.2V左右)
再把模塊對應的CHX壓在地圖的線條上:黑表筆插在GND孔,紅表筆分別測量CH1~CH5的5路接收管電壓測試口,記錄下壓在線條的電壓值V2。(一般黑線可達2~3V,綠線、藍線在1~2V;紅線在0.5V左右)
計算電壓差:Vs=V2-V1;根據電壓差值Vs/2(取Vs/2是為了提高抗干擾能力),去調整軟件中COMPARE_VALUE參數。
示例:假設測得V1=0.2V;V2=1.8V;Vs=V2-V1=1.6V;Vs/2=0.8V。
0.8V約對應655個代碼值;(按5V對應12位ADC的代碼值為4095計算,1.2mV對應1個代碼值。)
此時,COMPARE_VALUE參數建議設為600(保守一點可設400)。這時可以獲得較好的靈敏度及較強的抗干擾能力。
模塊放在地圖空白區域時,CH1的電壓值,如下圖所示:
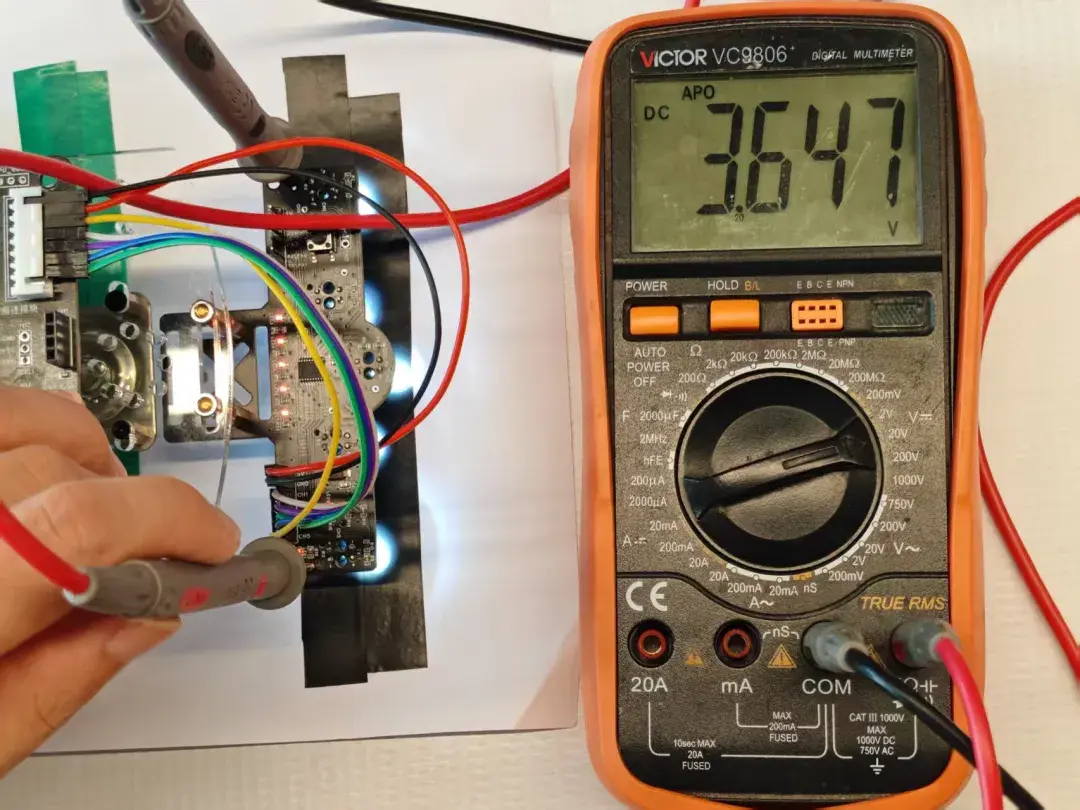
模塊對應的CHX壓在地圖的線條上,黑線的電壓值,如下圖所示:
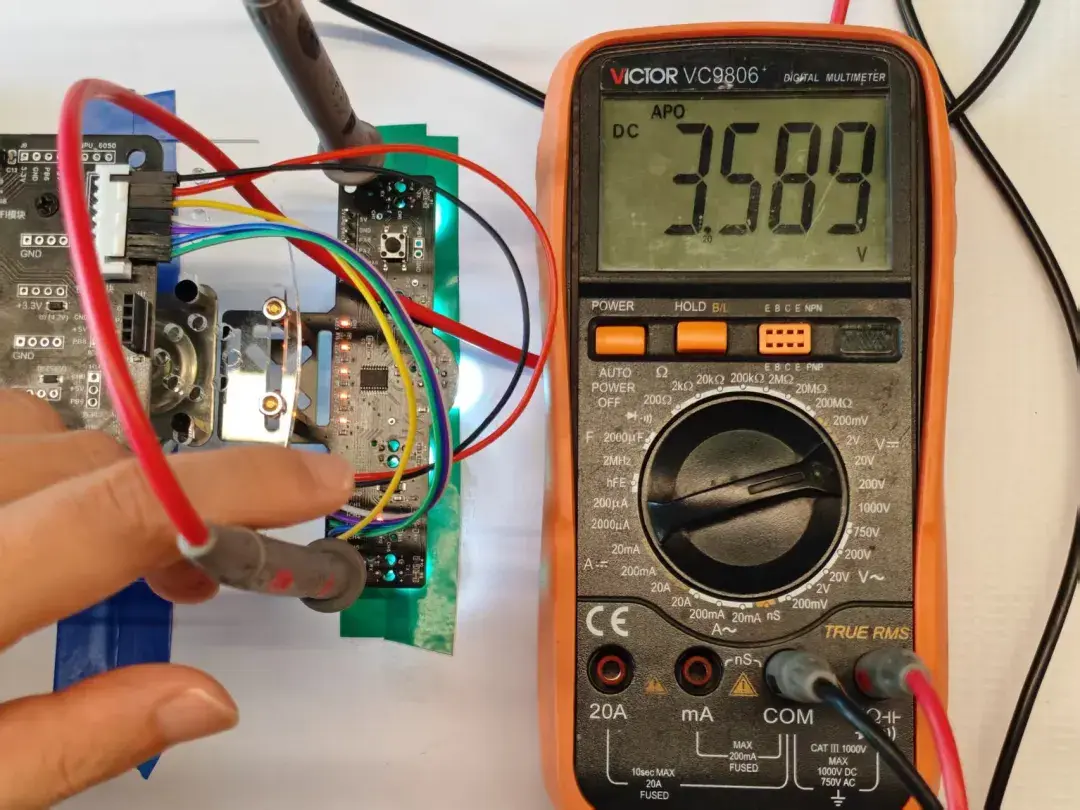
模塊對應的CHX壓在地圖的線條上,綠線的電壓值,如下圖所示:
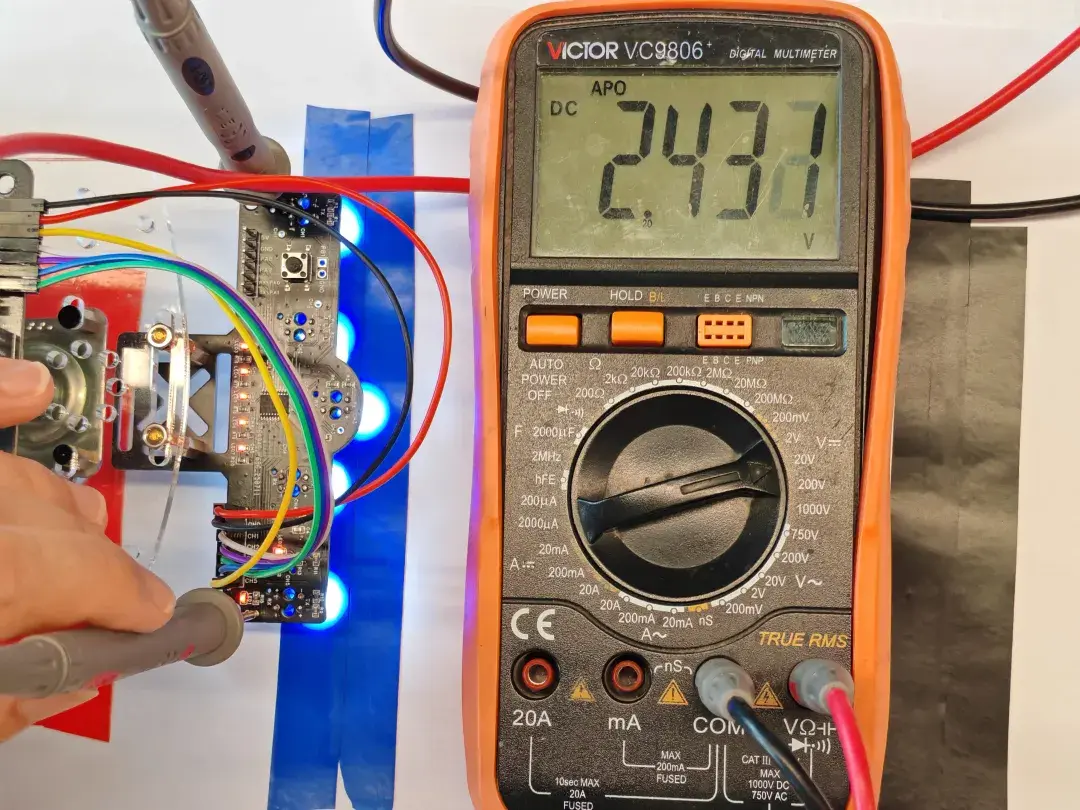
模塊對應的CHX壓在地圖的線條上,藍線的電壓值,如下圖所示:
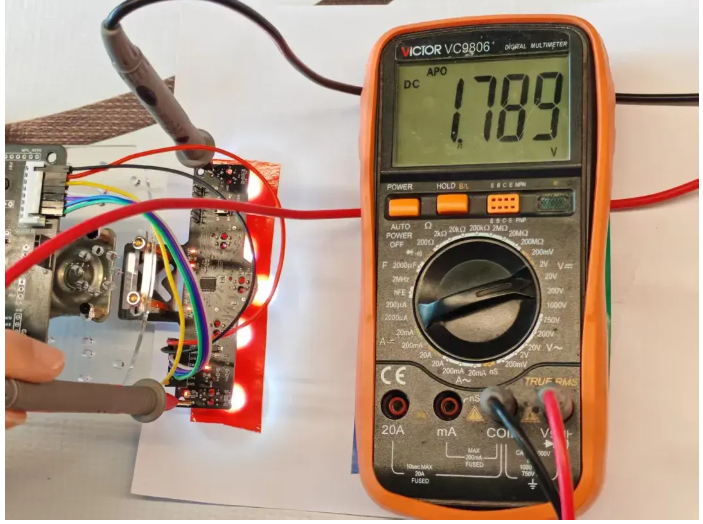
模塊對應的CHX壓在地圖的線條上,紅線的電壓值,如下圖所示:
五、資料下載及鏈接
1.百度云盤資料下載鏈接
https://pan.baidu.com/s/1QaPHRhB0Qrbj22XuxJwKEw?pwd=CW32
提取碼: CW32
-
三極管
+關注
關注
145文章
3719瀏覽量
127930 -
嵌入式
+關注
關注
5198文章
20442瀏覽量
333970 -
開發板
+關注
關注
26文章
6289瀏覽量
118043 -
CW32
+關注
關注
1文章
299瀏覽量
1843
發布評論請先 登錄

CW32量產燒錄工具

【項目展示】基于CW32的遙控循跡小車






 工商網監
工商網監
評論