") 高精度地圖對于自動駕駛來說真的很有必要嗎?
高精度地圖對于自動駕駛來說真的很有必要嗎?

[首發(fā)于智駕最前沿微信公眾號]隨著自動駕駛技術(shù)的逐步落地,曾經(jīng)高度依賴的高精度地圖似乎不再火熱,行業(yè)的注意點更多轉(zhuǎn)移到了端到端大模型、AI等前沿領(lǐng)域。那高精度地圖在自動駕駛中到底承擔的是什么角色?它有哪些不可替代的作用?

什么是“高精度地圖”,它要解決什么問題?
高精度地圖不是我們手機里常用的那種導航地圖,它的設(shè)計目標是為自動駕駛系統(tǒng)提供“機器能用的、可精確定位和決策的先驗世界模型”。這類地圖要把道路從“人能看懂”的層面,提升到“車可以用來定位、預測和規(guī)劃”的層面。
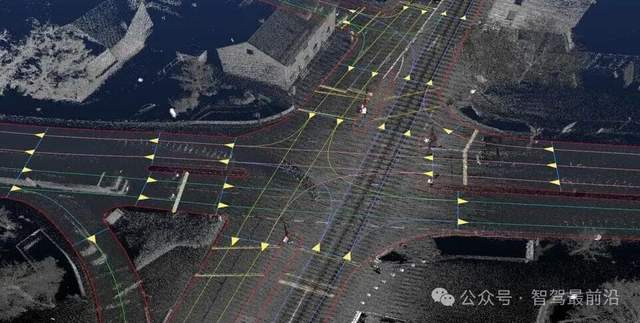
高精度地圖的坐標精度要達到米以下、通常是厘米級;語義信息要細到車道線、停止線、人行橫道、交通信號燈與其對應的受控車道、路側(cè)護欄、路沿、坡度、曲率等;同時要把道路網(wǎng)絡(luò)抽象成帶語義的拓撲圖,說明哪些車道可以直行、左轉(zhuǎn)、掉頭,哪里有強制停車、哪里有限速、線型變化等。
高精度地圖不僅包含幾何(3D點云、線、面),還包含“語義”與“規(guī)則”兩類信息,這些信息是自動駕駛在傳感器觀測受限時的重要先驗。高精度地圖是幾何層(精確的三維重建)、語義層(車道、標志、信號等)、拓撲/連通性層(lanegraph)、本地化錨點(用于精確定位)的混合體,只有將這些信息進行融合,才可以確保自動駕駛汽車“看”到更遠的路。

高精度地圖應該包含哪些“要素”?
高精度地圖需要把一條道路的“規(guī)則”和“長相”都要“寫”清楚,其需要的要素遠比普通導航地圖多得多。首先是用于精確定位的幾何基準,三維點云或精確的道路中心線與車道邊界,可以提供厘米級的位置參考,幫助車輛把傳感器感知的物體掛到地圖坐標系上,從而實現(xiàn)穩(wěn)定的位姿估計與多幀融合。

還有就是車道語義,像是車道編號、車道寬度、車道功能(轉(zhuǎn)彎車道、直行車道、公交專用等)、車道連通性(相鄰車道能否并入/換道)、以及合并點、分叉點的拓撲關(guān)系等信息,這對軌跡預測和行為決策至關(guān)重要。
再有就是如停止線、人行橫道位置、斑馬線延伸、減速帶、路緣、路沿、護欄、中央分隔帶位置、受限停車區(qū)等靜態(tài)交通設(shè)施信息。信號化信息也要映射到車道上,哪盞交通燈控制哪條車道、信號燈的位置(不是僅僅在路口附近標注一個“紅綠燈”),以及可能的信號相位和時序(如果有的話)。
除了上面說的這些,高精度地圖還會包含限速、道路曲率與坡度、路面材料、夜間照明、GPS可見性指數(shù)、常見遮擋區(qū)域(比如樹蔭會干擾傳感器)等道路屬性。
當然,有些高精度地圖還包含“歷史行為層”或“統(tǒng)計層”,用于記錄某個路段常見行人/非機動車行為、車流分布或擁堵模式,這些對于規(guī)劃器做風險評估也很有用。Waymo、Mobileye、HERE等把這些要素做成既能用于定位又能用于規(guī)劃的多層結(jié)構(gòu)。

