 DIY 流體模擬吊墜(一):理論與第一個吊墜的制作
DIY 流體模擬吊墜(一):理論與第一個吊墜的制作

“作者手工打造了一款獨特的鍍金吊墜,它內置了一塊定制設計的電路板,能夠實時運行流體模擬。文章記錄了從復雜的軟件實現、電子設計到精細的金工和組裝的整個過程。”
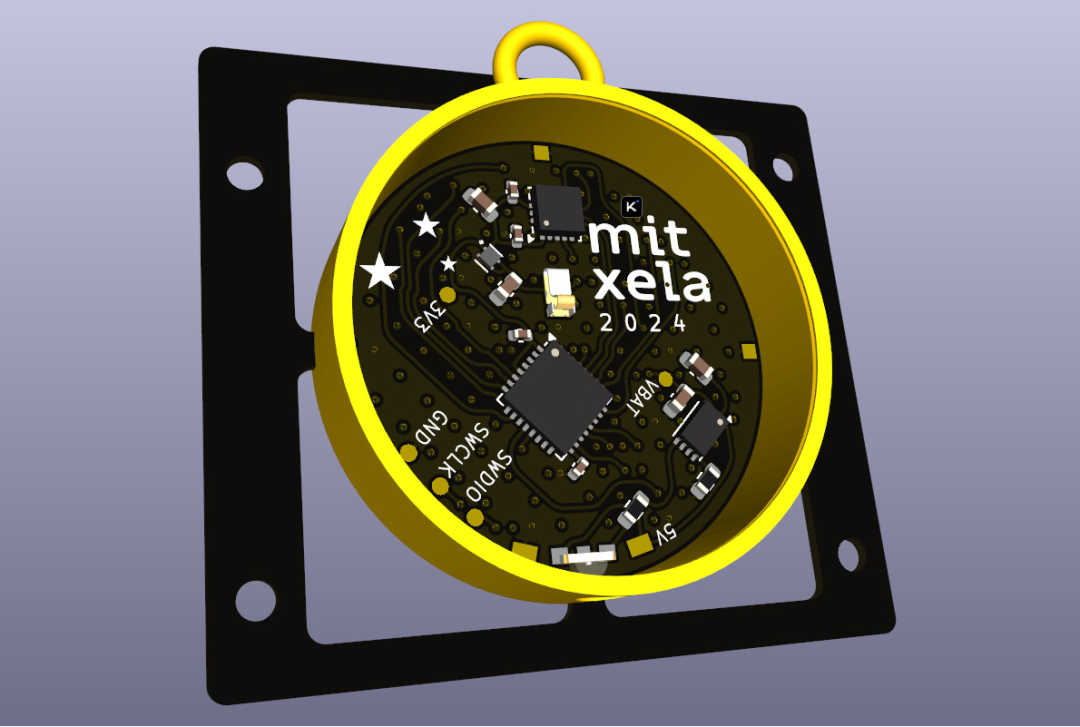
我打造了一款流體模擬吊墜,這是一件能夠實時運行 FLIP 流體模擬的手工珠寶。外殼鍍金,顯示屏由一片表鏡保護。
觀看以下視頻,您可以了解整個設計與制作過程:
簡介
我一直想實現一個實時的流體模擬程序,最終目標是創造一個 3D 虛擬雪花球。這個項目已經取得了一些進展,但在此過程中,構思了Simsim(https://mitxela.com/projects/simsim)這個概念,而眼前的這個吊墜正是基于它制作的。
在制作過程中,我涌現出了一系列很酷的想法,并由此衍生出好幾個其他項目。可以說,這個吊墜是它們的“起源”。它不僅關乎流體模擬本身,還帶來了一些意想不到的收獲,比如“對角線查理復用”這種顯示驅動方式的巨大優勢。
技術概述
FLIP 模擬基于 Matthias Müller 的工作,可以看看他的網站Ten Minute Physics:
https://matthias-research.github.io/pages/tenMinutePhysics/index.html
特別是“如何編寫一個 FLIP 水模擬器”教程。
我的流體模擬不是直接移植,而是遵循教程的重新實現。
硬件方面,我使用了一顆 STM32L432KC(帶 FPU 的ARM Cortex-M4,超頻至100MHz)、一個 ADXL362 超低功耗加速度計、一個用于 LiR2450 電池的 MCP73832 充電控制器、一個 TPS7A02 穩壓器(功耗極低)和一個TPS3839監控器。所有這些都集成在一塊0.8mm厚的四層PCB上。
這個項目的主要技術亮點如下:
與傳統的矩陣布線相比,對角線查理復用布線所需的過孔數量減少了一半。對于小間距的LED顯示屏來說,過孔數量往往是設計的瓶頸,所以這一改變意義重大。這種排列方式還將同一網絡的LED引腳端對端地放置,因此即便出現焊橋也不會影響性能。考慮到這一點,我們甚至可以故意將LED排得更緊密。
利用DMA的循環模式,可以零開銷地驅動一個顯示矩陣。通過巧妙地處理兩個DMA數據流,這種方法同樣可以零開銷地驅動查理復用矩陣。
雖然需要一個查找表來將LED映射到對應的像素位置,但這也意味著改變映射關系沒有任何額外成本。換句話說,我們可以將矩陣的任何信號線連接到微控制器端口的任意引腳上。這使得PCB布線變得出奇地簡單,盡管有些非主流。
直接用GPIO驅動大尺寸顯示屏通常會遇到亮度不足的問題,因為輸出FET的導通電阻限制了電流。但查理復用在任何時刻都只點亮一個像素,這意味著導通電阻的影響被消除了,因為它只會均勻地調暗所有像素。你甚至可以通過改變芯片的供電電壓來控制整個屏幕的亮度。借鑒這個思路,我們可以通過強制每次只點亮一個像素(而不是一整行)來解決傳統矩陣的亮度問題。通常這會增加驅動顯示屏的開銷,但如果完全由DMA處理,這個開銷也就迎刃而解了。簡直太酷了!
編寫流體模擬器
再次說明,我參考了“Ten Minute Physics”的教程,但為了真正理解其原理,我盡量不直接看源代碼,而是自己重新實現了一遍。這是一段非常有趣的經歷。 在歐拉流體模擬中,流體的運動是通過一個叫作“平流”(advection)的過程來實現的。但在FLIP算法中,我們省略了這一步,轉而讓粒子的運動來帶動流體。
視頻里有些地方沒有講得足夠詳細,比如粒子碰撞。最初我并沒有費心去實現哈希網格(hashgrid),因為一開始是在臺式機上開發的,這屬于可以留到后面再做的優化。但即便使用樸素的碰撞檢測,當粒子碰撞時究竟發生了什么?它們會被一個與距離成反比的脈沖推開,但模擬的穩定性取決于這個脈沖是否恰到好處。這與求解不可壓縮性時,那個“過松弛”步驟能奇跡般地修正結果非常相似。我確實有過一個疑問:既然我們已經求解了不可壓縮性,并且歐拉網格的速度會反饋給粒子,那為什么還需要單獨處理粒子間的碰撞呢? 事實證明,如果沒有碰撞這一步,整個流體就會坍縮成一團混亂的重疊物,所以這一步絕不是多余的。
哈希網格有不小的開銷(無論是計算上還是腦力上)。在我最終的代碼里,我設置了一個開關,可以在樸素碰撞和哈希網格碰撞之間切換。即便是在8x8這樣微小的尺寸下,兩者的區別也十分顯著,哈希網格算法帶來了明顯的提速。
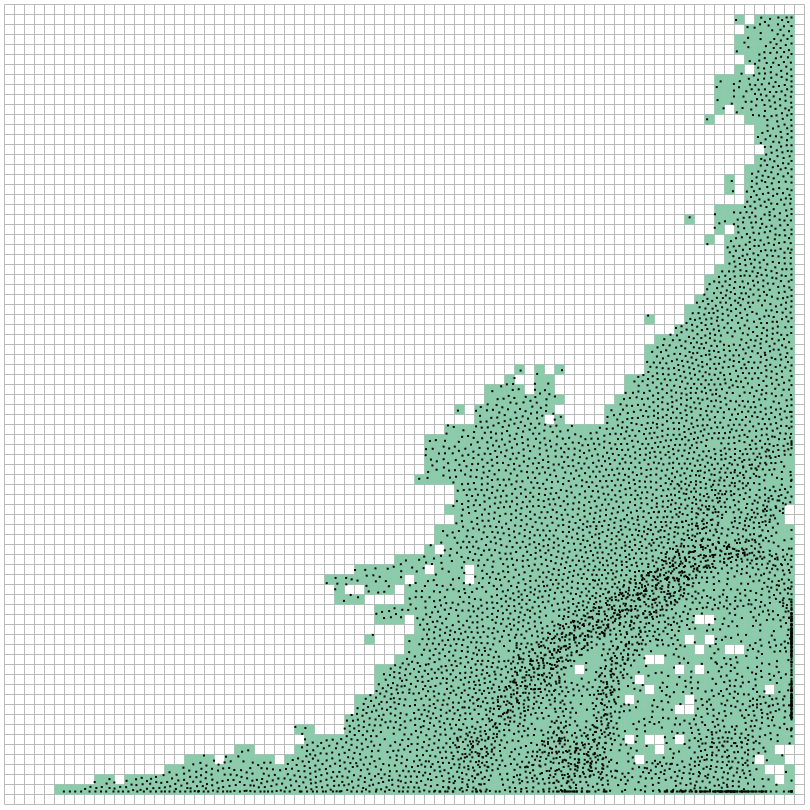
在此過程中,我創造了大量奇怪的、不完全算是流體的模擬效果。當粒子被渲染出來時,它們中的大多數看起來都像是各種各樣的青蛙卵。我收集了一堆當時的怪異截圖,現在已經忘了具體是怎么回事了,比如我已經不記得是什么導致了這個甜甜圈的出現……
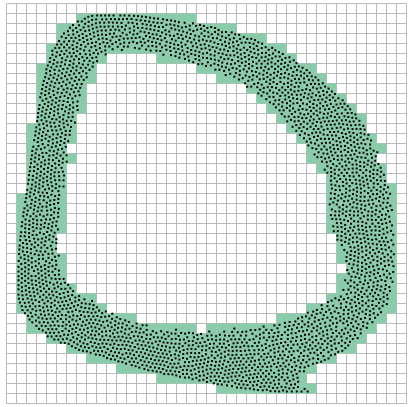
“Ten Minute Physics”的示例代碼在左邊界的邊界條件上有一個小 bug,導致流體永遠無法靜止。當邊界條件正常工作后,整個流體和粒子團塊仍然不會完全停止運動(因為除了墻壁之外沒有粘度或摩擦力),但它確實會以一種讓我想起晶體結構的方式凝結,通常在規則排列的粒子群之間出現位錯或晶界。這是一張早期的截圖:
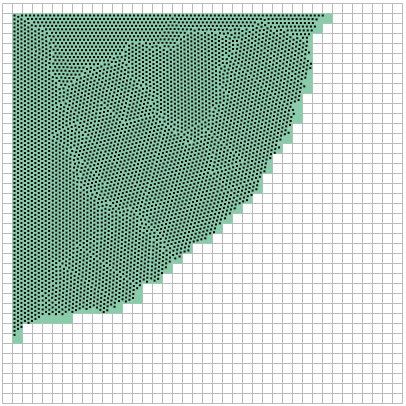
我們看到當流體被推入一個角落時,出現了一種類似三角力量(triforce)的形狀:
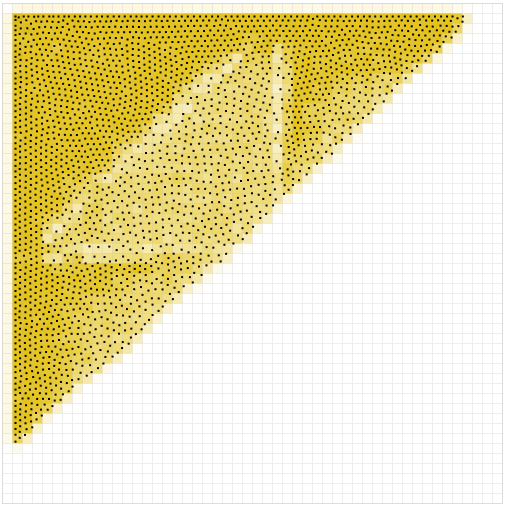
黃色的圖是粒子密度圖(即每個網格單元中重疊的粒子數量),這幫助我創造了一些非常酷的可視化效果。如果我們將流體聚集到一個角落,然后突然將重力方向改為指向另一個角落,當流體撞擊墻壁時,我們會得到一個沖擊波。
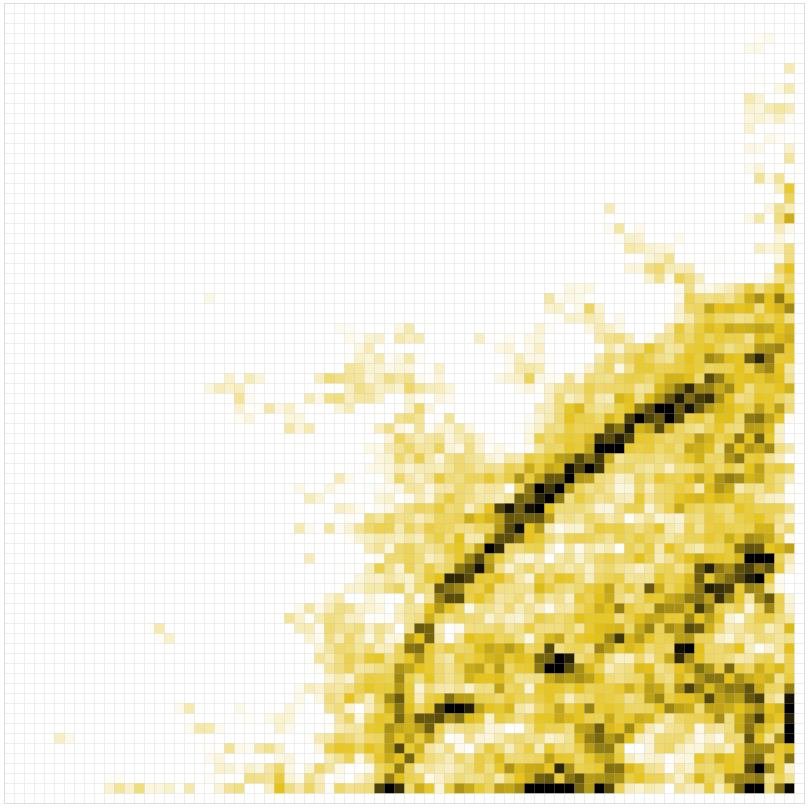
這個效果只持續一兩幀,眨眼即逝,但我發現那個由密集粒子組成的圓形波紋是一種非常賞心悅悅目的效果,特別是因為它是從 FLIP 算法的規則中自然涌現的。如果你在恰當的時刻定格畫面,你甚至可以直接在粒子的位置上看到沖擊波。下面這張圖中,我剛好錯過了角落,兩個相互競爭的沖擊波正在傳播:
在發布Simsim概念后不到兩周,我制作了Simsimsim演示程序。它相當于一個內部測試工具,用來驗證我們可以將LED的密度降低到什么程度,而它看起來仍然像流體。

