 LoRa1120模塊與ESP32點對點LoRa通信實現實踐指南
LoRa1120模塊與ESP32點對點LoRa通信實現實踐指南

LoRa1120多模收發器技術導論
LoRa1120模塊的核心是Semtech的LR1120芯片組,這是一款專為遠距離、低功耗無線通信和地理定位應用而設計的集成電路 1。在進行實際應用開發之前,對該模塊的核心技術能力進行深入分析,是確保項目成功的關鍵。這不僅是一個單純的LoRa收發器,更是一個集成了多種通信模式和定位功能的綜合平臺。
多頻段操作能力
該模塊具備在多個不同頻段下工作的能力,為不同應用場景和地區法規要求提供了高度的靈活性 。
Sub-GHz ISM頻段:支持433/470/868/915 MHz等免許可頻段,并可根據需求在150-960 MHz范圍內定制。這是傳統LoRa應用的主要工作頻段,其物理特性決定了它具有最遠的傳輸距離和最佳的穿透能力,適用于廣域物聯網(LPWAN)部署。
2.4 GHz ISM頻段:工作范圍為2400-2500 MHz。該頻段在全球范圍內通用,相比Sub-GHz頻段,它可以提供更高的數據傳輸速率。然而,其傳輸距離和穿透性相對較弱,更適用于對帶寬有一定要求且通信距離較短的場景,如工業自動化或智能家居。
S波段衛星通信:工作范圍為1900-2200 MHz。此功能使得模塊能夠直接與衛星進行通信,為地面網絡無法覆蓋的偏遠地區(如海洋、沙漠、山區)提供連接解決方案,是資產跟蹤和遠程監控等應用的理想選擇。
地理定位子系統
除了通信功能,LoRa1120還集成了兩種獨立的低功耗掃描引擎,用于地理位置確定 。
GNSS掃描器:支持多星座全球導航衛星系統(如GPS/北斗),采用云原生輔助定位模式。模塊本身只負責掃描衛星信號并捕獲原始數據,然后將這些輕量級數據通過LoRa網絡傳輸到云端進行解析。這種架構極大地降低了終端設備的功耗和計算負擔,使其適用于對電池壽命有嚴苛要求的定位應用。
