 沒有它,毫米波雷達就是個擺設
沒有它,毫米波雷達就是個擺設

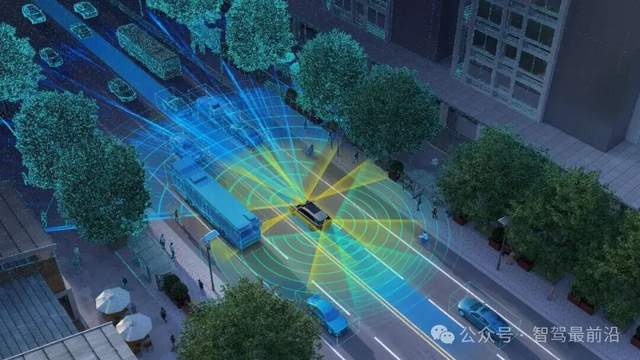
在自動駕駛的感知鏈條中,毫米波雷達是穿透雨霧、精準探測障礙的“硬核擔當”。但很少有人知道,這顆 “感知眼” 的生死,掌握在一個毫不起眼的元器件手里——晶振。沒有它,再先進的毫米波雷達也會瞬間 “失明”,淪為無用的金屬零件。
一、毫米波雷達怎么“看見”世界?
毫米波雷達的核心是“用信號丈量環境”,三步完成感知:
發信號:生成24GHz/77GHz 高頻毫米波,射向周圍;
收信號:捕捉碰到障礙物反射的“回波”;
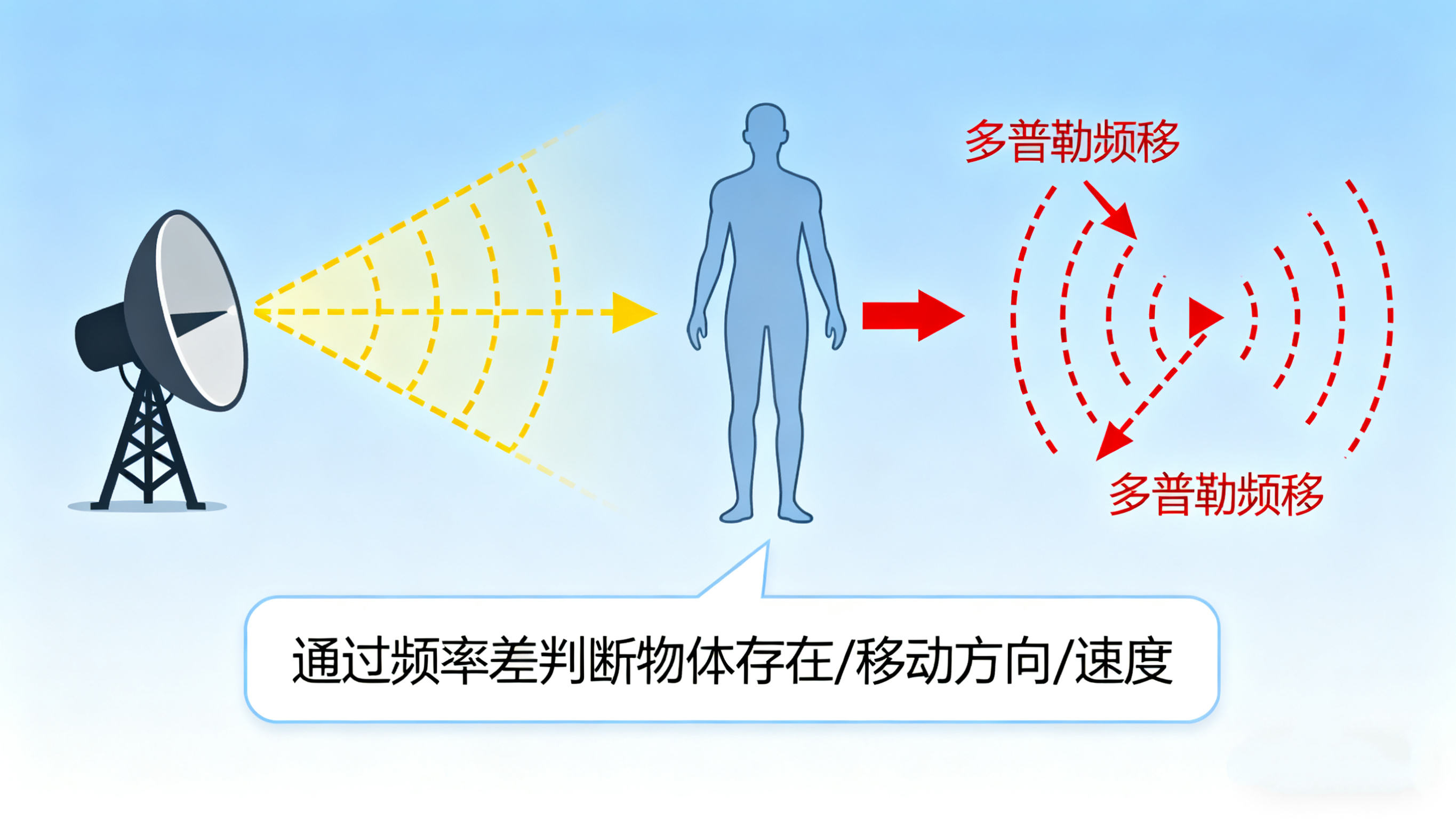
算結果:通過發射與回波的時間差(測距)、頻率差(測速)、相位差(測角),告訴自動駕駛系統目標位置。
而這一切的前提,是所有動作都要踩在精準的時間點上,而晶振,就是這個 “時間基準制定者”。
二、沒有晶振,雷達會犯3個“致命錯”
1. 發不出 “準信號”,測距全錯
雷達的高頻毫米波需要靠 “鎖相環(PLL)” 將低頻信號放大而來,而這個 “低頻信號種子”,正是晶振提供的。
沒有晶振,PLL 就是 “無米之炊”:要么生不出高頻信號,要么信號頻率亂飄(比如 77GHz 飄到 77.001GHz)。這會直接導致測距誤差:比如30 米的距離可能算成25米或35米,高速跟車時要么追尾,要么誤剎車引發事故。
2. 讀不懂 “回波”,測速失靈
雷達接收回波后,要先“降頻”(轉成易處理的中頻信號),再用ADC(模數轉換器)轉成數字信號,這兩步都要晶振“同步指揮”:
降頻需“本地振蕩器(LO)”信號,源頭是晶振。如果沒有晶振,LO頻率會亂跳,回波會變成“亂碼”;
而ADC采樣要固定節拍(如每秒100萬次),節拍同樣由晶振提供。如果沒有晶振,采樣會出現混亂,可能導致系統把靜止護欄誤判成“50km/h靠近的車”,或漏判橫穿馬路的行人。
3. 分不清 “左右”,測角失效