它還讓我大致估算出了當我們將程序移植到裸機上時需要多少內存。很多問題都可以通過增加查找表來解決,但隨著模擬直徑的增加,所有這些表格所需的內存會呈爆炸式增長。STM32L432KC 有 64KB 的內存,不算多,但一個直徑為 16 的模擬只需要 26KB。盡管如此,這絕對是在投入硬件制作前值得確認的事情。
第一個吊墜的制作
在開始設計PCB之前,我必須說服自己,查理復用顯示屏的方案是可行的。市面上有很多查理復用顯示屏的布線方案。我找到了關于一種叫作“twistyplexing”排列方式的資料,它為手工焊接電路做了優化。但隨著對角線交叉布線方案的優勢逐漸顯現,我開始產生懷疑,覺得有必要先做一個能工作的原型出來。
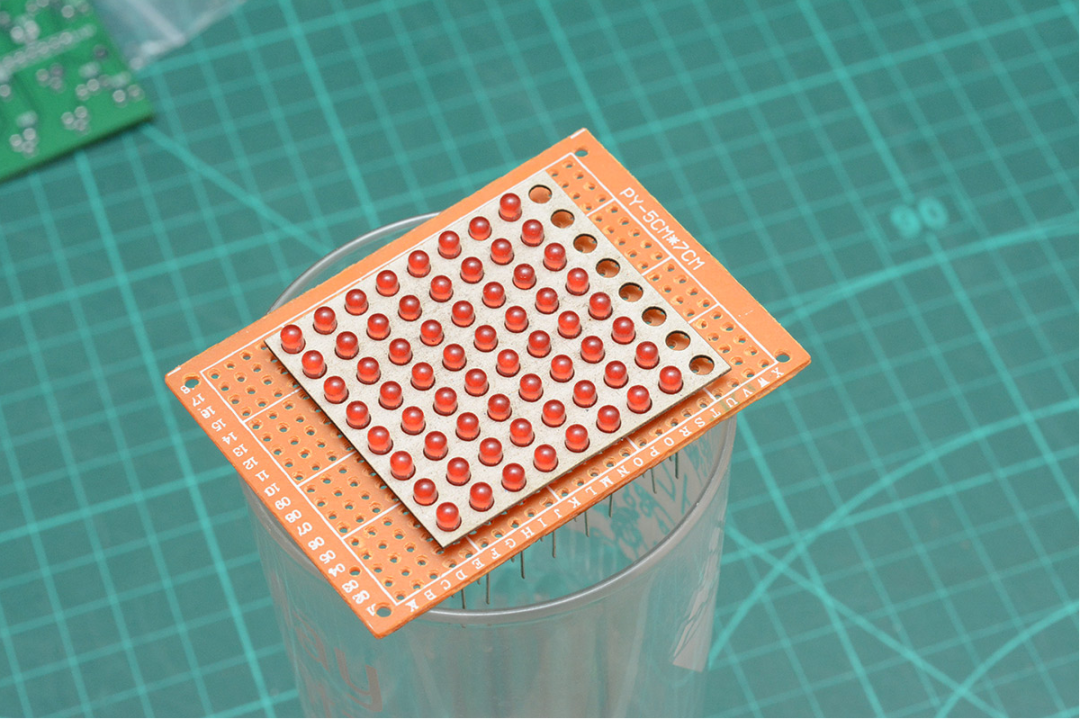
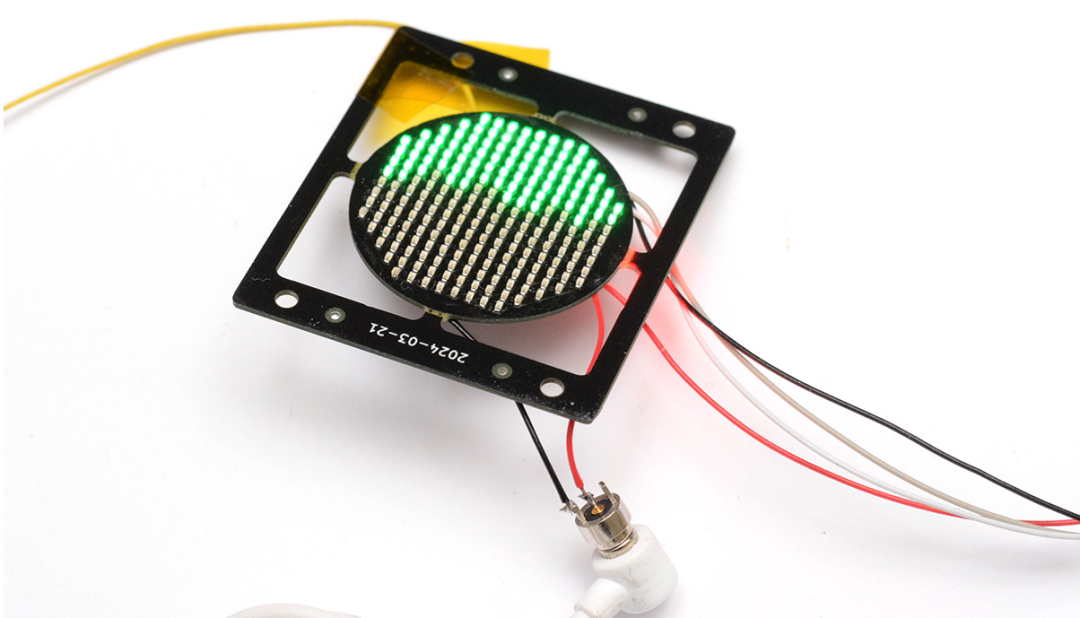
制作這個小小的顯示屏花了很長時間。我用一張激光切割的卡片來固定 LED,還用了一個 MCH2022 的紀念品來支撐整個裝置。
這讓我想起了一篇我曾經讀過但怎么也找不到了的關于繩結的論文。《阿什利繩結大全》(The Ashley Book of Knots)被譽為繩結領域的“圣經”,收錄了大量使用了幾個世紀的繩結。但是,當人們用數學符號來描述這些繩結的拓撲結構時,發現其中一些實際上是相同的,至少從拓撲學的角度來看是這樣。它們之所以被分開收錄,是因為當時沒有一種嚴謹的語言來描述它們,而在頭腦中將一個繩結的形態轉換成另一種,是極其困難的。
我想事情并沒有那么簡單。如果你打結的方式不對,可能會影響其性能,所以可以說一個重構后的結可能有不同的應用場景,但你至少會認為同一個結的不同變體應該被歸為一類。我想表達的是,人腦在理解繩結這類拓撲結構時,能力出奇地有限。
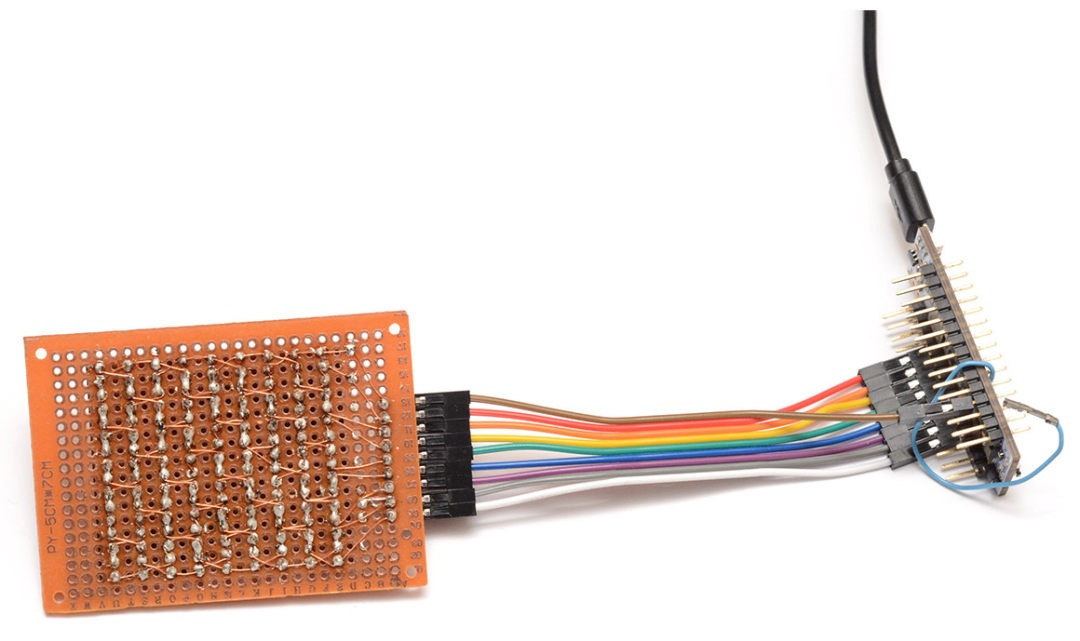
我們將這個8x9的矩陣連接到了L432開發板上。右邊那根藍色的線是芯片的BOOT0引腳,它沒有被引出,但在很久以前調試閃存合成器時需要用到。
手焊這些漆包線的痛苦經歷,讓我下定決心,必須盡快設計一塊 PCB。我打算先設計一個通用的、對角線布線的查理復用 LED 陣列,以避免將來再受這份罪。你可以認為這是某種不那么隱晦的鋪墊。但在緊急關頭,沒有什么比一個手工接線的原型更能毫不延遲地驗證你的想法了。
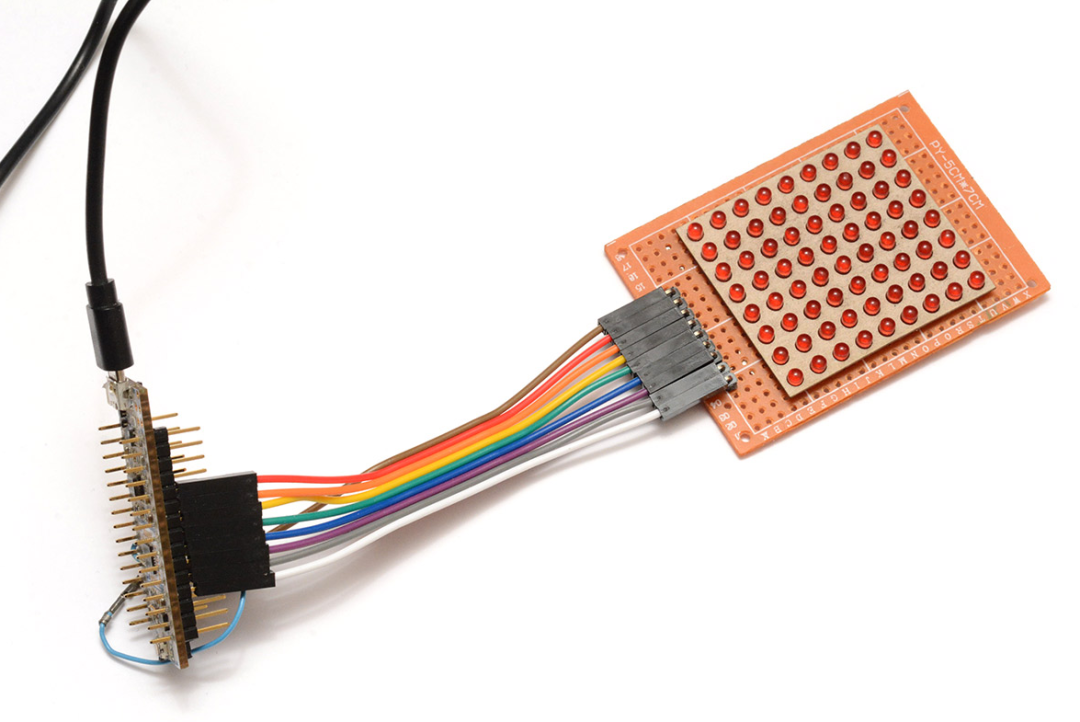