Wi-Fi被動掃描器:通過掃描周圍的802.11b/g/n Wi-Fi接入點(AP)的MAC地址來進行定位。在城市或室內等GNSS信號較弱的環境中,Wi-Fi定位可以作為一種有效的補充或替代方案。同樣,它只捕獲MAC地址列表,交由云端服務解析具體位置。
協議與安全支持
模塊在物理層上符合LoRa聯盟發布的LoRaWAN標準規范,確保了與標準LoRaWAN網絡的互操作性。同時,它也支持Sigfox協議,并內置了AES-128硬件加密和解密引擎,為數據傳輸提供了硬件級別的安全保障 。這種多功能集成設計表明,工程師使用單一硬件平臺,僅通過固件配置,即可滿足截然不同的應用需求:例如在歐洲部署標準的LoRaWAN傳感器(使用Sub-GHz),在工廠環境中實現高吞吐量數據采集(使用2.4 GHz),或是在無蜂窩網絡覆蓋的地區進行資產跟蹤(使用GNSS + S波段)。這種設計策略有效減少了硬件物料清單(SKU)的數量和開發成本。因此,接下來將要介紹的基礎點對點通信測試,應被視為掌握該模塊全部潛能的第一步。
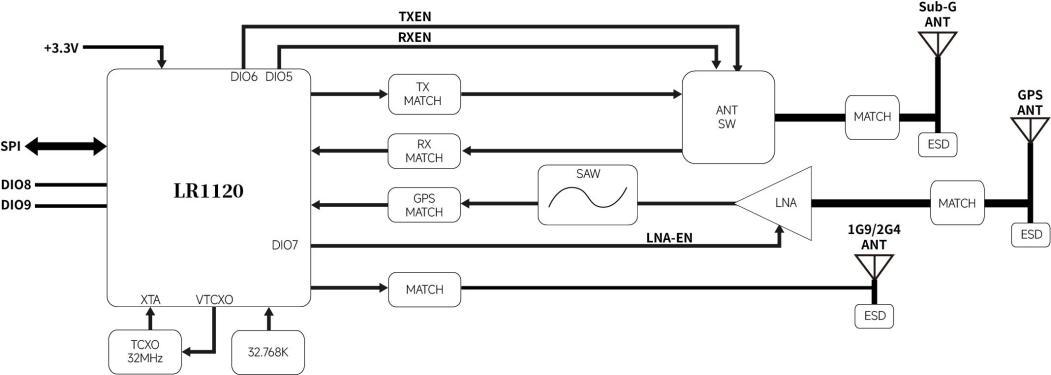
下圖展示了LR1120芯片的內部功能框圖,直觀地呈現了其多頻段射頻通路和與外部組件的連接關系。
硬件準備與系統互聯
搭建一個可靠的測試平臺是驗證無線通信鏈路性能的基礎。本節將詳細說明如何將LoRa1120模塊與ESP32微控制器進行物理連接。
所需硬件清單,為構建一個基本的點對點通信系統,需要準備兩套相同的硬件設備 :
引腳連接映射
將LoRa1120模塊與ESP32開發板通過SPI接口進行連接。下表詳細定義了推薦的引腳對應關系。務必確保兩套設備的連接方式完全一致 。
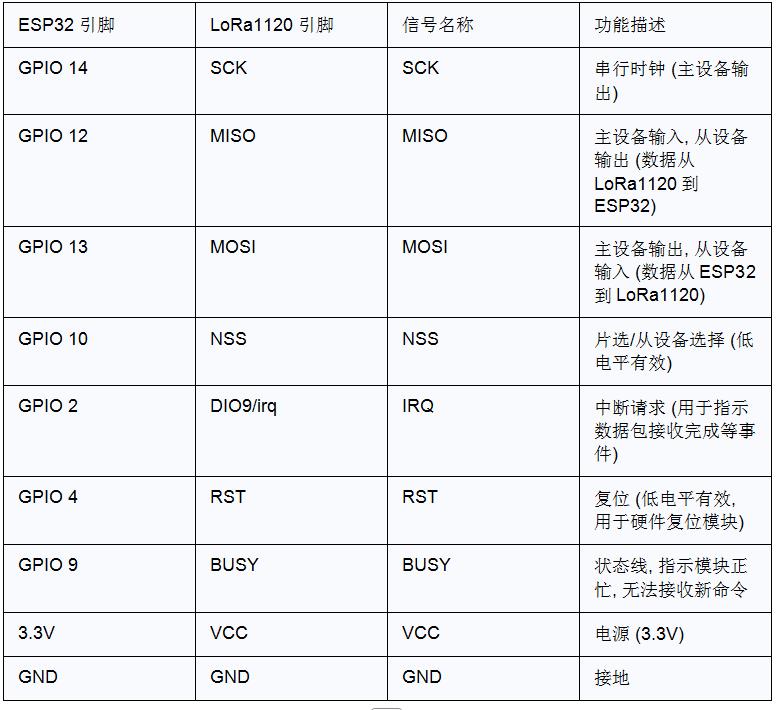
