 使用OpenUSD實現可互操作3D工作流(下)
使用OpenUSD實現可互操作3D工作流(下)

通用場景描述簡稱OpenUSD,是一個開放且可擴展的生態系統,用于在 3D 世界內描述內容、合成數據、進行仿真和開展協作。
OpenUSD 提供基本的功能,通過在單個標準化框架中連通不同的數據、工具和工作流,助力團隊更輕松地開展復雜的項目。USD 的獨特功能包括分層式合成引擎、自定義架構、與文件系統無關的資產解析器,以及 HYDRA 渲染架構。
從本質上講,OpenUSD 不僅僅是一種格式,它還是打造未來物理 AI 所必需的靈活、開放的基礎。NVIDIA 正在與合作伙伴和開源社區密切合作,推動相關領域更快、更廣泛地采用 OpenUSD。NVIDIA 同 Pixar、Adobe、Apple 和 Autodesk 共同成立了 OpenUSD 聯盟 (AOUSD),該聯盟致力于促進 OpenUSD 的標準化和發展完善。
LycheeAI 創始人兼機器人技術教育家Muammer Bay:“OpenUSD 的 USDA 格式是連通 3D 工作流和代碼的橋梁,能夠使仿真資產易于讀取且易于實現版本化和自動化,這有助于為開發新一代由 AI 驅動的機器人技術鋪平道路。”
Muammer Bay 是 LycheeAI 的創始人,也是NVIDIA 機器人技術大使,同時還是一名杰出的仿真工程師。在他的教育類 YouTube 頻道上,他通過分享自己在機器人仿真和合成數據生成方面的專業知識,為成千上萬的工程師、研究人員和機器人技術愛好者提供幫助。他對這個領域的興趣始于在學術上對機器人技術和計算機視覺的關注,以及對電子游戲的熱情。他在使用 Isaac Replicator 研究合成數據時首次接觸到了 OpenUSD,這使他對基于仿真的機器人技術和一體化數字世界的價值產生了持久的興趣。
在接觸到 OpenUSD 之前,Muammer 發現將精準物理、實時渲染、ROS 和Python 整合到單個工作流中是一件非常困難的事情。依賴多個互不連通的工具不僅導致工作流碎片化,而且協作效率低下。
如今,Muammer 能夠利用 OpenUSD 快速構建、訓練和迭代 AI 模型,更換場景元素,并專注于教導其他人如何部署這些先進的方法。例如,GR00T Mimic工作流展示了高效且可擴展的模仿學習,它利用 OpenUSD 來管理鉸接式環境,并基于人類演示生成合成動作數據。ASCII 可讀的模塊化 USDA 格式有助于實現清晰度、版本控制和無縫代碼集成。
因此,Muammer 可以借助生成式 AI實現資產操控自動化并增強 3D 創作能力。通過采用 OpenUSD,他能夠輕松快速地構建、修改和分享復雜的鉸接式環境、傳感器裝置和機器人演示。OpenUSD 的影響力不止于提升個人工作效率,它還在重塑機器人社區開展協作、分享資產和攜手共建的方式。
Mcity 軟件工程師Darian Hogue:“OpenUSD 在幫助我們滿足NVIDIAOmniverse 的 SimReady 要求方面發揮了關鍵作用。通過使用 USD 來構建資產,我們可以確保資產組織得當、物理準確,并且與 Omniverse 仿真工作流兼容。”
Darian Hogue 在 Mcity 擔任全棧軟件工程師。Mcity 是密歇根大學開展的一項領先的研究計劃,專注于研發互聯汽車和輔助駕駛汽車技術。他致力于開發可靠的軟件工具,使研究人員和行業合作伙伴能夠驗證創新成果、分析數據并做出明智的決策,進而提升道路安全性。在開發 Mcity 測試設施的開源數字孿生期間,Darian 將 3D 資產轉換為 USD 格式,使其進入 SimReady 狀態,以便與NVIDIA Omniverse進行有效集成。
在采用 OpenUSD 和NVIDIAOmniverse 之前,高保真傳感器數據仿真非常困難。早期的模擬器不支持高保真傳感器模型,而且為 AI 訓練生成合成數據集的方式也不完善。然而,集成 OpenUSD 后極大地改變了他團隊的工作流,讓他們能夠快速迭代 SimReady 資產,通過Python SDK 實現場景管理自動化,以及更可靠地生成用于 AI 模型訓練的數據。
Darian 最喜歡的 OpenUSD 功能是 Python SDK。該功能不僅能夠讓他管理和更新場景、資產和元數據,并提供巨大的靈活性,大大加快了資產準備和自定義速度。總體而言,這些功能顯著增強了開發工作流,有助于提高效率、改善團隊之間的協作,并打造可重用性和一致性更高的數字孿生生態系統。
從照明和材料行為的精確建模,到罕見且對安全至關重要的駕駛場景仿真,OpenUSD 和NVIDIAOmniverse 讓研究人員能夠更好地復刻和分析智能汽車所面臨的現實挑戰。未來,Darian 計劃進一步改進其數字孿生,以便盡量縮小仿真與現實結果之間的差距,并幫助加速輔助駕駛技術的安全部署。
寶馬制造公司斯帕坦堡工廠結構數字專家John Mitchell:“OpenUSD 為我們提供了一種通用的數字語言;NVIDIAOmniverse 將它變成了一個能夠輔助決策的交互式平臺,讓我們可以在開始具體工作之前,就做好規劃、解決問題并進行仿真。”
John Mitchell 是寶馬制造公司斯帕坦堡工廠的結構數字專家,負責整個工廠的創新和數字化工作。他擁有超過25 年的經驗,他的很多工作都集中在數字孿生、機器人技術和沉浸式仿真上。在 2020 年首次了解到 OpenUSD 和 NVIDIA Omniverse 技術庫后,John 就倡導將其集成到寶馬的工業元宇宙平臺中。該平臺是一套數字孿生應用,能夠改變團隊在工廠車間的協作方式。
在開發和采用這些基于 OpenUSD 的應用之前,跨 CAD 模型、掃描數據和生產布局的協調工作不僅耗時,而且相互孤立。通過基于 OpenUSD 構建自己的平臺,寶馬的團隊能夠在施工開始之前,在共享的虛擬環境中模擬、直觀呈現并驗證整個設施,其中涵蓋新電池生產線、擴建的裝配車間等。通過該平臺,寶馬的團隊還能夠整合來自不同工具的數據,并支持非破壞性的分層協作:讓團隊能夠在機械、結構和機器人技術層面獨立開展工作,同時所有更改都會被保留下來,而且不會產生沖突。
借助這些基于 OpenUSD 的工作流解決方案,各個團隊將生產規劃效率提升了高達 30%,將成本高昂的實地驗證造訪減少了多達 70%,并加快了項目進度。John 正在利用 OpenUSD 拓展寶馬的能力,并基于Mega NVIDIA Blueprint構建新的解決方案,讓 AI 智能體能夠在工廠內試點測試和訓練自主系統。他積極倡導開放的標準和協作平臺,以便進一步為智能汽車制造領域的工業 AI提供強力支持。
nAurava Technologies 首席執行官Nandu Vellal:
“OpenUSD 和NVIDIAOmniverse 使我能夠通過檢測獲取傳感器數據,并將其疊加到零件的 CAD,這是其他平臺無法實現的。”
Nandu Vellal 是 nAurava Technologies 的首席執行官,在機械工程、3D 可視化和工業檢測數字化方面有超過 30 年的經驗。在產品設計和企業 IT 領域工作數十年后,他找到了構建機器人檢測解決方案這一人生使命。他的工作使他能夠將自己對解決問題的熱情傾注到能源、航空航天等領域的工業 4.0 應用中。
他在NVIDIA Isaac Sim剛推出的早期階段就首次接觸到了 OpenUSD,當時他正在尋找用于模擬檢測場景的先進工具。傳統的 CAD 系統無法支持創建交互式 3D 數字孿生。OpenUSD 和NVIDIAOmniverse 使得導入傳感器數據并將其直接疊加到 CAD 模型成為可能,并且能夠讓 NDE/NDT 檢測員更深入地了解缺陷,從而可降低認知負擔并減少對主觀猜測的需求。
此外,在工業檢測方面,缺陷尺寸、形狀和方向等問題曾經是抽象的,很難傳達清楚。現在,OpenUSD 的數據共享功能使得重要信息能夠在檢測組、維護組和產品設計組之間順利流通,從而可改善工作流中的協作、責任歸屬、透明度和效率。
OpenUSD 為可視化開啟了全新的可能:檢測員現在可以體驗由數據驅動且能夠將傳感器數據集情境化的沉浸式環境,而管理層和工程師則可以獲取關于資產健康狀況的實時交互式概覽。在行業會議上發表演講時,Nandu 會孜孜不倦地宣傳 OpenUSD,并將其比喻為粘合劑,可以將數字工程、新一代機器人技術和 AI 結合在一起,打造出強大的解決方案來優化和維護工業資產。
展望未來,Nandu 指出,OpenUSD 不僅解決了檢測難題,還作為可持續發展的基礎技術,它支持更好的規劃,減少昂貴的錯誤,并貫穿資產的整個生命周期保障其健康狀態。
-
機器人
+關注
關注
213文章
31079瀏覽量
222236 -
NVIDIA
+關注
關注
14文章
5594瀏覽量
109731 -
AI
+關注
關注
91文章
39793瀏覽量
301395
原文標題:OpenUSD 全明星:賦能物理 AI 的可互操作 3D 工作流(下)
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
NVIDIA全新開放物理AI模型和框架加速人形機器人開發
使用OpenUSD與NVIDIA Halos構建安全物理AI系統
探索TLE493D-P3XX-MS2GO 3D 2Go套件:開啟3D磁傳感器評估之旅
使用OpenUSD實現可互操作3D工作流(上)
使用NVIDIA AI Blueprint打造3D世界
【產品介紹】Altair SimLab可連接CAD的多物理場工作流