我讓FLIP模擬程序在L432上跑了起來,先是一個小小的8x8正方形,然后是一個想象中的流體吊墜的左上角。
當我們思考查理復用顯示屏可能的布線方式,以及這種新穎的布線模式是如何一直擺在眼前卻被忽視時,我們不禁好奇,還有多少其他的布線方案尚未被發現。人們很自然地會想,能不能用計算機算法來尋找新的可能性。
通常來說,自動布線器(Autorouters)是出了名的不好用。在不久的將來,當人們將巨大的神經網絡模型投入到這個問題上時,情況可能會改變。但要讓自動布線成為一個可行的選項,我們需要準確地描述約束條件。比如,某些元件必須放在某些位置。一個更重要的約束是布線必須匹配網表(也就是原理圖)。但在我們的案例中,那個原理圖并不是固定的:由于有查找表,我們不關心哪個顯示網絡最終連接到哪個GPIO引腳。但搜索空間遠比這要大得多。我們希望將所有LED限制在顯示屏的網格內,但我們不關心哪個LED放在哪個位置。“傳統”查理復用矩陣的查找表,與對角線交叉布線的版本是截然不同的。
約束可以減少搜索空間,有了足夠的約束,通過暴力破解來解決問題就成為可能。但我們這里想要自動化的約束是如此寬泛,遠少于其他電路設計的約束,以至于我認為我們短期內還無法自動布線出一個更好的查理復用顯示屏。還有一些我沒有提到的更深層次的“非約束”。在后續的一個項目中,由于空間極其緊張,我最終將一些走線穿過了微控制器上未使用的GPIO焊盤,從而打破了“不同網絡不應相互接觸”這一隱性約束。在芯片的固件中將那些引腳設置為三態是舉手之勞,但意識到這一點會進一步擴大我們的搜索空間。
總之,我們還是說回吊墜的電路吧。
提醒一下,“傳統”的查理復用矩陣遵循這樣的模式:
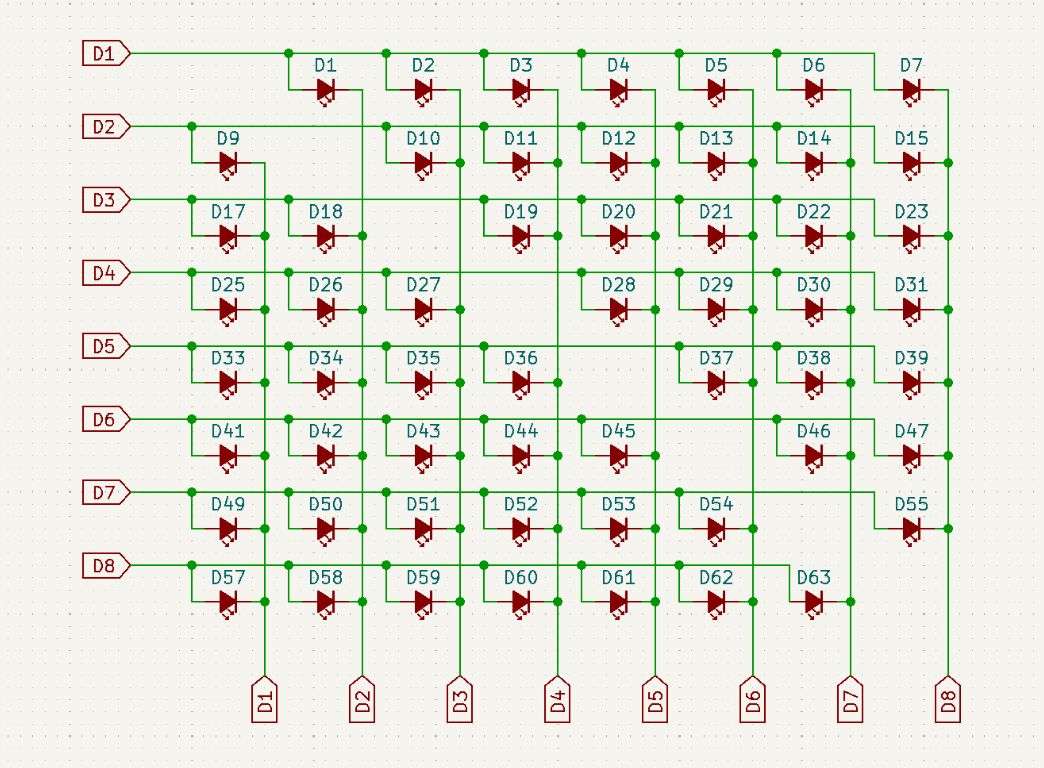
在兩條邊上添加標簽有助于理解,但嚴格來說只需要一條邊,因為連接可以沿著對角線進行。這種排列方式,每個LED至少需要一個過孔。
而對角線排列,在擠壓成類似圓形的形狀后,看起來是這樣的:
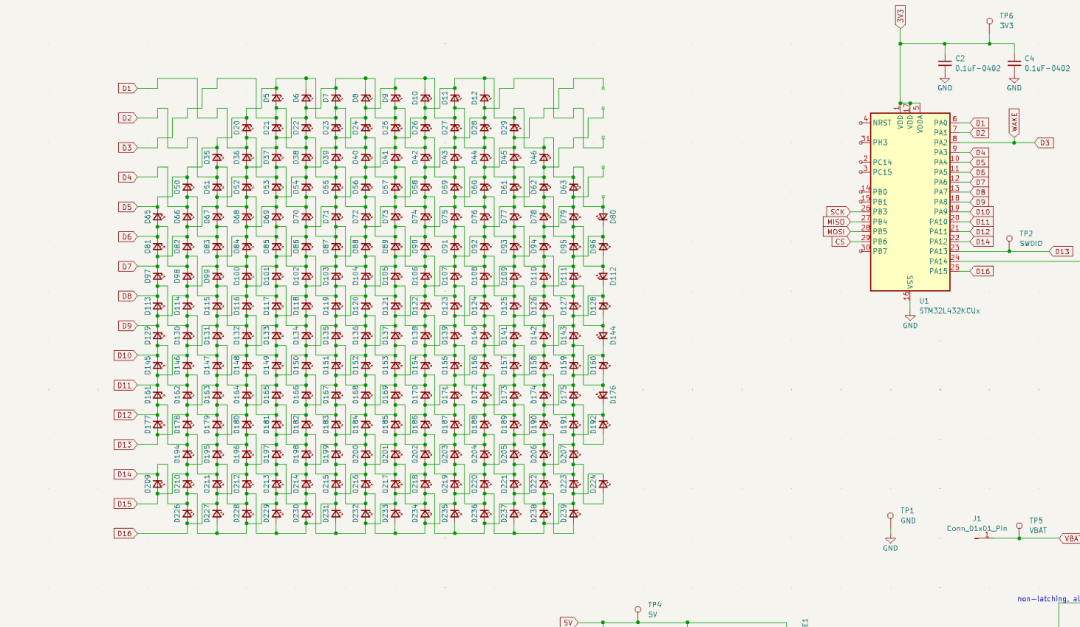
在16個GPIO引腳上,最多可以驅動240個LED,而我們只需要216個來填滿顯示屏,但有一條邊必須由缺失的角落拼湊而成。我當時有些隨意地做了這件事,刪除了未使用的LED,并將最近的移到了空位上。在這個過程中,我們得到了一些與原有模式不匹配的LED。這后來給我帶來了麻煩,因為那條邊上的一個焊橋現在成了問題——你猜得沒錯,焊橋恰好就發生在那里……如果布局再周到一點,我想我們可以讓整個顯示屏都具有端到端的連接特性,從而使其免受焊接錯誤的影響。