此連接方案采用了標準的4線SPI接口(SCK, MISO, MOSI, NSS)用于數據傳輸。除此之外,還有三條至關重要的控制線(IRQ, RST, BUSY)。對這些控制線功能的理解,對于編寫健壯的嵌入式固件至關重要。
RST (Reset): 用于通過軟件控制對LoRa1120模塊進行硬件復位,使其恢復到初始狀態。
BUSY (Busy): 這是一個硬件流控制信號。當模塊內部正在處理命令或處于活動狀態時,BUSY引腳會置為高電平,此時主控(ESP32)不應發送新的SPI命令。這可以有效避免命令沖突和數據丟失,確保通信的可靠性。
IRQ (Interrupt Request): 該引腳用于向主控發送中斷信號,以通知特定事件的發生,例如數據包接收完成或發送完成。采用中斷驅動的方式比輪詢方式效率更高,可以讓主控在等待事件時進入低功耗模式,從而顯著降低系統整體功耗。
注意:雖然上述引腳分配是推薦配置,但工程師可以根據自己的PCB布局或開發板資源進行調整。然而,任何硬件上的改動都必須在后續的軟件代碼中進行同步修改,否則將導致通信失敗 1。
配置Arduino開發環境
正確的軟件環境配置是程序開發的前提。本節將引導您完成Arduino IDE的安裝與配置,以支持ESP32和LoRa1120模塊的開發。
- 安裝Arduino IDE
從Arduino官方網站下載并安裝最新版本的Arduino IDE 。
- 添加ESP32開發板支持
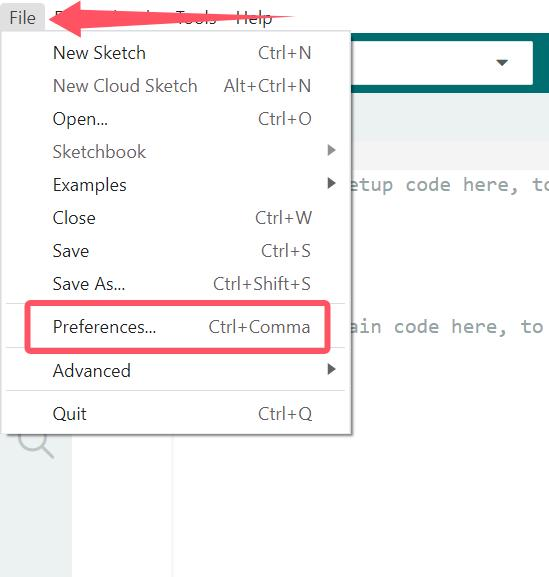
為了讓Arduino IDE能夠識別并編譯ESP32的代碼,需要添加ESP32的開發板管理器URL。打開Arduino IDE,點擊 File -> Preferences (參考下圖)。
在 "Additional Board Manager URLs" 字段中 (參考 下圖),輸入以下URL
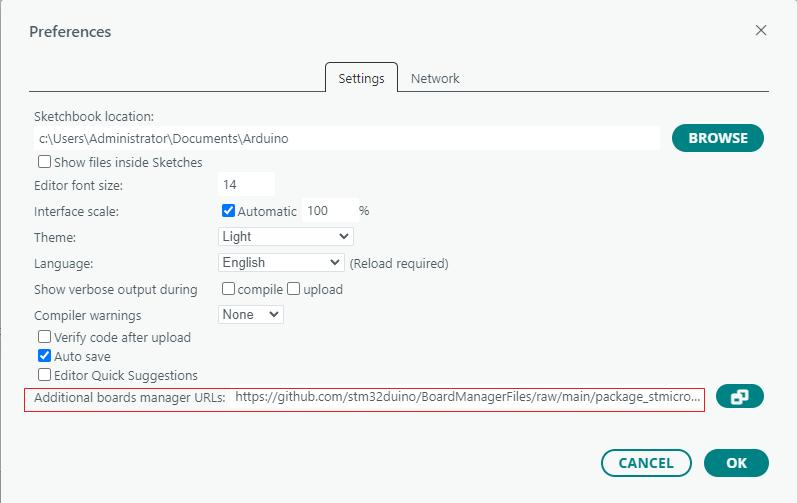
