") 邊聊安全 | 高效信息管理模塊:支持自動駕駛安全的數(shù)據(jù)庫解決方案
邊聊安全 | 高效信息管理模塊:支持自動駕駛安全的數(shù)據(jù)庫解決方案

支持自動駕駛安全的數(shù)據(jù)庫的信息存儲和處理模塊
“預(yù)期功能安全”是指不存在不合理的由預(yù)期功能不足或者人員合理可預(yù)見的誤用所導(dǎo)致的風(fēng)險。實現(xiàn)這一目標(biāo)需要符合行業(yè)標(biāo)準(zhǔn),如ISO 21448,避免SOTIF相關(guān)的危害事件。
ISO 21448標(biāo)準(zhǔn)涵蓋了感知、規(guī)劃和控制系統(tǒng)的驗證和確認(rèn),確保車輛在安全性和可靠性方面表現(xiàn)優(yōu)異。尤其是規(guī)劃算法的有效性,直接影響自動駕駛系統(tǒng)在復(fù)雜道路環(huán)境中的表現(xiàn),因此需對其進(jìn)行詳細(xì)的驗證與確認(rèn)。
為此,我們基于ISO 21448標(biāo)準(zhǔn),制定了一套針對規(guī)劃算法的驗證和確認(rèn)的數(shù)據(jù)閉環(huán)方案。該方案的核心是建立并不斷更新一個場景庫,模擬各種駕駛情境,從而提升自動駕駛系統(tǒng)的決策能力,使其能夠靈活應(yīng)對多變的路況和交通動態(tài)。
在這套數(shù)據(jù)閉環(huán)方案中,自動駕駛系統(tǒng)的決策機(jī)制依賴于全面的場景測試和驗證,實現(xiàn)高效的數(shù)據(jù)回收和再利用。為此,數(shù)據(jù)庫的信息存儲和處理模塊發(fā)揮了不可或缺的作用。該模塊不僅僅是海量場景數(shù)據(jù)的存儲載體,更是支持實時數(shù)據(jù)分析、處理和反饋的基礎(chǔ)設(shè)施。它能快速適應(yīng)不斷變化的算法需求和優(yōu)化策略,確保自動駕駛系統(tǒng)在運行過程中能夠獲取最新、最完善的場景數(shù)據(jù)支持。
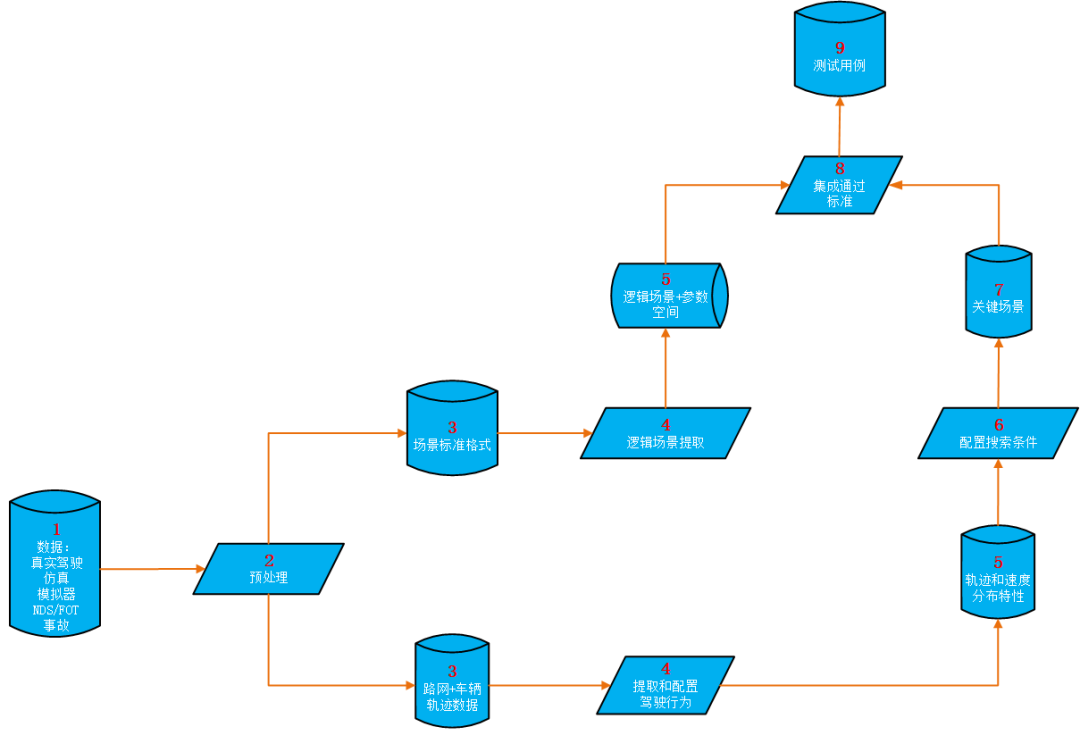
本文將深入探討該數(shù)據(jù)庫的信息存儲和處理模塊如何通過系統(tǒng)的設(shè)計和精準(zhǔn)的信息處理策略,有效支持場景庫的動態(tài)更新,從而持續(xù)增強(qiáng)自動駕駛功能的安全性和可靠性。其整體技術(shù)路線如圖所示。
01.
