 AWStudio:輕松設置EtherCAT分布式時鐘,提升同步精度!
AWStudio:輕松設置EtherCAT分布式時鐘,提升同步精度!

在EtherCAT系統中,確保各從站設備的時鐘同步是實現精確控制的關鍵。本期我們將探討AWStudio運動控制版如何通過分布式時鐘同步機制,解決時鐘不一致問題,提升系統的同步性能。
 ?EtherCAT系統中的時鐘同步問題
?EtherCAT系統中的時鐘同步問題
EtherCAT 不使用分布式時鐘,各從站依賴本地時鐘獨立運行,無統一時間基準,這會導致工業自動化場景的可靠性與控制精度降低,引發以下后果:
- 多設備動作不同步:例如多軸聯動機床的多個電機、協同工作的機器人關節,會因時鐘偏差出現動作延遲或錯位,導致加工精度下降、設備卡頓甚至碰撞。
- 數據傳輸與采集誤差大:從站上傳的傳感器數據(如位置、溫度)會因時間戳混亂,導致主站計算(如速度、扭矩)出現誤差,影響系統調控準確性。
- 通信抖動敏感,穩定性差:無分布式時鐘的硬件校準機制,系統對通信抖動(如信號干擾、負載波動導致的傳輸延遲波動)容忍度會下降,影響系統整體的穩定性。
- 復雜拓撲場景無法適配:當 EtherCAT 網絡包含多個從站、采用線型/樹型等復雜拓撲時,各從站與主站的距離差異會導致傳播延遲不一致。無分布式時鐘的延遲補償功能,會使遠端從站與近端從站的時鐘偏差呈累積效應,最終導致整個網絡同步崩潰,無法滿足多設備協同的需求。
為了精確控制從站設備何時接收輸出數據和提供輸入數據,確保數據傳輸的準確性和實時性,EtherCAT設備系統需要實現時間同步。引入分布式時鐘(Distributed Clocks, DC)可以有效解決這一問題。
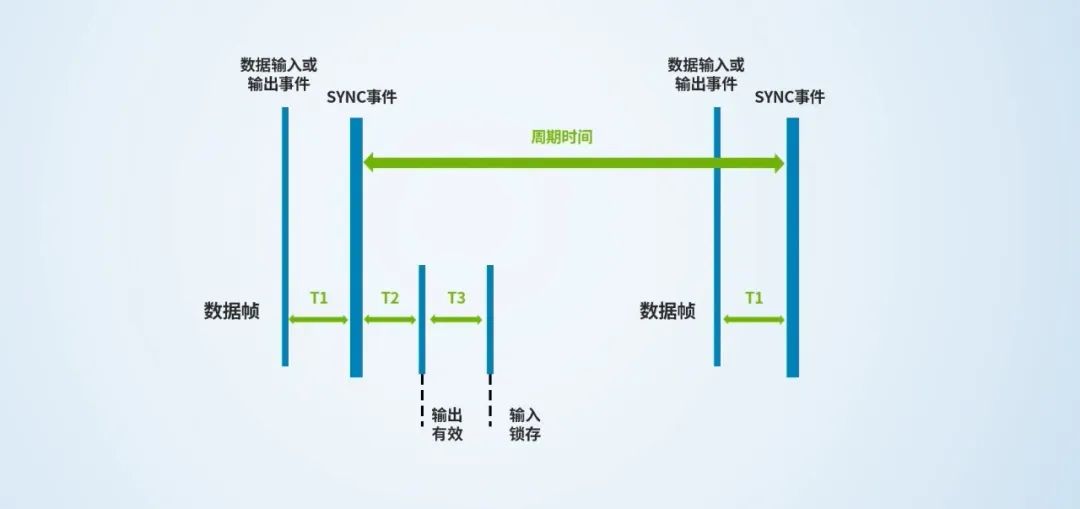