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
這個URL指向一個索引文件,它告訴IDE在哪里可以找到適用于ESP32系列微控制器的工具鏈、庫和定義。
- 安裝ESP32包
打開左側邊欄的 "Boards Manager"(開發板管理器)。
在搜索框中輸入 "esp32"。
找到由 "Espressif Systems" 提供的包,并點擊 "Install" (參考 下圖) 。
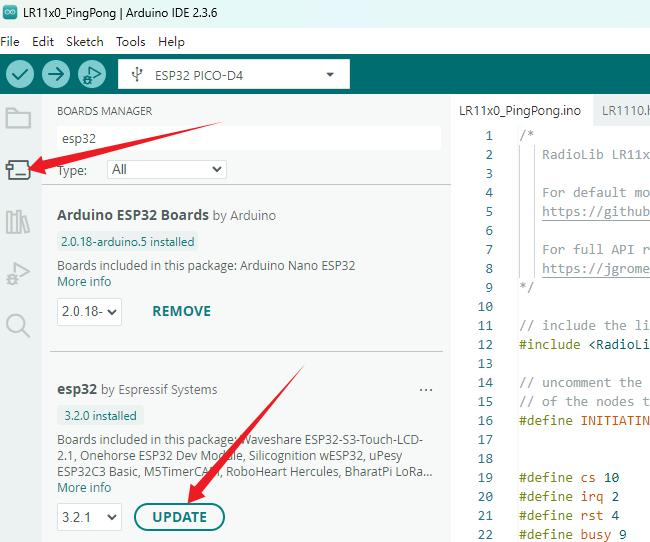
- 安裝RadioLib庫
RadioLib是一個功能強大的通用無線通信庫,它為包括LR1120在內的多種射頻芯片提供了統一的、高級的API接口。使用該庫可以極大地簡化開發流程。
打開左側邊欄的 "Library Manager"(庫管理器)。
在搜索框中輸入 "RadioLib"。
找到由 "Jan Gromes" 開發的RadioLib庫,并點擊 "Install" (參考 下圖) 。
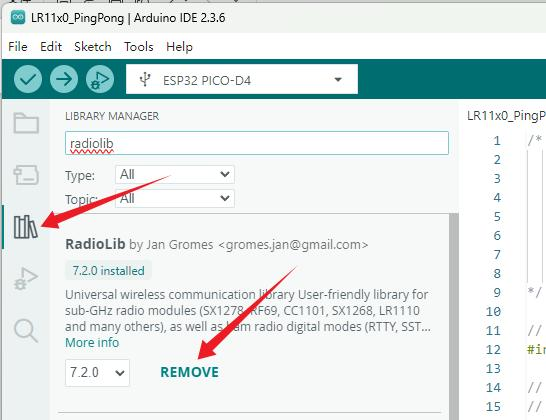
選擇RadioLib庫是一個重要的工程決策。它作為一個硬件抽象層(HAL),將底層復雜的寄存器讀寫操作封裝成易于理解和使用的函數。這意味著開發者無需深入研究LR1120芯片的數據手冊即可快速實現通信功能。此外,由于RadioLib支持多種射頻模塊(如SX127x, SX126x, CC1101等),為本項目編寫的代碼可以很方便地移植到其他硬件平臺,從而提高了代碼的可重用性和項目的靈活性 。
實現并分析“乒乓”通信測試
完成環境配置后,接下來通過一個“乒乓”通信示例來驗證硬件連接和軟件設置的正確性。該示例中,一個節點(發起節點)發送一個數據包,另一個節點(響應節點)接收到后會回復一個數據包,如此循環往復。