數(shù)據(jù)庫的信息存儲和處理模塊
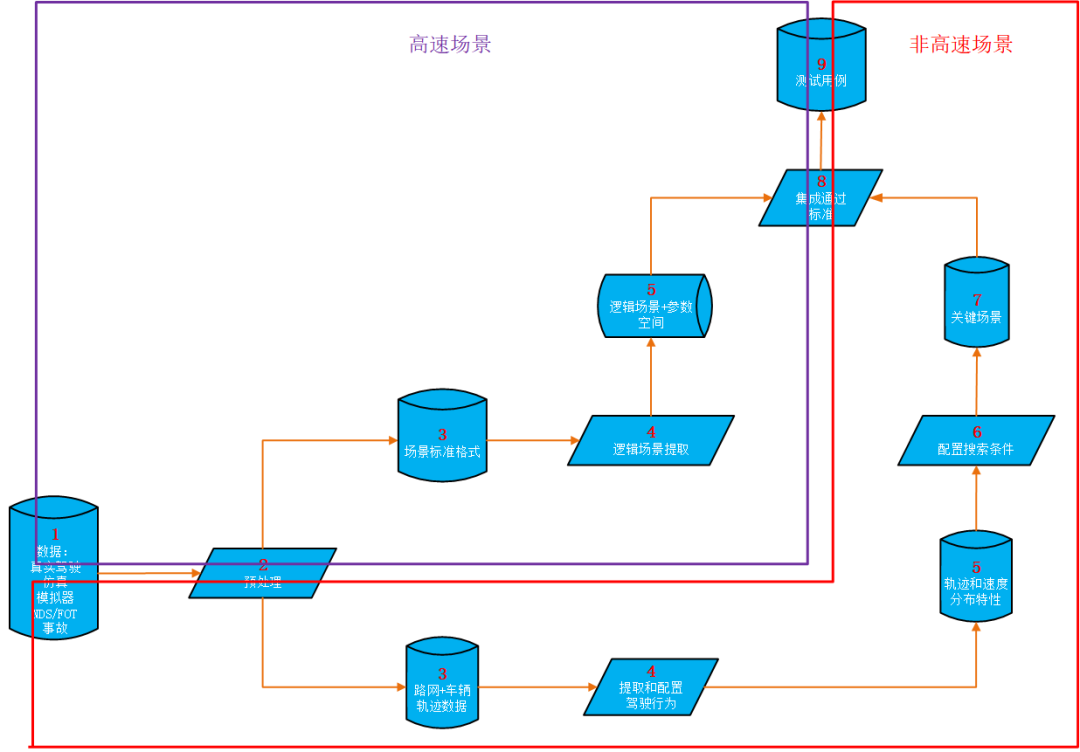
該模塊詳細(xì)展示了數(shù)據(jù)的存儲和處理流程,針對高速和非高速場景提供了全面且具體的技術(shù)路線,以確保在不同駕駛環(huán)境下的安全性和有效性。
數(shù)據(jù)存儲和處理流程概述
數(shù)據(jù)收集
圖標(biāo)(1):駕駛車輛傳感器數(shù)據(jù)收集
● 從車輛端設(shè)備多維度收集傳感器數(shù)據(jù),包括圖像(如攝像頭拍攝的路面和周圍環(huán)境)、視頻流、雷達(dá)信號等。這些數(shù)據(jù)不僅捕捉到車輛的行駛狀態(tài),還包括環(huán)境的動態(tài)變化。
●除了基礎(chǔ)的數(shù)據(jù)收集,還記錄關(guān)鍵附加信息,例如GPS坐標(biāo)、車輛速度、行駛方向、和拍攝時間,以全面反映車輛的實時性能和環(huán)境信息。
數(shù)據(jù)預(yù)處理
圖標(biāo)(2):預(yù)處理
●收到的數(shù)據(jù)經(jīng)過初步驗證后,進(jìn)行數(shù)據(jù)的拆分,形成可分析的數(shù)據(jù)集。
●在此步驟中,數(shù)據(jù)將經(jīng)歷清洗(去除噪聲和異常值)、篩選(根據(jù)興趣點過濾無關(guān)數(shù)據(jù))、提取(選擇具有特定特征的數(shù)據(jù))以及標(biāo)準(zhǔn)化處理(確保格式一致性和數(shù)據(jù)統(tǒng)一性),從而提升數(shù)據(jù)的質(zhì)量,確保后續(xù)分析的準(zhǔn)確性。
高速場景處理
圖標(biāo)(4):邏輯場景提取
●在預(yù)處理完成后,依據(jù)設(shè)定的篩選條件,系統(tǒng)從數(shù)據(jù)集中提取符合條件的特定數(shù)據(jù)片段。