顯示屏本應是一個圓形,但巧合之下最終成了一個八邊形。對于Simsimsim程序,我只是簡單地根據到中心的距離來放置LED,一個從第一性原理出發構建的圓形。碰巧在直徑為16時,根據你是向下取整還是向中心取整,你可能會得到一個八邊形。我曾考慮過刪除一些角落的LED使顯示屏更圓,但后來放棄了這個想法。
總的來說,吊墜的第一個PCB設計比我預期的要容易。我們沒有從GPIO獲取大電流,所以背面真的不需要放太多東西,而且減少的過孔數量讓事情變得簡單得多。我們也有足夠的空間根據需要移動那些過孔。
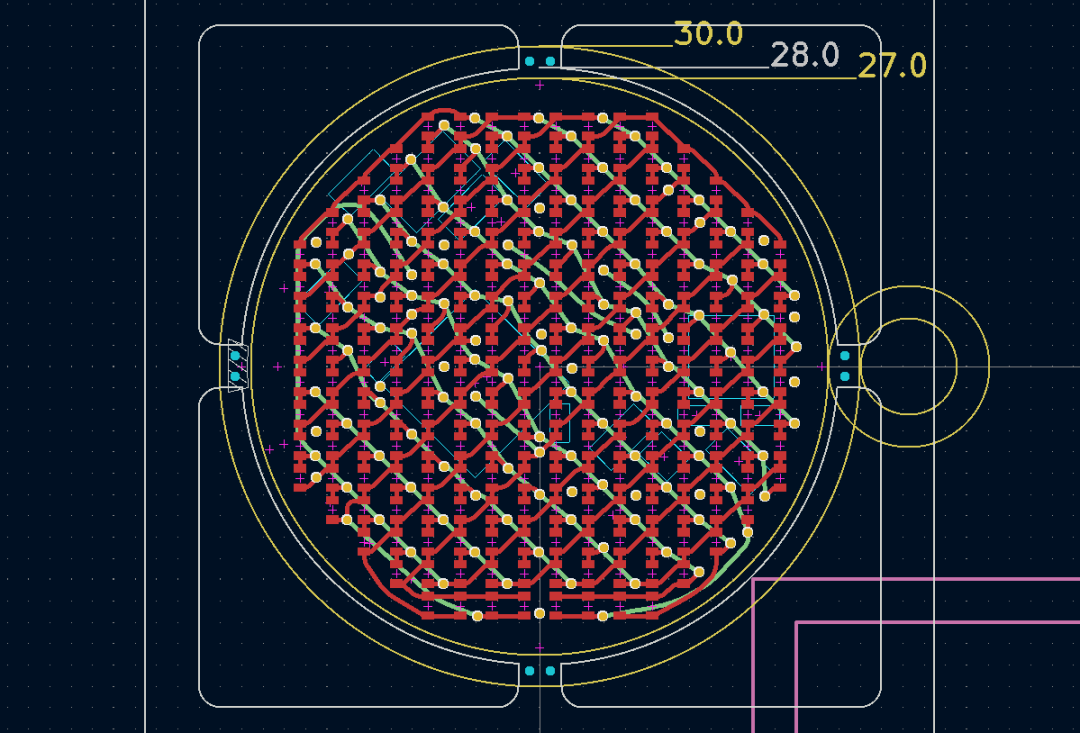
給PCB的內層做圓角可以通過一個插件完成。
我手動進行了拼板(panel),因為我需要一種方法來將板子固定在貼片機中。你可以讓板廠為你拼板,但那樣你就得接受他們的布局,而且元件坐標文件也需要相應調整。我手動制作了郵票孔,只需在邊界上放置兩個鉆孔,再畫一圈阻焊環來標記PCB的邊緣。記住,通常用于切割這些板的銑刀直徑是2mm。給大部分內部邊緣做圓角相當容易,但在郵票孔處,我們要與另一個彎曲的輪廓相配合。
每個郵票孔之間的四分之一圓弧在KiCad中制作起來真的很麻煩。回想起來,我可能應該在其他軟件中畫好然后導入一個DXF文件。在KiCad中,我首先放置了板子的圓形輪廓,然后用拼板的支撐臂與之相交。我把視圖放大很多倍,微調相交線的末端以精確地與圓相接,然后用它們作為圓弧的起點和終點。整個過程非常繁瑣。
為了掛鏈子,我用一根彎曲的金屬絲來壓住電池。功能上沒問題,但有點簡陋。如果你想找PCB安裝的鍍金彈簧端子,正確的搜索詞是“RFI屏蔽彈片”(RFI shield finger)。
我后來將彈片升級成了一個更大、行程更長的型號,但沒有費心去更新3D模型。
LiR2450 紐扣電池周圍有足夠的空間。最初的設計要小一些,但在我努力尋找磁吸充電接口時把它增大了。早在 2023 年,速賣通上出現了一堆非常便宜的“智能戒指”,其中一些使用了 4mm 的磁吸充電接口。我最初訂購它們是因為想拆下里面的弧形電池,這種電池到目前為止還無法小批量購買。但對這個吊墜來說,一個磁吸充電接口的吸引力是不可否認的,前提是我能找到貨源。
搜索 “4mm 磁吸充電接口”或類似詞條,返回了一堆伸入外殼比我能接受的要深得多的接口。它們顯然是作為通孔元件設計的,而戒指的總厚度可能只有 3mm。

