") 從“有圖”到“無圖”再到“輕圖”,自動駕駛地圖選擇為何這么折騰?
從“有圖”到“無圖”再到“輕圖”,自動駕駛地圖選擇為何這么折騰?

[首發(fā)于智駕最前沿微信公眾號]在手機(jī)導(dǎo)航還未出現(xiàn)的年代,很多人出行主要依靠紙質(zhì)地圖,有人希望地圖可以描述得很詳細(xì),這樣可以獲得更多的交通信息;而有人覺得靠眼睛看路牌,再問問路人會更加方便;還有一些人習(xí)慣看一些簡圖或者保留關(guān)鍵信息的手繪地圖,這樣可以更加清晰明了地獲取關(guān)鍵信息。
將這些習(xí)慣類比到自動駕駛汽車,恰好可以對應(yīng)到自動駕駛行業(yè)不可不提的地圖技術(shù),在自動駕駛技術(shù)誕生初期,高精度地圖的使用非常火熱,但隨著技術(shù)的發(fā)展,很多企業(yè)開始追求無圖的方案,直到現(xiàn)在,又有一些企業(yè)開始推出“輕圖”的技術(shù),為何自動駕駛地圖發(fā)展會如此折騰?

為什么早期自動駕駛都要“有圖”?
高精度地圖(我們常說的“有圖”)的核心價(jià)值在于它把道路上車道的精確位置、車道之間的連接關(guān)系、固定的交通標(biāo)志、路緣線、停車線等等靜態(tài)信息提前告訴了車子。這些信息可以讓車輛定位和路徑規(guī)劃的難度大幅度降低。舉個(gè)簡單的類比,如果你去一個(gè)陌生城市開車,有一張?jiān)敿?xì)的導(dǎo)航圖你就知道哪條是車道、哪條不能拐、哪兒是禁止停車的路段,開起來要省心得多。對于自動駕駛汽車來說也是一樣,把環(huán)境的一部分“固定”下來,機(jī)器只要去處理動態(tài)的那一部分(行人、其他車輛、臨時(shí)障礙),系統(tǒng)的整體復(fù)雜度和驗(yàn)證難度都會下降。高精度地圖還能在夜間或惡劣光照下彌補(bǔ)攝像頭的不足,定位精度也能達(dá)到車道級別,這對某些需要高可靠性的場景非常重要。
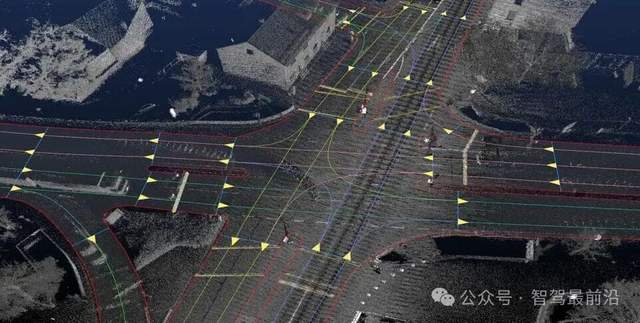
但是想要提前把“世界”畫好其實(shí)有很多問題需要解決。地圖不是一次性做完的,也很難保持最新狀態(tài),道路施工、臨時(shí)標(biāo)志、路面變更都會讓地圖信息過期,這就要求高精度地圖可以隨時(shí)更新。此外,做一張覆蓋城市乃至國家級的高精度地圖,成本會非常高,要用激光雷達(dá)、車隊(duì)采集、大量后處理和人工校驗(yàn)。如果真的能做“畫”完高精度地圖,其數(shù)據(jù)量也是非常大的,實(shí)時(shí)把它同步到每輛車需要帶寬和云端支持。正是出于這個(gè)原因,很多企業(yè)在自動駕駛落地時(shí),會思考一個(gè)問題,那就是在所有場景里都用這種“厚圖”是否劃算?

無圖思路的技術(shù)細(xì)節(jié),靠“看”和“學(xué)”來替代地圖?
面對高精度地圖的高成本,一部分企業(yè)選擇盡量少用或不用地圖,依靠車載傳感器和大規(guī)模數(shù)據(jù)訓(xùn)練來讓車輛“自己看清楚世界”。這條路的技術(shù)就對包括強(qiáng)大的攝像頭感知、穩(wěn)健的多傳感器融合、以及海量的場景數(shù)據(jù)用于模型訓(xùn)練等方面提出了要求。簡單來說,無圖方案把問題交給感知和學(xué)習(xí),讓攝像頭、雷達(dá)實(shí)時(shí)感知車道線、信號燈、行人等;讓神經(jīng)網(wǎng)絡(luò)基于歷史數(shù)據(jù)學(xué)會在各種復(fù)雜情況下做出正確判斷。
為了讓無圖方案更可靠,需要做一些工作來增強(qiáng)模型的穩(wěn)健性和可用性。比如用仿真和數(shù)據(jù)增強(qiáng)來擴(kuò)充訓(xùn)練數(shù)據(jù),針對罕見場景做專項(xiàng)收集;通過多模態(tài)融合(把攝像頭、毫米波雷達(dá)、IMU等信息融合)來彌補(bǔ)單一傳感器的短板;再輔以在線學(xué)習(xí)和車隊(duì)數(shù)據(jù)回傳,讓系統(tǒng)不斷迭代。無圖的優(yōu)勢是部署快、覆蓋范圍廣,不需要事先把每條路都畫好,特別適合希望迅速擴(kuò)展服務(wù)的公司。
無圖看起來比較適合自動駕駛技術(shù)大面積落地,但是對某些邊緣場景(比如路標(biāo)被遮擋、標(biāo)線模糊、復(fù)雜交叉口)對模型的泛化能力要求極高;端到端學(xué)習(xí)的“黑盒”特性也讓故障回溯和監(jiān)管審查變得困難。這就要求在技術(shù)落地前必須用大量測試、冗余設(shè)計(jì)和安全邊界來彌補(bǔ)這些不足,這在實(shí)踐中并不容易。