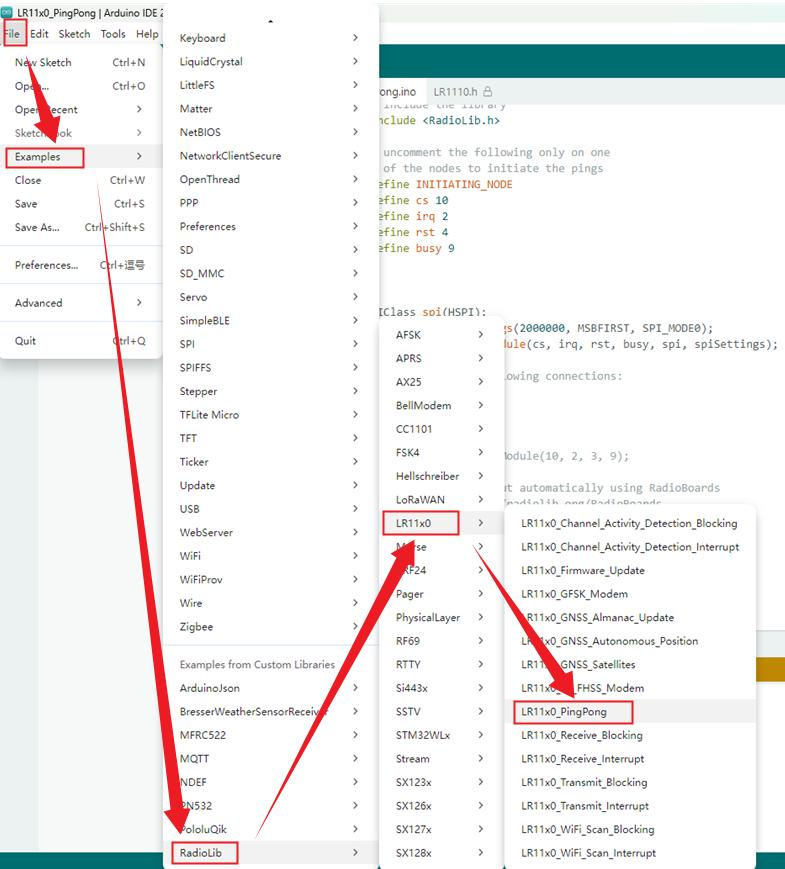
1 加載示例程序
在Arduino IDE中,通過菜單欄導航至 File > Examples > RadioLib > PhysicalLayer > LR11x0_PingPong 來打開示例代碼 (參考 下圖) 。
2 代碼走讀與分析
以下是對LR11x0_PingPong.ino 關鍵部分的分析。
節點角色定義:
// uncomment the following only on one
// of the nodes to initiate the pings
#defineINITIATING_NODE
此處的 #define INITIATING_NODE 宏定義是區分兩個節點角色的關鍵。同一份代碼需要被上傳到兩個ESP32設備上。在一個設備上,需要取消這一行的注釋,使其成為“發起節點”。在另一個設備上,保持這一行被注釋,它將自動成為“響應節點”。這是一種在嵌入式開發中非常常見且高效的技術,可以用單一代碼庫實現兩種不同的設備行為。
硬件引腳定義與SPI總線配置
C++
#definecs 10
#defineirq 2
#definerst 4
#definebusy 9
SPIClass spi(HSPI);
SPISettings spiSettings(2000000, MSBFIRST, SPI_MODE0);
引腳定義: #define 語句塊定義了ESP32與LoRa1120模塊連接的GPIO引腳。這里定義的數值(10, 2, 4, 9)必須與第二節中實際的硬件接線完全一致 。
SPI總線選擇: SPIClass spi(HSPI); 這行代碼指定了使用ESP32的哪個SPI外設。ESP32通常擁有多個SPI接口(如VSPI和HSPI)。此處明確選擇了HSPI。對于使用不同型號ESP32開發板的工程師來說,這是一個關鍵細節,因為不同開發板的SPI引腳分配可能不同。
