 激光頻率梳 3D 輪廓測量 - 油路板的凹槽深度和平面度測量
激光頻率梳 3D 輪廓測量 - 油路板的凹槽深度和平面度測量

一、引言
油路板作為液壓系統核心部件,其凹槽深度與平面度精度直接影響油液流動特性與密封性能。傳統測量方法在面對復雜油路結構時存在效率低、精度不足等問題。激光頻率梳 3D 輪廓測量技術憑借時頻基準優勢,為油路板關鍵參數測量提供了新路徑,其在微米級精度控制場景中展現出獨特應用價值。
二、測量系統工作原理
(一)激光頻率梳的光程測量機制
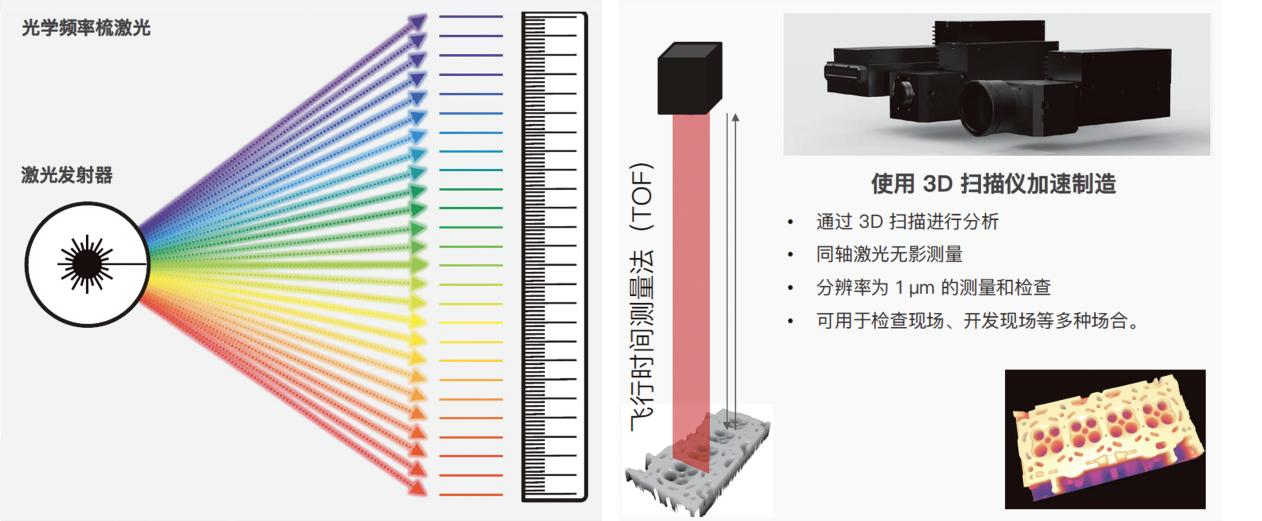
飛秒激光器產生重復頻率穩定(f_rep=100MHz)的脈沖序列,經光纖分束后分為測量光與參考光。測量光聚焦于油路板表面,反射光與參考光在平衡探測器產生干涉,其相位差 Δφ 與光程差 ΔL 滿足 ΔL=λ?Δφ/(4π)(λ 為中心波長 1550nm)。通過鎖定載波包絡偏移頻率(f_ceo=20MHz),將光程測量不確定度控制在 ±0.15μm,為凹槽深度絕對測量提供基準。
(二)三維輪廓重建算法