現在的雷達靠“MIMO架構”(多發多收)提升測角精度,比如區分相鄰車道的車。但多通道需統一時間基準,否則會“各看各的”:晶振把同一時鐘傳給所有通道,確保信號“同頻同相”;沒有晶振,通道信號相位會出現錯位,原本右側的車可能被算成左側,變道時極易引發碰撞。
晶振如此重要,而普通晶振無法滿足毫米波雷達的要求,只有達到“車規級”的晶振才能夠使用。
三、車載晶振:不是“隨便一個”都能用
普通晶振扛不住車載惡劣環境(如-40℃~+125℃的環境溫度、高頻振動、電磁干擾等),毫米波雷達用的必須是 “車規級”晶振:
頻率穩定度高:極端溫度下頻差可保持穩定,溫度再變信號也不飄;
抗干擾強:能抵擋住周圍環境的電磁干擾;
壽命長:平均無故障時間超10萬小時,夠車輛用10年以上。
晶寶股份在汽車電子領域深耕多年,具備成熟的汽車電子晶振解決方案,自主研發生產的車規級晶振已通過AEC-Q200、AEC-Q100測試,并為眾多頭部汽車品牌供貨,品質已經過大量實踐檢驗。
四、小晶振,大安全
談論自動駕駛黑科技時,我們總盯著雷達、AI芯片,卻忽略了晶振這個 “小角色”。沒有它提供的精準時間基準,雷達測不準距離、速度、角度,自動駕駛“看不見、判不明”,安全就是空談。這顆“電子心臟”看似微小,卻是自動駕駛感知鏈上的“生命線”。
審核編輯 黃宇
-
晶振
+關注
關注
35文章
3560瀏覽量
73436 -
自動駕駛
+關注
關注
793文章
14879瀏覽量
179790 -
毫米波雷達
+關注
關注
108文章
1162瀏覽量
66231
發布評論請先 登錄
如何克服毫米波雷達點云稀疏問題?

4D毫米波雷達為什么稱為激光雷達的“替身”?
毫米波雷達氣密性檢測儀

看不見的引擎:毫米波雷達線圈如何驅動自動駕駛
微波雷達和毫米波雷達有什么區別
4D毫米波雷達比3D毫米波雷達到底強在哪兒?

小米“新空調”火出圈!家居智能化加速,三家企業毫米波雷達新品齊亮相
恩智浦如何釋放毫米波雷達的技術潛力
毫米波雷達重塑煤礦感知能力


看懂毫米波雷達,這一篇就夠啦!

自動駕駛毫米波雷達之間會相互干擾嗎?

多毫米波雷達的實車連續測量應用案例
ADAS和防撞系統中的毫米波雷達方案




 工商網監
工商網監
評論