在寫這篇文章的時候,市面上可用的接口種類已經急劇增加,我花了很長時間尋找的4mm接口現在確實出現在了搜索結果的第一頁,所以它可能只是一個當時尚未被索引的新發布產品。以備將來參考,零件號是WNRE的cx-4mm-jz。

順便說一句,不同 4mm 接口的充電線是不兼容的。盡管它們的極性相同,甚至是磁極性也相同,但其中一根的線纜無法牢固地吸附在另一個接口上。我認為較大的接口磁場更強,相應地線纜上的磁場較弱,可能是為了減少它吸附到附近金屬物體上造成短路的可能性。
金屬加工
視頻完整地展示了整個過程,基本上就是鉆一些黃銅并制作幾個凹槽。制作一個壓入式的后蓋,絕對比加工一個精細的螺紋要快得多。對于如何制作壓入式后蓋,我沒有任何明確的尺寸參考,只是做了一些有根據的猜測。最終的壓入式后蓋測試件確實能扣合在一起,但有點松,無法在張力下保持固定。然而,加入一個O型圈后,完全消除了松動,并且順便提供了一個防水密封。O型圈的存在意味著所需的公差可以寬松得多。
拍攝這個過程也挺有意思的,因為這臺車床比我習慣用的那臺大Colchester要小。這是一臺Hardinge車床,我的磁性三腳架太大了,用不上。而且,主軸箱上也沒有平坦的表面可以安放。
幾個魔術臂(magic arms)救了場。
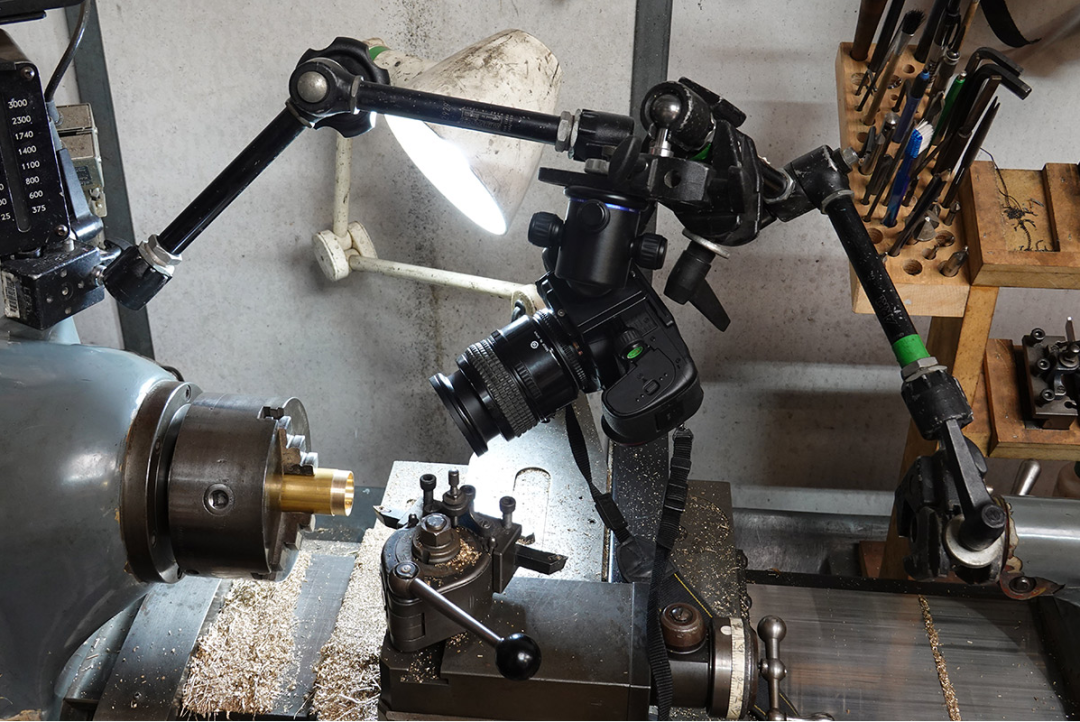
這樣放置相機非常不方便,使得整個過程耗時更長。理想情況下,我可以用一個大支架來固定它,但車床馬達的振動意味著如果相機不是從多個位置支撐,拍出的畫面就會晃動。如果我能像我希望的那樣,在這臺車床上做更多的項目,我必須想出更好的拍攝辦法。
在金工進行到一半時,我決定制作第二個吊墜,這次帶一個表鏡來覆蓋顯示屏。市面上有各種直徑的表鏡,厚度、平面或曲面等選擇也很多。但我努力尋找,卻找不到任何關于其尺寸公差的信息,或者說,找不到任何關于容納它的金屬部分的尺寸信息。
我切了一個小的測試件,選擇了一塊直徑為27.5mm的玻璃。我想象著在某個地方應該有一些關于如何制造手表以容納這種玻璃的說明,但我能找到的只有關于在手表維修期間更換玻璃的信息。在玻璃和金屬之間有一個墊圈(gasket)。墊圈厚度為0.45mm,那么安裝槽的總直徑將是28.4mm。
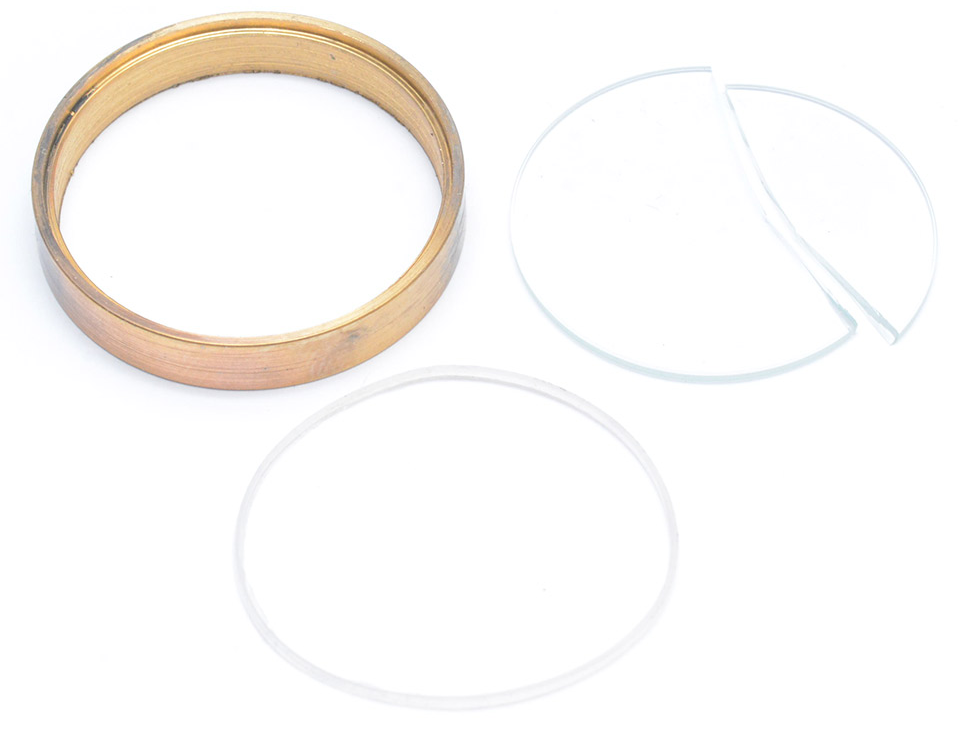
玻璃確實完美地壓了進去,用力恰到好處。測試的直徑似乎很完美。玻璃的破裂是后來才發生的,當時我對自己不用特殊工具就能輕松壓入玻璃變得過于自信。有時候測試這些極限來校準自己的判斷力是件好事。
總之,那些平面玻璃很便宜,所以沒什么損失,我便毫無顧忌地繼續制作第二個吊墜外殼。當要鉆正面的 28.4mm 凹槽時,通常在切斷零件后重新夾持會很麻煩。但大量的軟爪夾頭(soft collets)讓這不成問題。軟爪夾頭的理念是,你可以對它們進行加工,以定制適合你正在處理的零件,但顯然是巧合,架子上的幾個軟爪夾頭已經能匹配我 28mm 的內徑了。