與傳統(tǒng)導航地圖的本質(zhì)區(qū)別在哪里?
把高精度地圖和我們常用的“地圖”(例如手機導航、百度/高德地圖或OpenStreetMap)放在一起比較,差別不僅僅是“精度更高”那么簡單。傳統(tǒng)地圖的目標是解決人類駕駛者的“從A到B怎么走”的問題,它注重道路走向、路名、路口類型、POI(興趣點)、大致限速和路網(wǎng)連通性,通常精度在米級或更粗,數(shù)據(jù)更新以周/月為單位,且很多語義信息是為人呈現(xiàn)的文字與圖標。

高精度地圖的目標是“讓車知道前方幾米內(nèi)的每個東西在什么地方、如何影響決策”,因此它關(guān)注的是局部幾厘米內(nèi)的幾何細節(jié)與機器可讀的語義關(guān)系。傳統(tǒng)地圖可以告訴你“前方右轉(zhuǎn)進入X路”,但高精度地圖要告訴自動駕駛“在前方12.4米處,右側(cè)車道在0.3米處轉(zhuǎn)為右轉(zhuǎn)專用車道,停止線在13.2米處,與之對應的信號燈位于左側(cè)1.1米高,且該信號相位控制直行和右轉(zhuǎn)兩個車道”。
此外,傳統(tǒng)地圖通常為平面表示,而高精度地圖常常包含3D點云、曲率與高程信息,這些對車輛動力學與縱橫向控制很關(guān)鍵。高精度地圖的語義精細化和本地化錨點是其與普通地圖的核心差別。

與“實時生成式地圖”的區(qū)別與互補
近幾年行業(yè)內(nèi)還有另一個熱門話題是“能不能在車上實時生成地圖,把高精度地圖的工作都交給車載SLAM/感知?”實時生成式地圖(或稱為在線地圖、局部地圖、即時SLAM)是把車輛的傳感器輸出在行駛過程中拼接成即時的地圖或語義圖,并用于定位與規(guī)劃。
高精度地圖與實時生成式地圖其實有明顯的差別,“范圍與一致性”就是其中一個,車載實時地圖所覆蓋的是車輛所在的局部區(qū)域,并依賴當前觀測,它能很好應對臨時障礙(比如施工、臨時停車)和動態(tài)目標,但在全局一致性、長期靜態(tài)幾何精度和語義完整性上往往不如離線制作的高精度地圖。離線高精度地圖通過多車次、多時刻的點云與影像融合,利用后處理來消除噪聲,生成更穩(wěn)定、更完整的三維幾何和語義標簽;而在線方法在傳感器噪聲、遮擋和天氣影響下,容易出現(xiàn)位姿漂移、語義錯判或圖譜碎片化的問題。實時地圖的優(yōu)勢在于低成本和對動態(tài)變化的適應性,它不需要昂貴的外部測繪車隊或集中化更新流程,能馬上感知路上的臨時變化。
其實在實時生成式地圖與高精度地圖之間,最佳路徑不是“二選一”的問題,而是把二者當作互補,用離線高精度地圖提供高可信度的先驗(尤其在遮擋或遠距情況),同時用在線生成的地圖或感知來修正實時高精度地圖的短期變化,甚至把在線觀測回傳到云端做增量更新,形成“半實時”的地圖生態(tài)。這種混合方案也是很多廠商關(guān)注的焦點。