采用多線激光掃描模式,線激光器(波長 635nm)以 45° 角投射到油路板表面,工業相機(分辨率 2048×2048)同步采集變形條紋。通過頻率梳的飛秒脈沖對條紋圖像進行時間戳標記(精度 10ps),建立全局時間坐標系。利用相位解包裹算法(如質量引導法)計算條紋相位分布,結合頻率梳光程數據,通過三角測量原理解算凹槽深度 h 與平面度偏差 δ:
h = frac{L_1 - L_2}{costheta}, quad delta = max(z_i) - min(z_i)
其中 L1、L2 為凹槽底部與開口處光程,θ 為激光入射角,zi 為平面采樣點高度值。
(三)油路板專用測量流程
針對油路板多孔道、深凹槽特性,系統采用分層掃描策略:首先通過低分辨率掃描(點間距 0.5mm)構建全局形貌,識別凹槽位置;然后對感興趣區域進行高分辨率掃描(點間距 10μm),掃描速度隨凹槽深度自動調節(深度 > 10mm 時速度降至 20mm/s)。數據處理時,通過閾值分割提取凹槽區域,采用最小二乘法擬合平面度,結合頻率梳的絕對坐標溯源,實現凹槽深度與平面度的一體化測量。
三、技術優勢
(一)超高測量精度與重復性