我真的很喜歡這些微型硬質合金鏜桿。
銑削過程平淡無奇,我想我當時過于謹慎了。對于后續的吊墜,我飛快地完成了這一部分。方形夾頭座里的塑料心軸工作得很好(并且可以為后來的吊墜重復使用)。

這是一個非常令人愉快的小凹槽。O型圈為壓入式后蓋增添了一些輪廓感,我喜歡它的外觀,把它變成了一個設計特色。另一種選擇是試圖隱藏它,但這需要更嚴格的公差,并且也使打開它更加困難,因為沒有空間插入開表刀。
連接環是用“硬”黃銅焊料焊接的。珠寶商使用多種不同等級的焊料,盡管即使是“軟”珠寶焊料也比普通的電子焊料要硬。其原理是,你可以用最硬(熔點最高)的焊料焊接第一個接頭,然后用較軟的焊料焊接后續的接頭,而不用擔心之前的接頭會熔化。
我的直覺是,我可能可以用最硬的焊料完成兩個接頭,但到目前為止,對于所有的吊墜,我都用軟焊料焊接第二個接頭。這是電子焊料,在之前一個項目收到一些負面評論后,我特意用了無鉛焊料。這本意是一個微妙的玩笑,因為黃銅合金本身就含有大量的鉛。

我后來才意識到,這種無鉛焊料與鍍金完全不兼容,它就是無法附著在表面上。我并不覺得這看起來很糟糕,但在過去,銀鉛焊料能夠毫無問題地接受電鍍。對于最初的幾個吊墜,我把焊角做得盡可能小,但后來擔心可能會有縫隙影響整體密封性,于是把焊角做得更突出了。

我用電鍍刷給這些零件鍍了金。對于前兩個吊墜,我的表面處理工作做得非常糟糕,刀痕被電鍍過程凸顯了出來。我當時有點急于完成,因為PCB很快就要到了。
有時候在電鍍過程中會出現這些棕色斑點。我不太確定是什么原因造成的。