輕圖的技術(shù)實(shí)現(xiàn),只保留“關(guān)鍵骨架”?
輕圖(也叫稀疏地圖)試圖在“有圖”和“無圖”之間找到平衡。它不追求把每一塊路面、每個(gè)路樁都詳細(xì)刻錄,而是只保存對車輛決策最關(guān)鍵且變化慢的信息。輕圖通常包含車道中心線的拓?fù)潢P(guān)系、重要路口的連接信息、某些固定的交通規(guī)則點(diǎn)位和少量地標(biāo)性特征。相比全密度點(diǎn)云,輕圖的數(shù)據(jù)量小得多,更新頻率也可以更低。
生成輕圖的流程也比較工程化,先用車隊(duì)的LiDAR、攝像頭、IMU等設(shè)備采集路測數(shù)據(jù),再用視覺里程計(jì)或SLAM算法做初步配準(zhǔn),接著用自動化工具提取車道線與拓?fù)洌詈蠹由倭咳斯ばr?yàn)。為了降低維護(hù)成本,輕圖常常配合在線變化檢測機(jī)制,即行駛車輛上報(bào)與地圖不一致的區(qū)域,云端自動比對后決定是否需要人工復(fù)核或差分更新。這樣既保留了地圖對定位與規(guī)劃的結(jié)構(gòu)性支持,又把大部分更新工作交給自動化流程完成,成本更可控。
輕圖通常作為結(jié)構(gòu)化先驗(yàn)供自動駕駛汽車定位和規(guī)劃使用,實(shí)時(shí)感知負(fù)責(zé)檢測動態(tài)目標(biāo)和可變信息。比如在匝道并線時(shí),輕圖提供車道連接關(guān)系,規(guī)劃模塊據(jù)此生成安全的軌跡,而攝像頭與雷達(dá)負(fù)責(zé)實(shí)時(shí)監(jiān)測周圍車輛并進(jìn)行避讓。這種分工讓自動駕駛系統(tǒng)在保持一定魯棒性的同時(shí),避免了高精度地圖帶來的沉重運(yùn)維負(fù)擔(dān)。

地圖方案應(yīng)該如何選?
地圖方案并不沒有最優(yōu)選擇,很大程度上會取決于業(yè)務(wù)場景與商業(yè)模型。如果產(chǎn)品是限定區(qū)域內(nèi)運(yùn)行(如廠區(qū)、園區(qū)、封閉高速),投入高精度地圖并結(jié)合多傳感器冗余往往是最穩(wěn)妥的路徑,因?yàn)檫@些場景能用較少的路段覆蓋就實(shí)現(xiàn)高可用性和可驗(yàn)證性。但如果產(chǎn)品希望快速鋪開到城市乃至全國,輕圖或無圖能夠顯著降低前期投入和擴(kuò)張阻力。
未來自動駕駛地圖可能朝著“分層與融合”而不是某一路線的方向發(fā)展。地圖會做分層處理,靜態(tài)且穩(wěn)定的要素放到地圖里,變動頻繁的要素交給實(shí)時(shí)感知;地圖制作與更新也會越來越自動化,利用變更檢測、車隊(duì)數(shù)據(jù)差分和云端差分更新來降低人工成本。同時(shí),無圖路線在感知、模型驗(yàn)證以及可解釋性方面的研究會繼續(xù)推進(jìn),讓二者的邊界或?qū)⒃絹碓侥:?/p>

最后的話
地圖不是“靈丹妙藥”,也不是“多余負(fù)擔(dān)”。把地圖看成系統(tǒng)里的一個(gè)模塊,與感知、定位、規(guī)劃和驗(yàn)證體系一起設(shè)計(jì),才能在成本、可靠性和擴(kuò)張速度之間找到合適的平衡。選擇哪種地圖策略,很大程度上取決于你要解決的場景、愿意承擔(dān)的成本以及你對擴(kuò)張速度與安全邊界的偏好。短期內(nèi)我們會繼續(xù)看到各種路線并行,這不僅是技術(shù)多樣性的必然,更是行業(yè)逐步成熟前必須經(jīng)歷的復(fù)雜博弈。
審核編輯 黃宇
-
自動駕駛
+關(guān)注
關(guān)注
794文章
14947瀏覽量
180984
發(fā)布評論請先 登錄
為什么自動駕駛方案不再強(qiáng)調(diào)地圖了?

TomTom Orbis地圖將為CARIAD的自動駕駛系統(tǒng)提供支持
自動駕駛中常提的占用網(wǎng)絡(luò)檢測存在哪些問題?
自動駕駛端到端為什么會出現(xiàn)黑盒現(xiàn)象?

Transformer如何讓自動駕駛大模型獲得思考能力?
自動駕駛中的“無圖”真的不需要地圖嗎?

隱式地圖:自動駕駛的“數(shù)字直覺“

從高精地圖到輕地圖,再到“無圖”,誰才是真需求?

什么樣的地圖在自動駕駛中才能稱為“輕圖”?

端到端自動駕駛相較傳統(tǒng)自動駕駛到底有何提升?

實(shí)時(shí)生成式地圖對于自動駕駛來說有什么作用?

如何制作一張自動駕駛高精度地圖?

為什么自動駕駛端到端大模型有黑盒特性?

自動駕駛中常提的高精度地圖是個(gè)啥?有何審查要求?

2025年的自動駕駛技術(shù)有哪些升級?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論