在 10mm 深凹槽測量中,頻率梳光程基準使深度測量不確定度達 ±0.3μm,平面度測量分辨率達 0.1μm/m。某航空發動機油路板實測數據顯示,該技術對 5mm 寬、8mm 深凹槽的深度測量偏差 <0.5μm,較傳統接觸式測針(偏差> 5μm)提升 10 倍;平面度測量結果與三坐標測量機(CMM)一致性達 98.7%,標準偏差 < 0.2μm。
(二)復雜結構適應性
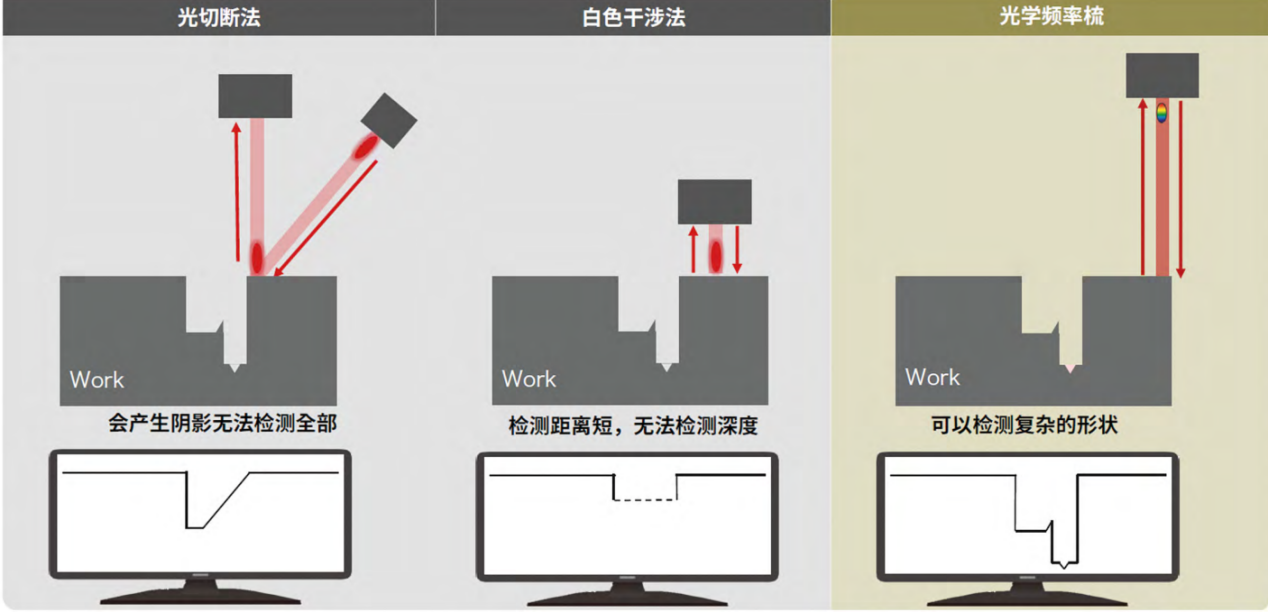
對于交叉孔、盲孔等復雜油路結構,系統通過多角度掃描(最大俯仰角 ±75°)結合頻率梳的長相干長度(可調至 50mm),實現凹槽底部 100% 覆蓋。在 φ3mm 通孔連接的 T 型槽測量中,傳統激光三角法因陰影效應存在 20% 盲區,而該技術通過 0.1mm 步距分層掃描,盲區占比 < 1%,成功獲取槽底圓角半徑(測量值 R0.25mm,真值 R0.23mm)。
(三)非接觸測量與高效數據采集
非接觸測量模式避免了測針接觸引起的油路板表面損傷,特別適合硬質陽極氧化涂層(厚度 50μm)的油路板檢測。系統單點采集時間 10μs,100mm×100mm 區域掃描僅需 3 分鐘,數據采集效率是 CMM 的 20 倍。配合自動聚焦功能(響應時間 50ms),可快速完成不同深度凹槽的連續測量,滿足批量生產質檢需求。