電鍍過程的一個預期步驟是之后用非常細的研磨劑(珠寶商紅蠟)拋光零件。這可以去除這些痕跡,并給我們一個完美的表面,或者至少在沒有刀痕的情況下會是完美的。

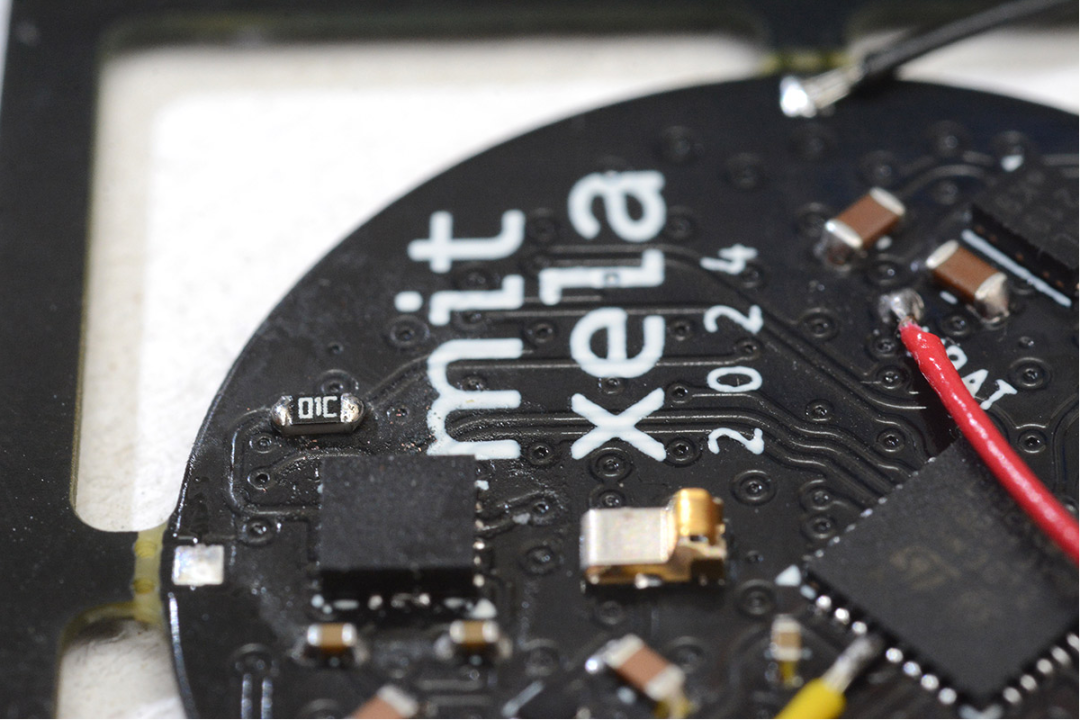
完成這部分比較倉促,但誰在乎呢?電路板已經到了。首先從貼片機上下來的是這個樣子:
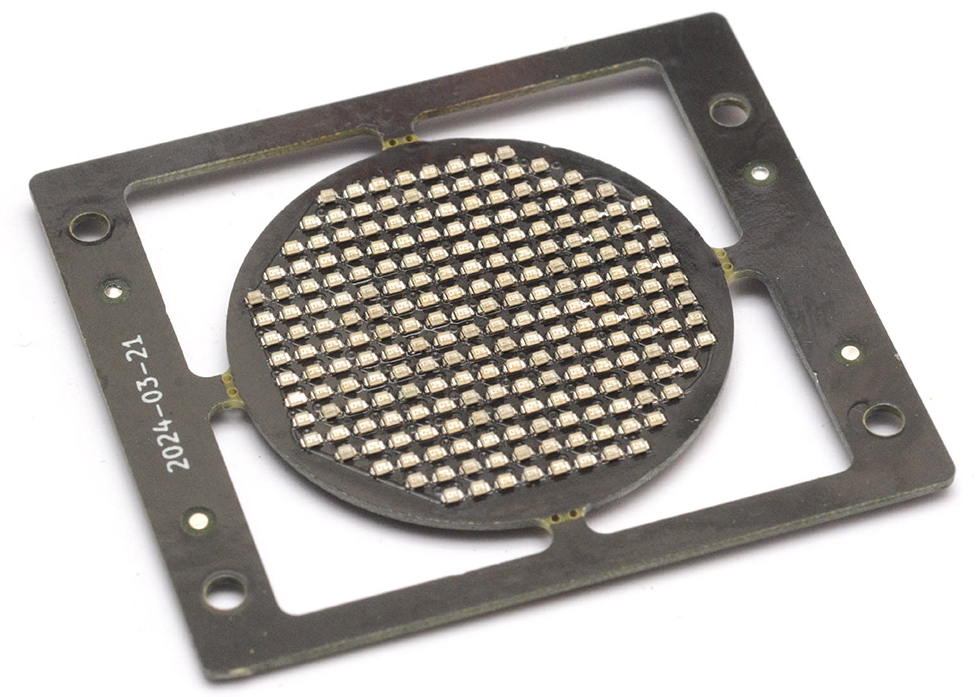
焊橋比我預期的要多。我用了一種與平時不同等級的焊膏(只是為了試驗),我想如果鋼網上的開孔小一些會更好。0402的LED非常小,修復它們之間的焊橋相當棘手。如前所述,它們中的大多數對性能沒有影響,因為端到端的LED大多屬于同一個網絡,除了邊緣上我重新定位的那幾個。然而,這有損美觀,所以我感到必須清除這些顯眼的錯誤。
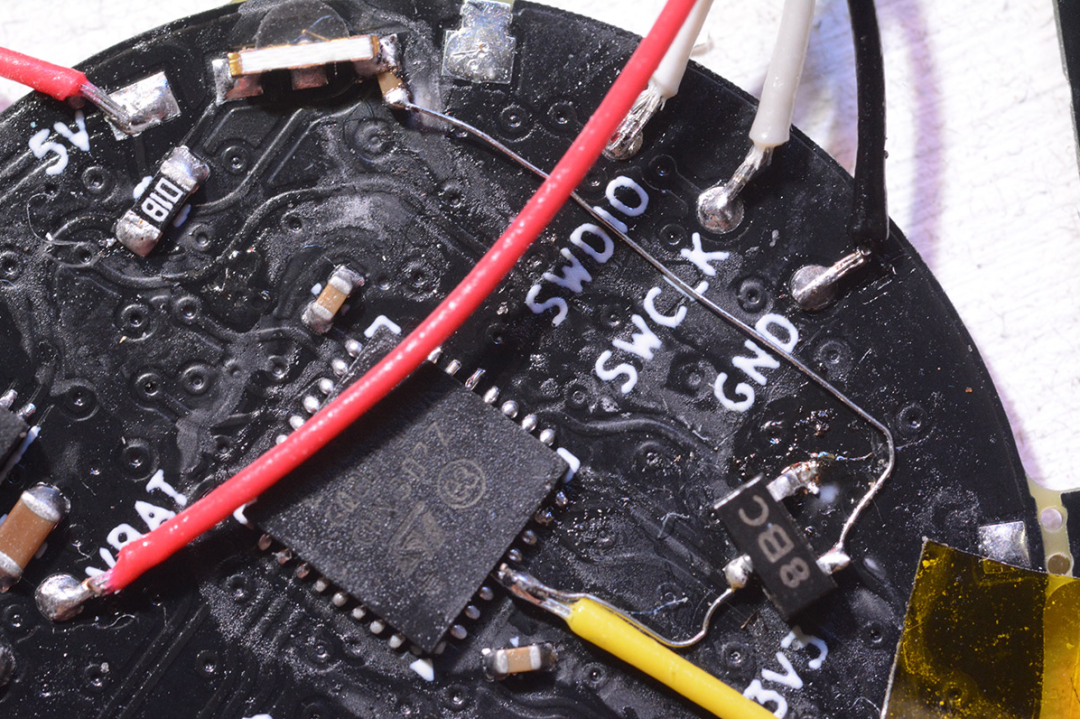
一個疏忽是,我忘了把微控制器的復位引腳給引出來。顯示屏占用了整個A端口,而SWDIO/SWCLK調試線也位于A端口上。對于一般使用,這不成問題,因為我們可以在軟件中禁用它們。但對于開發來說,這使得我們無法將新程序刷入板子。訣竅是在編程之前立即復位芯片,但在這里那意味著要加一根飛線(bodge wire)。
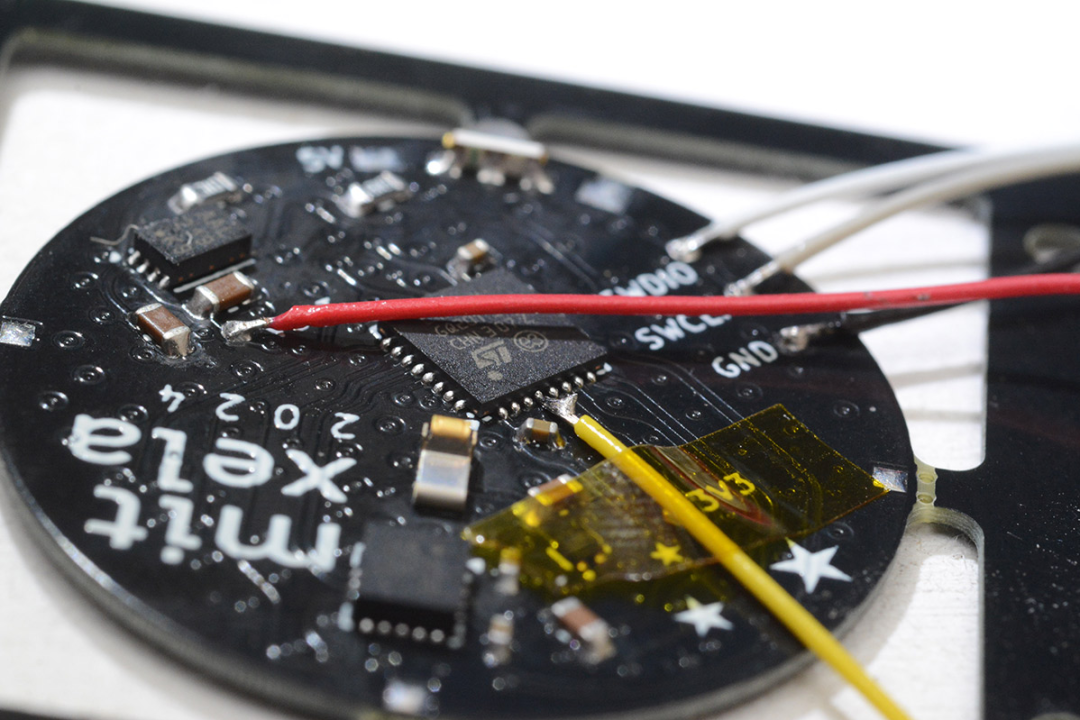
第一塊電路板成了我的開發板。在這個階段,我仍然沒有找到心儀的磁吸接口,但舊的磁吸接口證明了充電電路是工作的。用一個3D打印的紐扣電池座,我也能用電池為開發板供電了。
加速度計中斷線上的總線保持器(bus keeper)引起了幾個顯示故障。在走線上飛焊了一個電阻,情況有所幫助。
最終我在那里加了一個二極管,徹底解決了問題。之前我用一個LED替換了那個電阻,這還有一個額外的好處,就是當我輕推板子時可以看到信號的變化。
我在視頻中快速展示了一些我應用到電路上的其他飛線修正,主要是為了確保電路不會被“騙”進軟鎖定狀態。電池欠壓檢測是在軟件中實現的,這讓我們的電路更簡單,但也讓我感到足夠不安,以至于下一個版本的PCB在硬件中實現了它。簡單的外殼設計,沒有按鈕,也沒有簡便的打開方式,這帶來了一定程度的偏執。我真的很想要一種在需要時復位芯片的方法,于是構建了監聽充電接口的電路。
一些數據手冊或開發板建議總是在STM32芯片的復位線上加一個100nF的電容。我不確定是否需要,但我認為我寧愿在引腳上有一個可預測的、合理的電容,而不是少量未知的寄生電容。連接充電器的脈沖通過一個NPN晶體管基極上的小電容,該晶體管放大電流以拉低復位引腳。上圖中未顯示的是,我按照建議在復位線上加了一個100nF電容,并在信號電容的晶體管側加了一個下拉電阻,以嘗試在充電器連接時最大化脈沖電壓。
在充電接口靠近時很容易短路,在這種情況下,自恢復保險絲(polyfuse)會發熱并降低輸出電壓。盡管當電壓恢復時它會開始充電,但緩慢上升的電源不足以觸發復位電路。我覺得這沒關系,因為如果你真的需要復位它,只需先連接線纜的磁吸端,然后再插入USB。而且,在重新設計的PCB中,硬件欠壓檢測意味著復位芯片永遠不會是必需的,這個電路只是為了安撫我的偏執。
跳過一些步驟,我們用環氧樹脂將磁吸接口固定到位,并且也用環氧樹脂填充了充電LED的小孔。在顯微鏡下,那里有一個微小的樹脂彎月面。
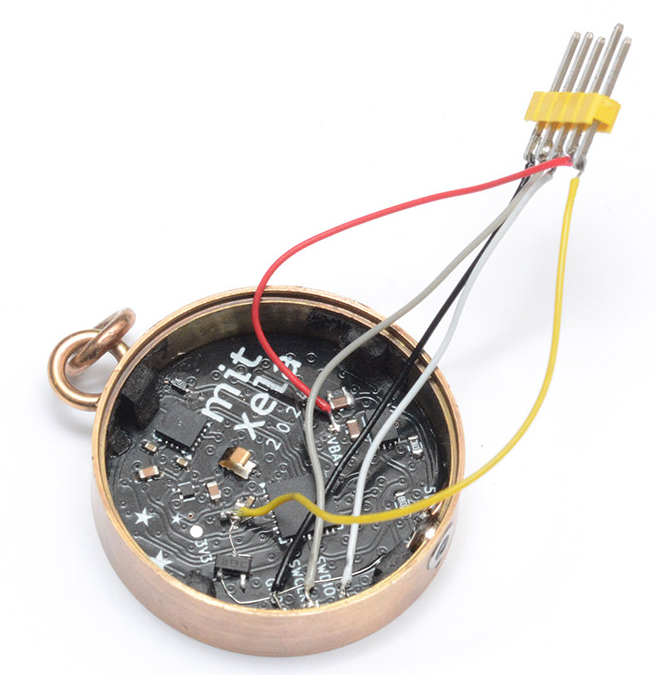
電路板直接焊接到外殼上,以保證機械穩定性和與電池地線的電氣連接。

