 RS485總線舵機工作原理!
RS485總線舵機工作原理!

RS485 總線舵機是一種通過RS485 通信協議實現多設備組網控制、高精度角度 / 轉速調節的執行機構,核心是在傳統舵機(驅動電機 + 減速機構 + 位置反饋)基礎上,集成 RS485 通信模塊,解決了傳統 PWM 舵機 “一對一控制、布線復雜、通信距離短” 的痛點,廣泛用于機器人、自動化設備、智能家居等場景。
要理解其工作原理,需從硬件結構和工作流程兩個核心維度拆解,同時明確 RS485 協議在其中的關鍵作用:
一、核心硬件結構:4 大模塊協同工作
RS485 總線舵機的硬件是 “執行 + 反饋 + 通信 + 控制” 的閉環系統,各模塊功能如下:
| 模塊名稱 | 核心組件 | 核心作用 |
|---|---|---|
| 1. 驅動執行模塊 | 直流電機、減速齒輪組 | 將電機的高速低扭矩旋轉,通過減速齒輪組轉化為低速高扭矩輸出,驅動舵機軸轉動到目標角度。 |
| 2. 位置反饋模塊 | 電位器(模擬)/ 編碼器(數字) | 實時檢測舵機軸的當前實際角度,將角度信號轉化為電信號(模擬電壓 / 數字脈沖)反饋給控制模塊。 |
| 3. RS485 通信模塊 | RS485 芯片(如 MAX485)、差分信號線 | 實現舵機與控制器(如 MCU、PLC)的雙向數據交互:接收控制器的 “目標角度 / 速度指令”,發送舵機的 “當前角度 / 故障狀態”。 |
| 4. 控制模塊 | 微控制器(MCU,如 STM32、AVR) | 系統 “大腦”:解析 RS485 接收的指令→對比 “目標角度” 與 “反饋角度”→輸出 PWM 信號控制電機轉動→直到角度偏差為 0(閉環控制)。 |
二、工作流程:3 步閉環控制 + RS485 通信
RS485 總線舵機的工作是 “指令接收→閉環調節→狀態反饋” 的循環過程,核心是通過RS485 協議實現多設備協同,并通過 “反饋 - 對比 - 修正” 保證精度,具體步驟如下:
1. 指令下發:控制器通過 RS485 總線發送控制指令
傳統 PWM 舵機需 “一對一” 用 PWM 信號線控制,而 RS485 總線舵機支持多臺組網(最多 32/256 臺,取決于協議),所有舵機共享 A、B 兩根差分信號線(RS485 總線),工作時:
控制器(如 Arduino + RS485 模塊)生成帶地址的指令幀(包含:目標舵機地址、指令類型(角度 / 速度)、目標值、校驗位);
指令通過 RS485 總線的 A/B 差分信號傳輸(抗干擾能力強,傳輸距離可達 1200 米);
總線上所有舵機接收指令,但僅地址匹配的舵機解析指令,其他舵機忽略(實現 “一對多” 精準控制)。
2. 閉環調節:控制模塊驅動電機達到目標角度
這是舵機 “精準定位” 的核心,基于 “反饋 - 偏差 - 修正” 的閉環邏輯:
角度對比:舵機 MCU 接收并解析指令后,獲取 “目標角度”,同時讀取位置反饋模塊(如電位器)的 “當前實際角度”,計算兩者的角度偏差(例如:目標 90°,當前 30°,偏差 60°);
電機驅動:MCU 根據偏差方向(正轉 / 反轉)和偏差大小,輸出對應的PWM 控制信號(偏差大則 PWM 占空比高,電機轉得快;偏差小則占空比低,轉得慢,避免過沖);
減速執行:電機接收 PWM 信號后轉動,通過減速齒輪組降低轉速、提升扭矩,帶動舵機軸向目標角度轉動;
偏差消除:位置反饋模塊實時將 “當前角度” 回傳給 MCU,MCU 持續對比偏差,直到偏差小于設定閾值(如 ±0.5°),此時 MCU 停止輸出 PWM 信號,電機停轉,舵機軸穩定在目標角度。
3. 狀態反饋:舵機通過 RS485 回傳工作狀態
RS485 是半雙工通信(可雙向傳輸,但同一時間只能收或發),當舵機完成角度調節后,會主動向控制器回傳 “狀態幀”,包含:
舵機地址(確認是哪臺設備的反饋);
當前實際角度(驗證是否達到目標);
工作狀態(如正常 / 堵轉 / 過載 / 低電壓,便于故障排查);
校驗位(確保數據傳輸無誤)。
控制器接收狀態幀后,可判斷舵機是否正常工作,若異常(如堵轉),可下發停止指令或調整參數,實現 “控制 - 反饋 - 異常處理” 的完整邏輯。
三、RS485 協議的關鍵作用:解決 “多機協同” 痛點
RS485 協議是總線舵機區別于傳統 PWM 舵機的核心,其優勢直接決定了總線舵機的應用場景:
多設備組網:通過 “地址區分” 實現 1 個控制器控制幾十上百臺舵機(如機器人關節需 10 + 舵機,傳統 PWM 需 10 + 根線,RS485 僅需 2 根線);
長距離傳輸:差分信號抗干擾能力強,傳輸距離可達 1200 米(傳統 PWM 舵機傳輸距離通常<10 米),適合大型設備(如自動化生產線、大型機器人);
雙向通信:不僅能下發指令,還能回傳狀態,便于實時監控和故障診斷(傳統 PWM 舵機無狀態反饋,無法判斷是否到位);
高可靠性:支持校驗位(如 CRC 校驗),可檢測傳輸錯誤,避免因信號干擾導致舵機誤動作。
四、典型應用場景(理解原理的延伸)
正因為 RS485 總線舵機的 “多機控制、長距通信、閉環精準” 特性,其應用場景集中在需要協同控制的設備:
多關節機器人(如人形機器人的手臂、腿部關節,需 10 + 舵機同步動作);
自動化設備(如流水線的機械抓手、分揀機構,需多舵機配合完成抓取 - 搬運 - 放置);
智能家居(如電動窗簾、智能門鎖的鎖舌驅動,需長距離通信且狀態反饋);
工業控制(如小型傳送帶的轉向調節、閥門控制,抗干擾要求高)。
總結:RS485 總線舵機的本質是 “傳統閉環舵機 + RS485 通信模塊” 的結合,核心邏輯是 “通過 RS485 實現多設備指令 / 狀態交互,通過閉環控制保證角度精度”,最終解決了傳統舵機 “布線復雜、控制數量少、無狀態反饋” 的局限,是多設備協同控制場景的核心執行部件。
審核編輯 黃宇
-
RS485
+關注
關注
40文章
1339瀏覽量
86127 -
舵機
+關注
關注
17文章
376瀏覽量
43303
發布評論請先 登錄
RS485和RS422靜電防護方案

