 伯克利和CMU聯合開發能像人類一樣行走的腿形機器人ATRIAS
伯克利和CMU聯合開發能像人類一樣行走的腿形機器人ATRIAS

還記得波士頓動力那些靈活的機器人么,避障礙爬樓梯甚至送快遞,在各種地形隨意穿梭。
現在,加州大學伯克利分校和卡內基梅隆大學的實驗室研發出了一款更靈活的腿形機器人ATRIAS,它們可以像人類一樣可以在崎嶇的地形上行走,跨越障礙物,并且,不會受障礙物高度和相隔距離的影響。
也就是說,即使地面環境是隨機變化的,這種足式機器人也能順暢地行走。
這就非常厲害了!
對足形機器人,特別是目前還是“盲人”的機器人來說,在地面上如何“下腳”是有嚴格的算法控制的。而這些算法對凹凸不平的地面環境的適應性不是很友好。
那么設計這款機器人最大的挑戰是,如何優化離散立足點的控制算法。
如此靈活的機器人,其背后由復雜的動力學方程控制。具體來講是利用了最新的非線性控制算法。
而加州大學伯克利分校和卡內基梅隆大學做出的最新進展很好的解決這種矛盾,讓足式機器人能夠在隨機變換的障礙地形中,順暢的行走。
為什么是足式機器人?
從波士頓動力的網紅機器人Atlas,到伯克利的ATRIAS,足式機器人無疑近期機器人行列中的“C位”。這一地位的獲取是有原因的。
根據行走方式,機器人可分為輪式、足式、履帶式及混合式。輪式機器人主要適合平坦的路面,具有高速移動性能,但對復雜的地形卻無能為力;履帶式機器人能更好的適應松軟的地形,如土地,缺點是對高度落差較大的地形無能為力;足式機器人幾乎可以適應各種復雜的地形,缺點是移動速度較低,且由于重心原因容易側翻。
世界上大部分地形屬于復雜地形,對于復雜的地形足式機器人有著明顯的優勢,所以足式機器人的研究有著廣闊的發展前景。
足式機器人最值得探索的地方也正在于此——能夠在非結構化和不平整的地形上航行。
圖:ATRIAS雙足機器人用不同的步長和步高在隨機離散地形上行走
它們比輪式機器人靈活得多,輪式機器人很難在有空隙或高度有重大變化的地形上導航,而雙足機器人能夠穿越離散和不可預測的地形,這使它們成為了空間探索、災難響應以及城市環境中個人機器人的理想候選者,這些機器人需要在為人類設計的離散地形上行走,比如樓梯或跳板。
為了促進機器運動技術的進步,也有不少獎項設立,比如W獎。此獎項是對機器運動中最先進技術的挑戰,例如對臺階和樓梯的攀爬、在不超過10,000秒的時間內行駛10公里等等。
雖然這些年來,足式機器人的機械設計和控制策略有了顯著的改善,但是仍然沒有在現實世界中真正使用。目前最先進的機器人依然在準靜態地面運動速度緩慢,而且抗干擾能力弱,對能源的利用也是效率低下。
對于下肢外骨骼來說,跨越離散地帶也是一個難題,目前的解決方法是,用戶添加額外的平衡機制,比如說拐杖,但是即便這樣也不能實現完全的自主行走。這一點也在最近的Cybathlon外骨骼競賽中得到了體現。
通過設計機器人和反饋算法,使得機器人能夠以一種安全、可靠的方式在復雜的地形上實現精確的足跡設計,我們能夠將這種新的機器人應用到實際生活中,并且將這些想法轉化成增強人類能力的生物電子設備。
為什么在跳板上的動態行走這么難?
伯克利大學的混合機器人小組一直致力于為高自由度雙足機器人開發正式的控制框架,這種框架不僅能保證在離散地形上精確的步進位置,還能對不確定性和外力建模保持魯棒性。這些方法獨立于特定的機器人本身,并在RABBIT、ATRIAS和DURUS等多種機器人模型上進行了仿真測試。
此外,這些機器人提前并不能“知道”地形會是什么樣子;只有下一步的位置會顯示給機器人,這個場景很好地描述機器人在現實世界中可能遇到的情況。
伯克利研究組在ATRIAS雙足機器人平臺上測試了控制算法,并能夠實現在不同離散隨機地形上的動態行走,步長在30至65厘米不等,步行高度(抬腿)為22厘米,同時保持平均步行速度為0.6米/秒。
可以說,伯克利的ATRIAS是雙足機器人上首次,在步長和步高同時變化的跳板上,完成了動態行走。
為什么離散行走在機器人中如此困難?
首先,兩足機器人是高自由度系統,其運動由復雜的非線性微分方程控制,這些方程描述了機器人與地面相互作用中的混合動力:機器人必須通過不斷地與周圍環境進行接觸和打破接觸來與環境互動。
此外,ATRIAS是欠驅動的,這意味著它在腳踝處沒有驅動器。你可以想象一下踩著跳板或者踩著高蹺爬樓梯:保持平衡的唯一方法就是一直走下去。
跳板的問題也對腳的放置有嚴格的限制,當然在現實世界中,這些跳板也可能會倒塌(在不久的將來我們將會解決這個問題)。此外,機器人還必須在其他物理約束下工作,如電機轉矩限制和摩擦(機器人不能滑倒)。所有這些約束相互作用,使得控制設計過程變得非常重要。
跳板問題已經得到了廣泛的研究,在像Valkyrie和ATRIAS這樣的機器人身上取得了令人印象深刻的成果。但是不同的地方是,伯克利的方法允許動態行走,而不是機器人傾向于使用的緩慢的準靜態運動。
通過對系統動力學中的非線性進行推理,并利用最近最優控制和非線性控制技術的進展,伯克利小組可以在提供形式的穩定性和安全性保證的同時,以簡單緊湊的形式指定控制目標和期望的機器人行為。這意味著,這種機器人可以在離散的地形上行走,而不會滑倒或摔倒。
下一步的研究
目前,ATRIAS還是“盲人”,需要向他們提供關于它周圍環境的信息,比如下一個跳板的位置。伯克利研究組稱,他們現在正致力于在控制器中集成計算機視覺算法,比如深度分割和深度學習。
這將允許機器人對周圍環境進行推理,從而開發出一個完全自主的系統。隨著一個名叫Cassie的新機器人抵達伯克利,其計劃將實驗結果擴展到在真實世界的跳板上進行3D行走。
從長遠來看,這項研究將有助于雙足機器人在室內環境(如樓梯和狹窄的走廊)以及室外環境(如叢林小徑)中自主導航。研究的關鍵部分包括安全性、魯棒性和靈活性,也就是說,我們希望我們的機器人能夠在“正確”的位置上行走,以防止它們跌倒,同時對意想不到的外力和干擾保持魯棒性。
這種技術的潛在應用有很多:在搜索和救援中,可以部署自動人形機器人而不是人類救援人員;在探索未繪制地圖/未探索的區域時(比如在表面高度不均勻的其他行星上),或者在家中作為個人機器人。此外,為兩足機器人開發的方法也可以轉化為增強人類的機器人設備,比如下肢外骨骼。
-
機器人
+關注
關注
213文章
31079瀏覽量
222244 -
移動機器人
+關注
關注
2文章
818瀏覽量
34868
原文標題:機器人快跑!伯克利和CMU聯合開發兩足機器人,兩條細腿,一馬平川
文章出處:【微信號:CAAI-1981,微信公眾號:中國人工智能學會】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
小鵬人形機器人IRONI走“貓步”亮相,網友:太像真人!預計2026年量產
請問RT-Thread與stm32cubemx聯合開發的原理是什么?
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
材質識別MEMS超聲波傳感器賦能雙足機器人自適應行走