經過幾次組裝和拆卸,泡沫墊被修正,彈簧針換成了更高的,整體顯示亮度被降低,以及各種其他顯示故障被糾正。

合上后蓋并且除了那個充電接口外無法接觸任何東西,這有點嚇人。該設備的唯一輸入是加速度計的數據。我曾計劃通過在鏈子末端旋轉吊墜來激活“深度睡眠”模式——這與大多數手勢相比非常容易檢測,只需Y坐標在一段時間內超過某個閾值即可。如果這也是喚醒它的方式,那將會很瀟灑。不幸的是,那將意味著更復雜的喚醒邏輯。我們需要先喚醒,然后檢查條件,如果不滿足則返回睡眠。
但我很高興地想到了一個簡單的辦法,就是提高加速度計運動檢測中斷的閾值。通過將其設置為6g,它不太可能意外喚醒,但輕輕搖晃一下又能足夠容易地讓它恢復工作。“搖晃喚醒”(Shake-to-wake)。這是一個很好的解決方案,因為它使用的電量并不比常規睡眠多。

最終效果還算不錯。
但我們還能做得更好!
原文轉載自https://mitxela.com/projects/fluid-pendant,經過翻譯、校對
注意:如果想第一時間收到 KiCad 內容推送,請點擊下方的名片,按關注,再設為星標。
常用合集匯總:
和 Dr Peter 一起學 KiCad
KiCad 8 探秘合集
KiCad 使用經驗分享
KiCad 設計項目(Made with KiCad)
常見問題與解決方法
KiCad 開發筆記
插件應用
發布記錄
審核編輯 黃宇
-
電路板
+關注
關注
140文章
5317瀏覽量
108180 -
Flip
+關注
關注
0文章
11瀏覽量
10109
發布評論請先 登錄
AI吊墜健康革命:情緒識別、飲食追蹤,2026可穿戴新賽道開啟

凱茉銳電子|熱成像機芯KC-2R06C-9:無人機吊艙的“全天候感知核心”
南京福爾利 × 圖撲:固廢行車吊 VR 遠控系統

eVTOL墜撞動力學高保真建模分析:材料-結構-乘員多尺度耦合仿真與驗證

RFID盤點軟件與RFID吊牌:服裝庫存精準管理的核心驅動力 政策與技術融合新趨勢
KC-2IR10AN熱成像機芯吊艙:驅動低空經濟領域智能化升級
Linux 下交叉編譯實戰:跑起來你的第一個 STM32 程序





 工商網監
工商網監
評論