四、技術局限性
(一)深窄凹槽測量盲區
當凹槽寬深比 <1:5(如 1mm 寬、5mm 深)時,激光入射角度受限(θ<20°),導致三角測量基線縮短,深度測量誤差增大(>±2μm)。某液壓閥塊中 0.8mm 寬、6mm 深的阻尼槽測量顯示,槽底測量誤差達 ±3.2μm,需結合顯微視覺輔助定位。
(二)高反光表面測量挑戰
油路板電鍍金表面(反射率 > 90%)會導致激光散斑噪聲增強,干涉信號對比度下降至 30% 以下,相位解算誤差增加 50%。實驗表明,未處理金表面的平面度測量標準差達 0.8μm,而噴涂 0.5μm 厚顯影劑后,標準差降至 0.3μm,但增加了測量工序與成本。
(三)數據處理效率瓶頸
高分辨率掃描(點云密度 100 點 /mm2)產生的海量數據(單工件數據量 500MB)需專用 GPU 加速處理,三維重建時間達 15 分鐘,難以滿足實時在線檢測需求。在汽車油路板生產線(節拍 2 分鐘)應用中,需壓縮點云密度至 20 點 /mm2,導致深度測量精度下降至 ±1μm
激光頻率梳3D光學輪廓測量系統簡介:
20世紀80年代,飛秒鎖模激光器取得重要進展。2000年左右,美國J.Hall教授團隊憑借自參考f-2f技術,成功實現載波包絡相位穩定的鈦寶石鎖模激光器,標志著飛秒光學頻率梳正式誕生。2005年,Theodor.W.H?nsch(德國馬克斯普朗克量子光學研究所)與John.L.Hall(美國國家標準和技術研究所)因在該領域的卓越貢獻,共同榮獲諾貝爾物理學獎。?
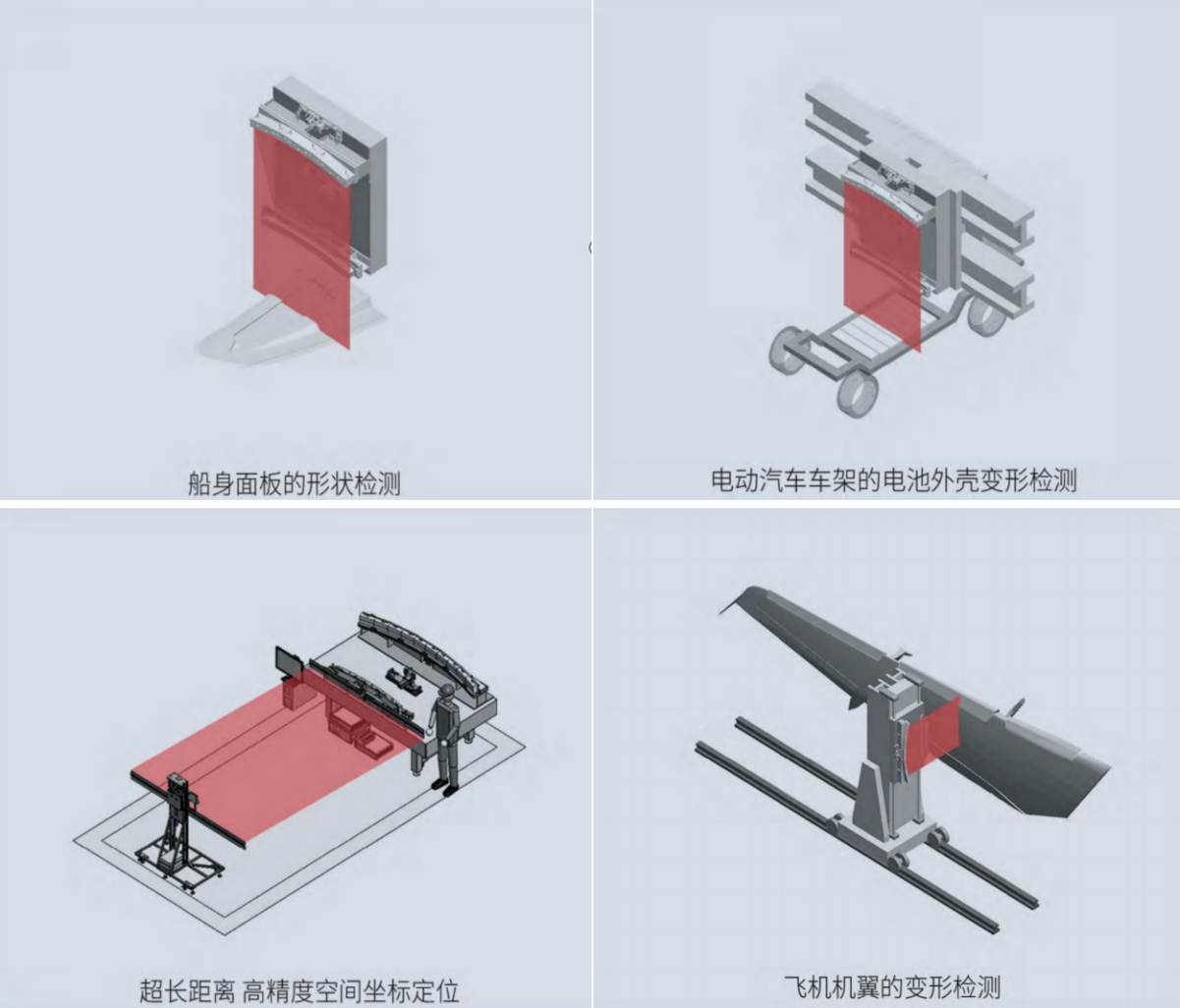
系統基于激光頻率梳原理,采用500kHz高頻激光脈沖飛行測距技術,打破傳統光學遮擋限制,專為深孔、凹槽等復雜大型結構件測量而生。在1m超長工作距離下,仍能保持微米級精度,革新自動化檢測技術。?
核心技術優勢?
①同軸落射測距:獨特掃描方式攻克光學“遮擋”難題,適用于縱橫溝壑的閥體油路板等復雜結構;?
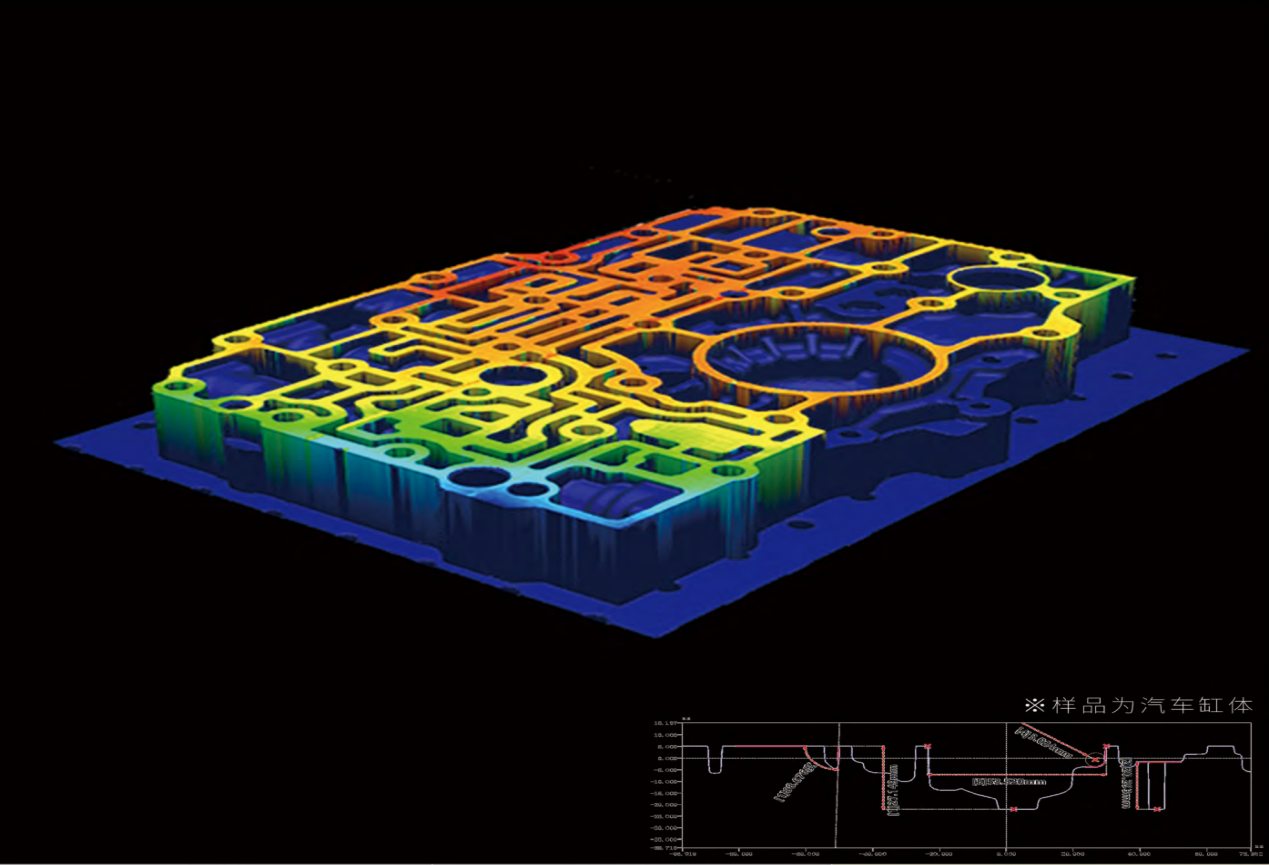
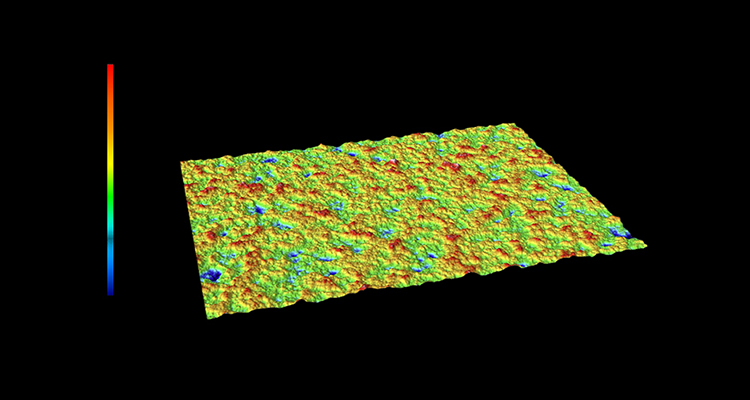
(以上為新啟航實測樣品數據結果)
②高精度大縱深:以±2μm精度實現最大130mm高度/深度掃描成像;?