●此過程中,進(jìn)行對不同場景類型的關(guān)鍵參數(shù)分析,諸如速度、加速度、車與車之間的距離等,并評估這些參數(shù)的分布范圍。這為后續(xù)模型的優(yōu)化提供了必要的支持和依據(jù)。
非高速場景處理
圖標(biāo)(4):提取和配置駕駛行為
●系統(tǒng)從車輛軌跡中提取出實際的行駛行為,結(jié)合速度分布特性,將這些信息賦予交通參與者,生產(chǎn)出更真實的交通流模型。
●這種方法使得模擬環(huán)境中的駕駛行為更貼近現(xiàn)實,便于后續(xù)的風(fēng)險評估和行為分析。
圖標(biāo)(6):配置搜索條件
●根據(jù)設(shè)定的成本函數(shù),利用最優(yōu)搜索算法快速鎖定關(guān)鍵場景。這一過程可迅速找到影響駕駛安全性和效率的核心條件,從而提高數(shù)據(jù)處理的效率和效果。
圖標(biāo)(7):關(guān)鍵場景生成
●基于前期的數(shù)據(jù)分析和提取,該模塊可以生成大量的未知不安全場景,反映潛在的安全風(fēng)險。這些場景為后續(xù)的測試和分析提供必要的基礎(chǔ)數(shù)據(jù),有助于訓(xùn)練和驗證模型。
最終集成步驟
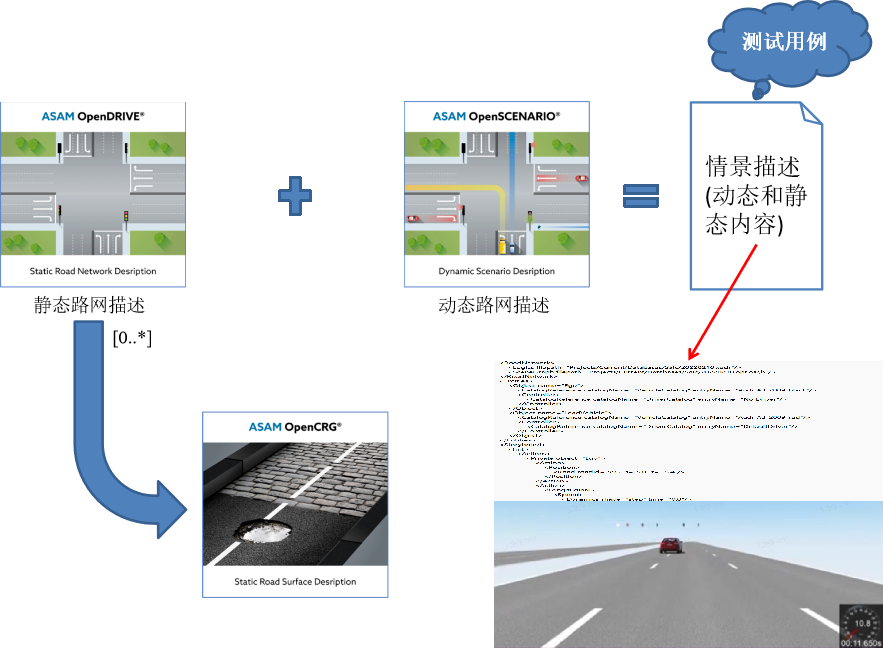
圖標(biāo)(8):統(tǒng)一標(biāo)準(zhǔn)集成
●通過上述處理步驟,系統(tǒng)完成生成的測試用例(9)以確保符合行業(yè)標(biāo)準(zhǔn),采用OpenDrive和OpenScenarios等格式進(jìn)行存儲。
●這種一致性存儲策略確保在不同測試環(huán)境下生成的測試用例能夠比較和應(yīng)用,為自動駕駛技術(shù)的推廣與驗證提供可靠支持。
通過這種詳細(xì)的數(shù)據(jù)存儲和處理流程,本模塊全面覆蓋了高速和非高速場景,為自動駕駛系統(tǒng)的開發(fā)提供了系統(tǒng)化的技術(shù)路線圖。該流程聚焦于數(shù)據(jù)的采集、預(yù)處理以及場景的提取與生成,從而為提升整車的安全性和智能化水平奠定了堅實的基礎(chǔ)。
02.