SPI參數設置: SPISettings spiSettings(...) 用于配置SPI通信的參數。
2000000: 設置SPI時鐘速度為2 MHz。
MSBFIRST: 設置數據傳輸為最高有效位(Most Significant Bit)優先。
SPI_MODE0: 定義SPI的時鐘極性(CPOL=0)和時鐘相位(CPHA=0)。這些參數必須符合LR1120芯片的技術要求。
RadioLib對象實例化
C++
LR1120 radio = newModule(cs, irq, rst, busy, spi, spiSettings);
這是整個程序的核心部分。該行代碼創建了一個LR1120驅動的對象實例,名為 radio。在創建對象時,將前面定義的所有硬件引腳編號(cs, irq, rst, busy)和SPI配置對象(spi, spiSettings)作為參數傳入。這一步完成了軟件配置與物理硬件的最終鏈接。這種面向對象的設計體現了良好的軟件架構,將硬件相關的配置集中管理,使得代碼更易于維護和移植。
模塊初始化
C++
voidsetup(){
Serial.begin(115200);
// initialize LR1110 with default settings
Serial.print(" Initializing... ");
spi.begin();
intstate = radio.begin();
if(state == RADIOLIB_ERR_NONE) {
Serial.println("success!");
} else{
Serial.print("failed, code ");
Serial.println(state);
while(true);
}
}