iTOF技術,多樣化的3D視覺應用
3D激光輪廓儀可實現在線3D測量和檢測

使用NVIDIA Cosmos模型提高未來智能汽車安全性
基于NVIDIA AI的3D機器人感知與地圖構建系統設計
光庭信息Kustom3D引擎登陸2025上海車展
NVIDIA助力影眸科技3D生成工具Rodin升級
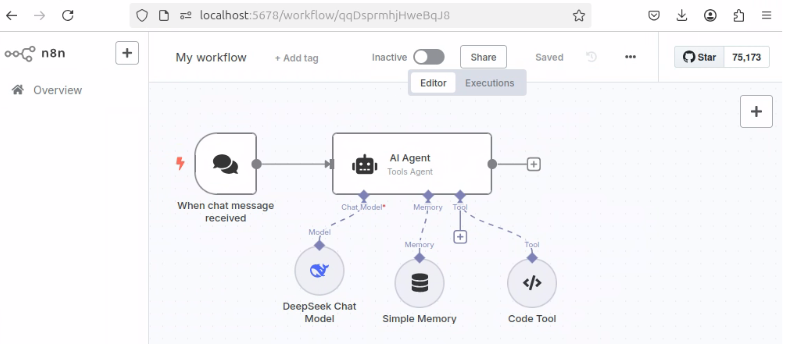
非技術人員如何用n8n + DeepSeek打造AI自動化工作流?



 工商網監
工商網監
評論