高速場景分析
在自動駕駛技術(shù)的發(fā)展中,高速場景的研究尤為關(guān)鍵。這一部分將介紹高速場景的分類與處理流程,概述如何通過多個數(shù)據(jù)源為測試提供有效支撐。
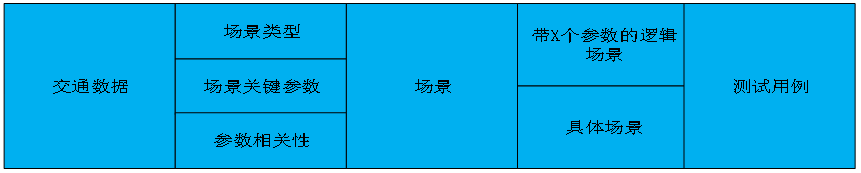
此表展示了場景的分類,包括背景和參數(shù)設(shè)置,強(qiáng)調(diào)不同的場景類型和測試用例的關(guān)聯(lián)性。
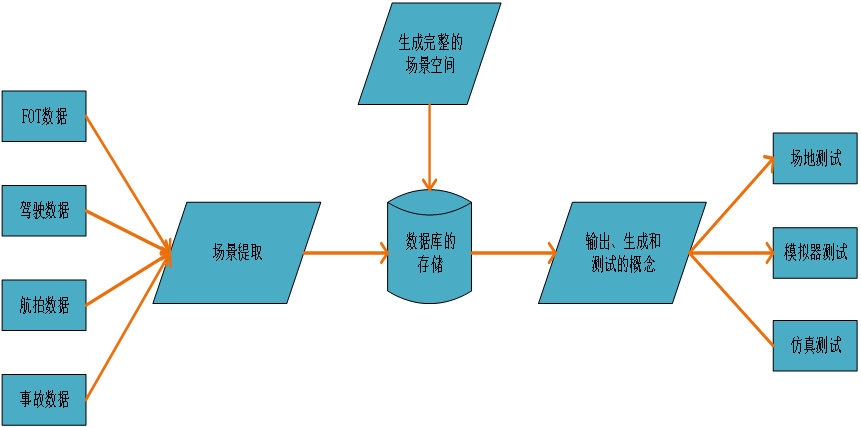
數(shù)據(jù)提取
在高速場景研究的初期,我們通過多個數(shù)據(jù)源來提取駕駛數(shù)據(jù),包括自然駕駛數(shù)據(jù)(FOT)、航拍數(shù)據(jù)、駕駛數(shù)據(jù)和事件數(shù)據(jù)。這些數(shù)據(jù)為構(gòu)建場景提供了堅實基礎(chǔ)。
數(shù)據(jù)存儲
提取的數(shù)據(jù)將被整合并存儲于專用數(shù)據(jù)庫中,這樣可以確保數(shù)據(jù)的安全性與整合性,方便后續(xù)分析。
場景生成
根據(jù)提取的數(shù)據(jù),我們將生成完整的場景空間,并使用OpenScenario文件格式保存,便于與其他系統(tǒng)進(jìn)行交互。
測試與驗證
生成的場景和測試概念將進(jìn)行多種測試,包括場地測試、仿真測試和模型測試,以驗證其可靠性和實用性。這些步驟共同支持自動駕駛系統(tǒng)的實際應(yīng)用,保證其安全性和穩(wěn)定性。
生成的測試用例格式如下:
03.