成都華微一行走進成都人形機器人創新中心
云深處科技利用Arm架構打造AI機器人
RDK × 腿臂機器人:這只 “機械汪” 竟會說人話、走花路!

一天吃透一條產業鏈:具身智能(AI+機器人)

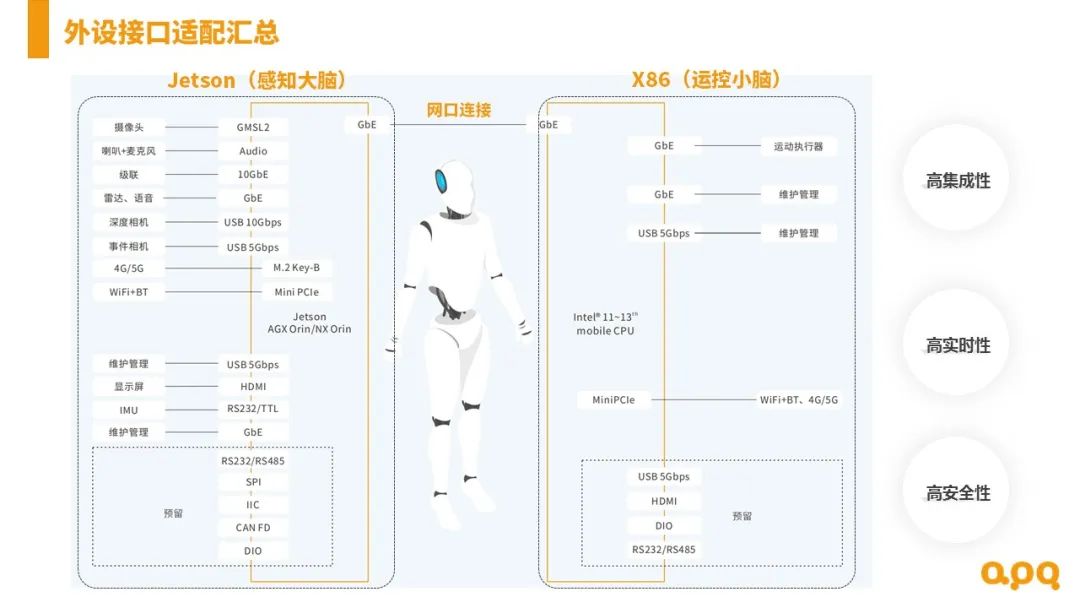
從感知到運控:具身智能機器人控制器的雙腦協同設計與場景適配
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
機器人Blue亮相 搭載英偉達最新GR00T N1人形機器人通用基礎模型



 工商網監
工商網監
評論