在 setup() 函數中,radio.begin() 函數負責執行與LoRa1120模塊的初始通信。它會通過SPI接口對模塊進行一系列初始化配置,包括設置默認的LoRa參數(如頻率、帶寬、擴頻因子等),并檢查模塊是否正常響應。如果初始化成功,程序將繼續執行;否則,將打印錯誤代碼并進入死循環,方便開發者進行調試 。
3 固件編譯與上傳
在Arduino IDE的 Tools 菜單中,選擇正確的開發板(例如 "ESP32 PICO-D4")和對應的COM端口。
點擊IDE工具欄上的 "Upload"(上傳)按鈕。IDE將自動編譯代碼并將其燒錄到ESP32中 (參考 下圖)。
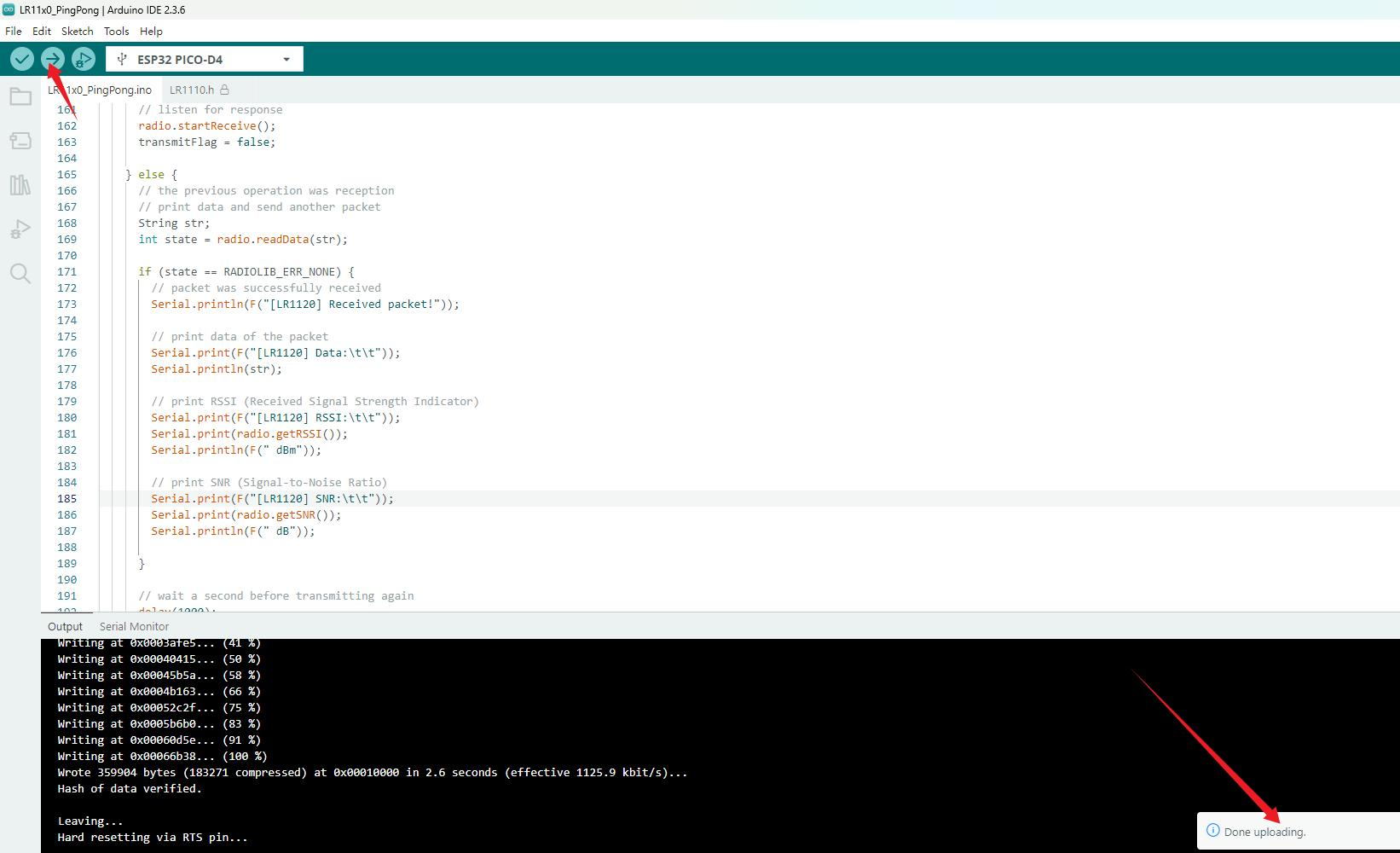
對兩個設備重復此操作(注意其中一個要取消 #define INITIATING_NODE 的注釋)。
驗證操作與解讀通信指標
固件上傳完成后,需要通過串口監視器來驗證通信是否成功,并理解輸出的關鍵性能指標。
訪問串口監視器
在Arduino IDE中,點擊右上角的放大鏡圖標或通過 Tools > Serial Monitor 打開串口監視器。
確保右下角的波特率設置為 115200,這必須與代碼中 Serial.begin(115200); 的設置相匹配。
分析輸出日志
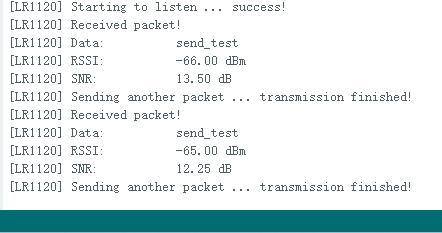
上電后,您應該能在兩個節點的串口監視器中看到類似以下的交替輸出 :
發起節點 (Initiating Node) (參考 下圖):
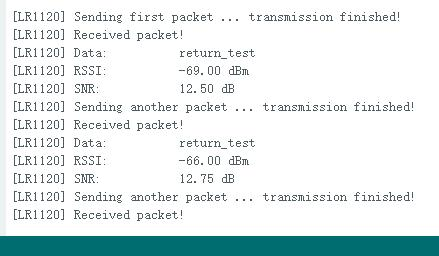
響應節點 (Responding Node) (參考 下圖):
技術指標解讀
輸出日志中的RSSI和SNR是衡量無線通信鏈路質量最重要的兩個指標。它們不僅僅是數字,更是診斷和優化無線系統的關鍵工具。
RSSI (Received Signal Strength Indicator, 接收信號強度指示):