總結(jié)與展望
本文探討了自動駕駛系統(tǒng)在復(fù)雜多變環(huán)境下確保安全性和可靠性的關(guān)鍵措施。通過建立全面的數(shù)據(jù)庫信息存儲和處理模塊,我們能夠有效支持場景庫的動態(tài)更新,并持續(xù)提升自動駕駛系統(tǒng)的決策能力和適應(yīng)性。
總結(jié)
數(shù)據(jù)閉環(huán)方案:通過對高速和非高速場景的系統(tǒng)分析,構(gòu)建了一套高效的數(shù)據(jù)采集、預(yù)處理和場景生成流程。這不僅提高了數(shù)據(jù)的質(zhì)量與可用性,還促進(jìn)了自動駕駛技術(shù)的完善。
關(guān)鍵場景提取:關(guān)鍵場景的生成及測試用例的整合為后續(xù)的驗證和風(fēng)險評估提供了必要的數(shù)據(jù)支持,確保自動駕駛系統(tǒng)能夠有效應(yīng)對各種實際駕駛情境。
技術(shù)標(biāo)準(zhǔn)化:采用OpenDrive和OpenScenario等行業(yè)標(biāo)準(zhǔn)格式,保證了數(shù)據(jù)和測試用例的兼容性和可重復(fù)性,為進(jìn)一步的系統(tǒng)驗證和推廣奠定了基礎(chǔ)。
展望
持續(xù)優(yōu)化與更新:隨著技術(shù)的發(fā)展,數(shù)據(jù)庫的信息存儲和處理模塊需要不斷更新,以適應(yīng)新的算法需求和駕駛場景的變化。在未來,可以考慮結(jié)合深度學(xué)習(xí)與大數(shù)據(jù)分析技術(shù),提升數(shù)據(jù)處理的智能化水平。
跨系統(tǒng)協(xié)同:展望未來的自動駕駛測試,將會更多地與其他智能交通系統(tǒng)進(jìn)行集成與協(xié)同,形成一個更加全面、智能的交通網(wǎng)絡(luò)。需要建立開放的數(shù)據(jù)共享平臺,以促進(jìn)數(shù)據(jù)的互操作性和協(xié)同創(chuàng)新。
安全性與合規(guī)性:確保自動駕駛系統(tǒng)的安全性和合規(guī)性仍然是核心任務(wù)。未來的研究應(yīng)集中在如何利用動態(tài)更新的數(shù)據(jù)支持實時的風(fēng)險評估和決策優(yōu)化,以應(yīng)對復(fù)雜的道路環(huán)境和交通狀況。

作者
邊俊
磐時創(chuàng)始人/首席安全專家
汽車安全社區(qū)SASETECH發(fā)起人;智能網(wǎng)聯(lián)預(yù)期功能安全工作組核心成員;國內(nèi)最早從事汽車功能安全、預(yù)期功能安全的專家之一
-
數(shù)據(jù)庫
+關(guān)注
關(guān)注
7文章
4067瀏覽量
68459 -
信息管理
+關(guān)注
關(guān)注
0文章
48瀏覽量
11433 -
自動駕駛
+關(guān)注
關(guān)注
794文章
14932瀏覽量
180718
發(fā)布評論請先 登錄
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
谷歌的自動駕駛汽車是醬紫實現(xiàn)的嗎?
信息管理 Labview數(shù)據(jù)庫的基本操作
因為「不夠安全」,我們就必須拒絕自動駕駛汽車上路?
神經(jīng)網(wǎng)絡(luò)解決方案讓自動駕駛成為現(xiàn)實
高級安全駕駛員輔助系統(tǒng)助力自動駕駛
安全數(shù)據(jù)庫如何管理
如何讓自動駕駛更加安全?
智能感知方案怎么幫助實現(xiàn)安全的自動駕駛?
為何自動駕駛需要5G?
Web信息管理系統(tǒng)數(shù)據(jù)庫加密技術(shù)研究
數(shù)據(jù)庫管理系統(tǒng)層次安全技術(shù)
數(shù)據(jù)庫信息管理系統(tǒng)的邏輯架構(gòu)與功能如何進(jìn)行設(shè)計
數(shù)據(jù)庫教程之信息管理網(wǎng)絡(luò)數(shù)據(jù)庫應(yīng)用系統(tǒng)實例資料概述




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論