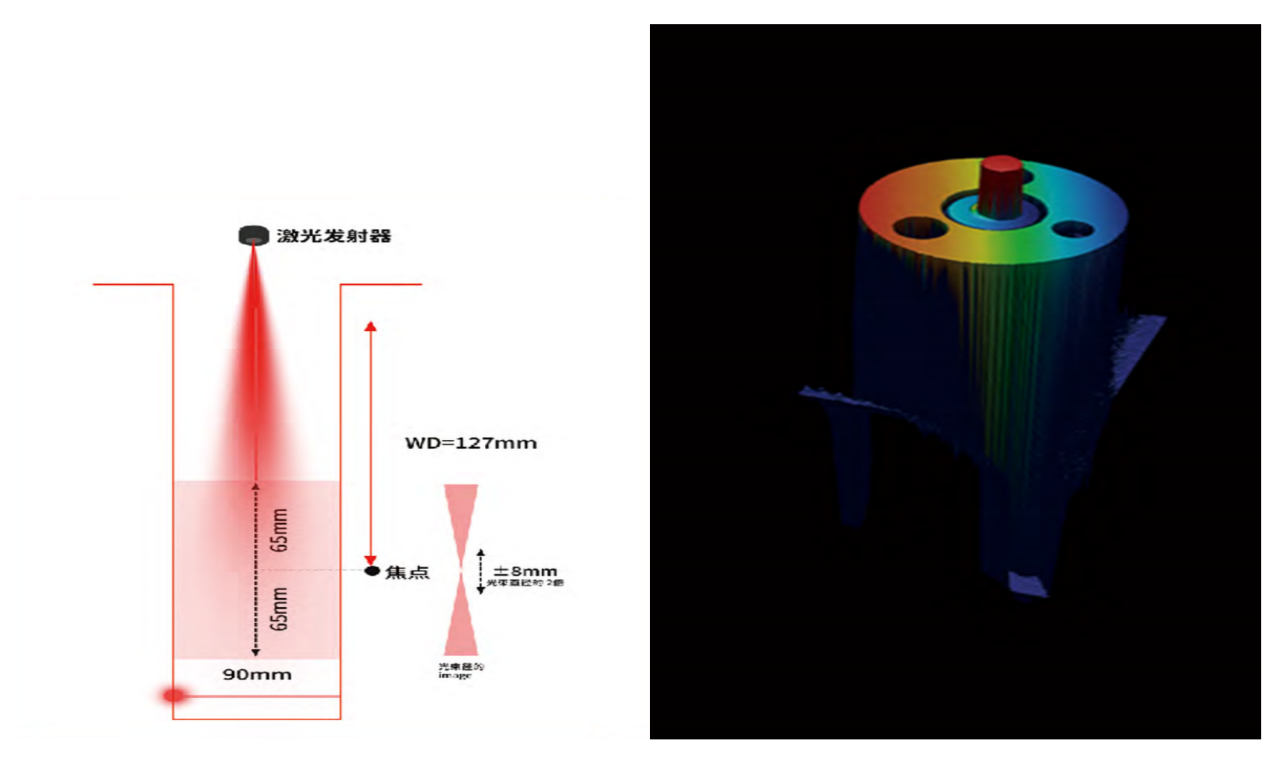
(以上為新啟航實測樣品數據結果)
③多鏡頭大視野:支持組合配置,輕松覆蓋數十米范圍的檢測需求。
(以上為新啟航實測樣品數據結果)
審核編輯 黃宇
-
激光器
+關注
關注
19文章
2994瀏覽量
64760 -
激光掃描
+關注
關注
0文章
122瀏覽量
12091
發布評論請先 登錄
深地鉆探用鉆桿深孔孔深光學3D輪廓測量-激光頻率梳3D輪廓技術
燃料電池電堆極板流場深孔孔深3D輪廓測量-激光頻率梳3D輪廓技術
PLC平面光波導的圖形凹槽深度測量-3D白光干涉儀應用

特種爆破裝置傳爆深孔孔深光學3D輪廓測量-激光頻率梳3D輪廓技術
白光干涉儀在晶圓深腐蝕溝槽的 3D 輪廓測量
LMI Gocator 6300系列智能3D線激光輪廓傳感器介紹
白光干涉儀在肖特基二極管晶圓的深溝槽 3D 輪廓測量
半導體封裝模具導通孔孔深光學 3D 輪廓測量 - 激光頻率梳 3D 輪廓技術
3D 線激光輪廓測量儀在手機中框檢測的應用:細節深化與技術解析

起落架深孔型腔內輪廓的檢測探究 - 激光頻率梳 3D 輪廓檢測
新品速遞 | Teledyne Dalsa推出Z-Trak? Express 1K5 3D激光輪廓儀系列

立式數控深孔鉆的工藝及光學檢測方法 —— 激光頻率梳 3D 輪廓檢測
光子精密雙目3D線激光輪廓測量儀,擺脫視覺盲區,1臺更比2臺強!



 工商網監
工商網監
評論