要不要放棄高精度地圖?
近年行業(yè)里出現(xiàn)了兩種極端的路線,一派把高精度地圖當作關(guān)鍵組件,認為它能顯著提升定位、感知魯棒性和規(guī)劃質(zhì)量;另一派在產(chǎn)品層面宣稱盡量少用或不依賴傳統(tǒng)意義上的高精度地圖,轉(zhuǎn)而依靠“純視覺/深度學習+海量行駛數(shù)據(jù)”來完成定位與決策。
之所以出現(xiàn)這兩種路線,本質(zhì)上還是從“成本與可擴展性”以及“性能與安全冗余”這兩個方面考慮。支持放棄高精度地圖的論據(jù)多集中在可擴展性,制作并保持全球范圍內(nèi)的高精度地圖的成本極高,地圖會頻繁過時(施工、臨時標識改變、道路改造等),如果能把這些信息完全交給車輛通過學習和在線感知實時判斷,就能顯著降低部署成本并提高可擴展速度。
反對放棄的人則指出,當前傳感器感知在很多極端情況(強光、夜間、雨霧、長期遮擋)下仍然不夠可靠,而高精度地圖提供的“先驗”可以彌補傳感器的盲區(qū)并提高安全余量。
其實從實際應用上來說,“完全放棄高精度地圖”這種說法并不完全準確,未來或許會朝著多種策略并存并朝著“更輕量、更動態(tài)的地圖”的方向演進。比如把高精度地圖的信息拆成“核心的長期不變信息”和“容易變動的動態(tài)信息”,只把長期信息做成離線高可信度的層,把易變信息交給在線感知與云端快速更新;還可以采用眾包/車隊采集與增量更新機制,把用戶車或服務(wù)車作為測繪前端來降低測繪成本;更可以發(fā)展更緊湊的地圖表示(例如語義圖+拓撲圖,而非完整的大體素點云),以便在帶寬受限的情況下下發(fā)關(guān)鍵先驗;還可以探索將生成模型與圖學習用于地圖補全或自動合成(Waymo的HDMapGen就是把地圖建模為可生成的結(jié)構(gòu)化表示以提高合成與仿真能力)。這些方向的改變意味著高精度地圖的“形態(tài)”會變化,但在可預見的中短期內(nèi),其“先驗價值”在多種自動駕駛場景下仍然無法被純粹依賴傳感器的方案完全替代,尤其是對安全冗余要求高的服務(wù)(像城市內(nèi)的Robotaxi服務(wù)),高精度地圖的重要性則更為顯著。

未來高精度地圖會如何發(fā)展?
未來,高精度地圖或會經(jīng)歷從“靜態(tài)、重量級”向“多層次、動態(tài)、可生成功能化地圖”轉(zhuǎn)變。離線高可信度的幾何/拓撲層會繼續(xù)存在,用于保證定位基線和仿真驗證;在線生成與眾包更新會成為常態(tài),用以處理施工、事故和臨時變化;云端會承擔更復雜的合并、糾錯與版本管理工作;同時,生成式模型與圖神經(jīng)網(wǎng)絡(luò)可能在地圖補全、語義推斷與地圖壓縮方面提供新工具。用一句簡短的話來概括就是,地圖不會被“拋棄”,而是會被“重新設(shè)計”以適應規(guī)模化部署的經(jīng)濟與安全要求。
審核編輯 黃宇
-
自動駕駛
+關(guān)注
關(guān)注
793文章
14883瀏覽量
179868 -
高精度地圖
+關(guān)注
關(guān)注
1文章
21瀏覽量
3182
發(fā)布評論請先 登錄
如何構(gòu)建適合自動駕駛的世界模型?

為什么“中間表達”對于自動駕駛來說非常重要?

自動駕駛中的“無圖”真的不需要地圖嗎?

自動駕駛BEV Camera數(shù)據(jù)采集系統(tǒng):高精度時間同步解決方案

硬件在環(huán)仿真(HIL)對于自動駕駛來說有何意義?

沒有地圖,純視覺自動駕駛就只能摸瞎嗎?

置信度驗證對于自動駕駛來說重要嗎?

高程數(shù)據(jù)在自動駕駛中有什么作用?
麥斯塔MST8011AI-21系列晶振:自動駕駛的高精度“節(jié)拍器”
從“有圖”到“無圖”再到“輕圖”,自動駕駛地圖選擇為何這么折騰?

實時生成式地圖對于自動駕駛來說有什么作用?

如何制作一張自動駕駛高精度地圖?

自動駕駛中常提的高精度地圖是個啥?有何審查要求?

為什么仿真對于自動駕駛來說非常重要?

愛普生高精度車規(guī)晶振助力激光雷達自動駕駛




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論