分布式時鐘同步機制是一種高精度的時間同步模式。如圖所示,數據幀在SYNC信號提前T1時間到達,從站在SYNC事件之前已經完成數據交換和控制計算。當接收SYNC信號后,立即執行輸出操作,從而提高了同步性能。可以理解為,某個從站數據幀到達后不立即處理,因為有些從站可能還沒接收到數據。通過等待一個指定的時間,所有從站可以一起處理數據,從而達到較好的同步效果。
?AWStudio運動控制版的分布式時鐘配置
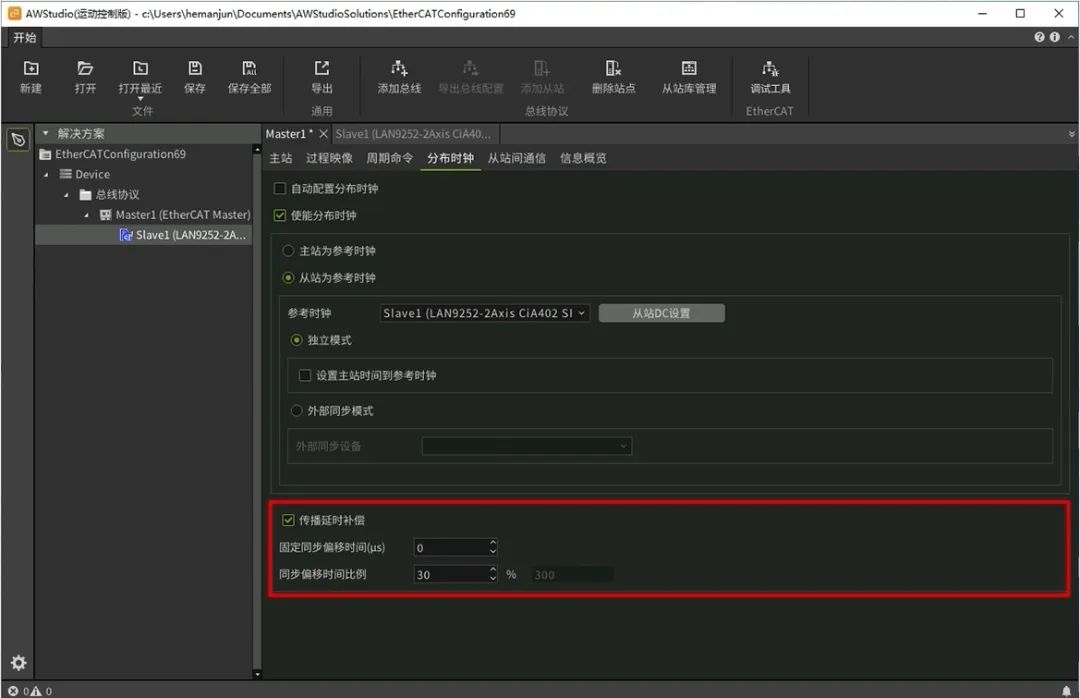
AWStudio運動控制版支持對分布式時鐘進行詳細配置,以確保整個網絡中從站設備的精確同步。這對于需要高精度時間控制的應用場景尤為重要。
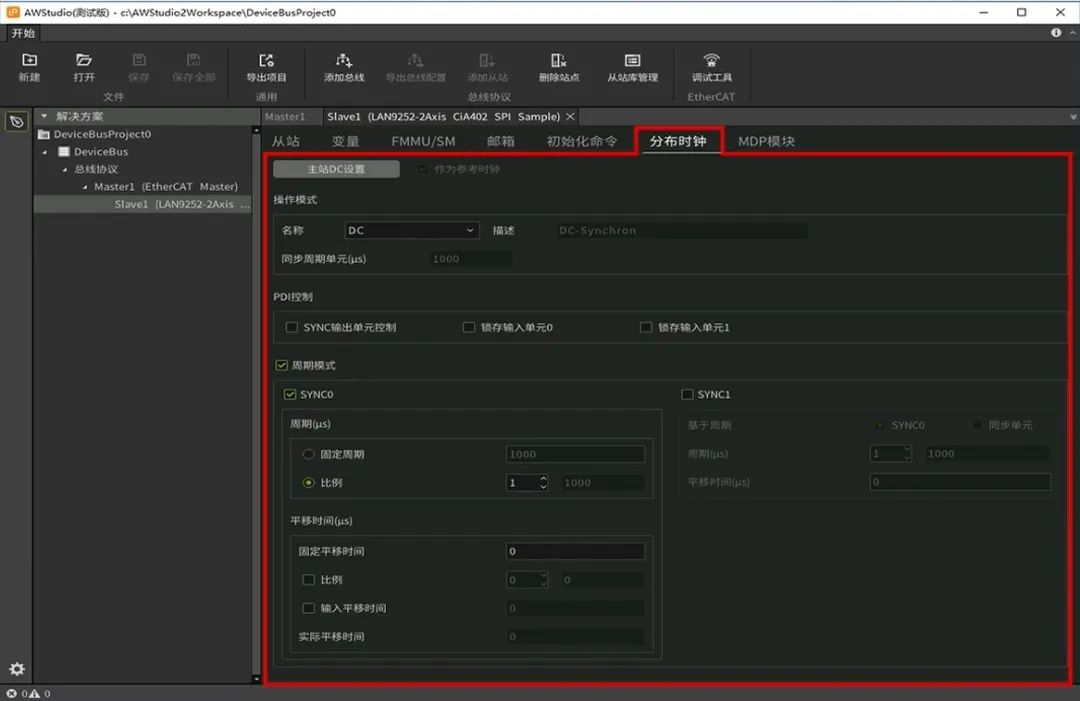
軟件提供了同步偏移和漂移補償的配置選項,幫助開發者根據實際情況調整時鐘參數,以達到最佳的同步效果。
?結語
通過分布式時鐘同步機制,AWStudio運動控制版為EtherCAT系統提供了高精度的時間同步解決方案。無論是自動化生產線還是機器人控制系統,AWStudio都能確保從站設備的精確同步,提升系統的整體性能。如果您對AWStudio運動控制版的分布式時鐘同步功能有任何疑問或建議,歡迎在評論區留言探討。
-
設備
+關注
關注
2文章
4861瀏覽量
73808 -
運動控制
+關注
關注
5文章
829瀏覽量
34629 -
ethercat
+關注
關注
20文章
1529瀏覽量
45668
發布評論請先 登錄
分布式軟件系統
高精分布式時鐘同步怎么實現?
分布式系統時鐘解決方案
HDC2021技術分論壇:分布式軟時鐘有多重要?
高精度同步時鐘信號在分布式錄波器中的實現

基于MAXII570的高精度同步時鐘信號在分布式錄波器中的實現
ARM-WinCE分布式系統平臺的時鐘同步設計

分布式數據采集系統中的時鐘同步

如何才能同步分布式系統中的所有時鐘?
【技術分享】EtherCAT 分布式時鐘簡介

基于ptp的分布式系統設計
AWStudio運動控制版:為EtherCAT配置帶來全新體驗



 工商網監
工商網監
評論