工控自動化應用方案:RS485轉光纖
RS485集線器:一主兩從與兩主一從的區別

淺談RS485方案

詳解RS232和RS485接口的區別


CAN總線接口轉RS485/RS232雙向轉換器DAM-C3210 工業級

求助, 關于rs485的發送問題求解
高溫RS485收發器芯片的基本原理
RS485集線器是干什么的?支持MQTT TCP/UDP協議,雙向透傳
RS485串口服務器:雙向透傳,自動重連
開疆智能Profinet轉RS485網關連接富士電機配置案例
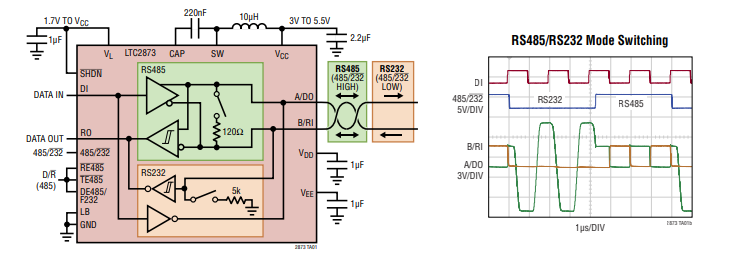
LTC2873具可通斷終端的單總線RS485/RS232多協議收發器技術手冊
為什么說RS485總線集線器、中繼器是工業通信網絡中的好幫手

工業RS485通信的收發機制介紹




 工商網監
工商網監
評論