定義: RSSI是接收端測量到的信號功率,單位為dBm。它是一個對數單位,值越接近0表示信號越強。例如,-66 dBm是一個非常強的信號,通常表示收發設備距離很近且無障礙物。
應用: RSSI直接反映了鏈路預算和通信距離。在實際部署中,通過監測RSSI的變化,可以判斷信號是否被遮擋、天線連接是否松動或設備是否超出了有效通信范圍。
SNR (Signal-to-Noise Ratio, 信噪比):
定義: SNR衡量的是目標信號強度與背景噪聲強度的比值,單位為dB。正值表示信號強度高于噪聲,值越大表示信號越清晰,抗干擾能力越強。例如,12.50 dB的SNR表示信號質量非常高。
LoRa的特點: LoRa調制技術的一個核心優勢是它能夠在負信噪比(即信號強度低于噪聲)的情況下成功解調數據。這是LoRa能夠實現遠距離通信的關鍵原因之一。示例中出現的高SNR值表明測試環境的電磁干擾非常小。
應用: 在實際環境中,如果RSSI值正常但SNR值很低或波動很大,通常意味著存在來自其他無線設備(如Wi-Fi路由器、藍牙設備等)的射頻干擾。通過分析SNR,可以幫助工程師選擇更干凈的信道或采取屏蔽措施。
通過教會工程師如何從診斷的角度思考這些指標,本指南旨在幫助他們解決實際部署中可能遇到的問題。例如,可以進行一個后續實驗:將兩個設備逐漸拉開距離,觀察RSSI的衰減;或將設備放置在Wi-Fi路由器旁邊,觀察SNR是否下降。這將一個簡單的驗證步驟轉變為一次關于射頻鏈路分析的實踐課程。
自定義硬件集成注意事項
當項目從原型驗證階段進入定制化產品設計階段時,工程師需要將LoRa1120模塊集成到自定義的PCB上。本節提供了進行硬件設計所需的關鍵數據和參考。
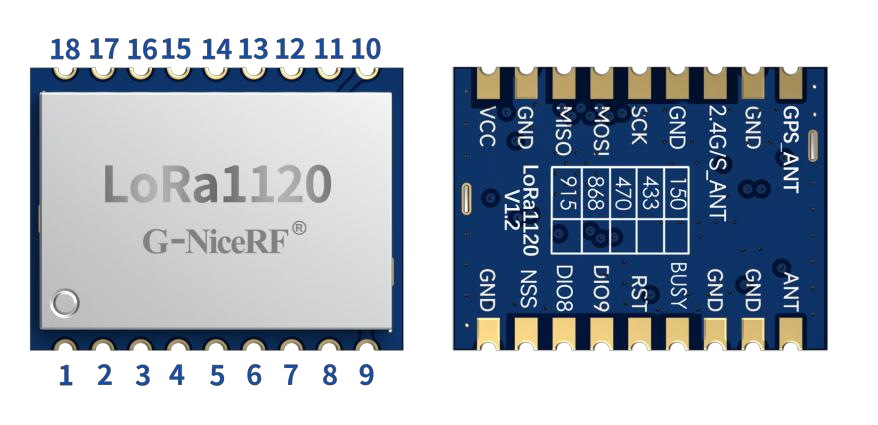
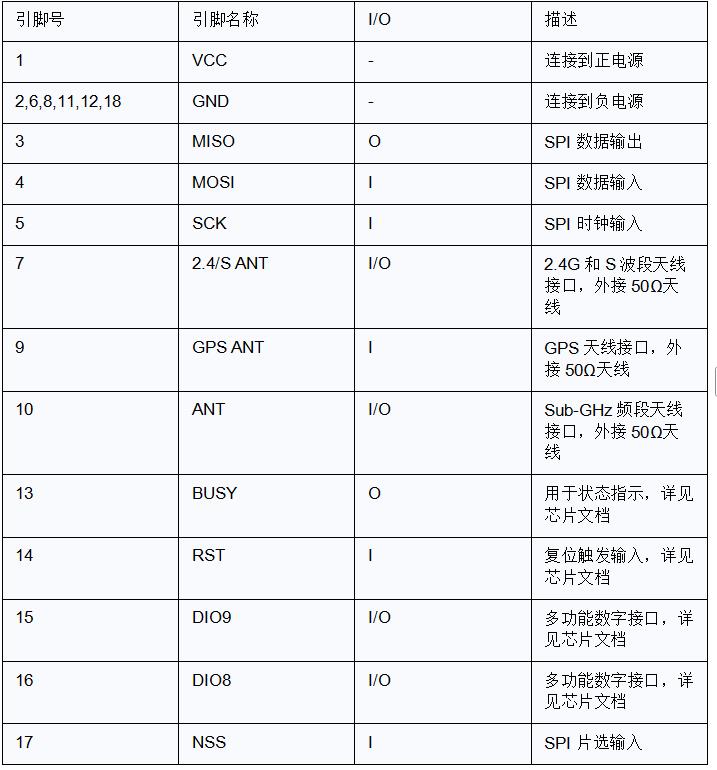
模塊引腳定義
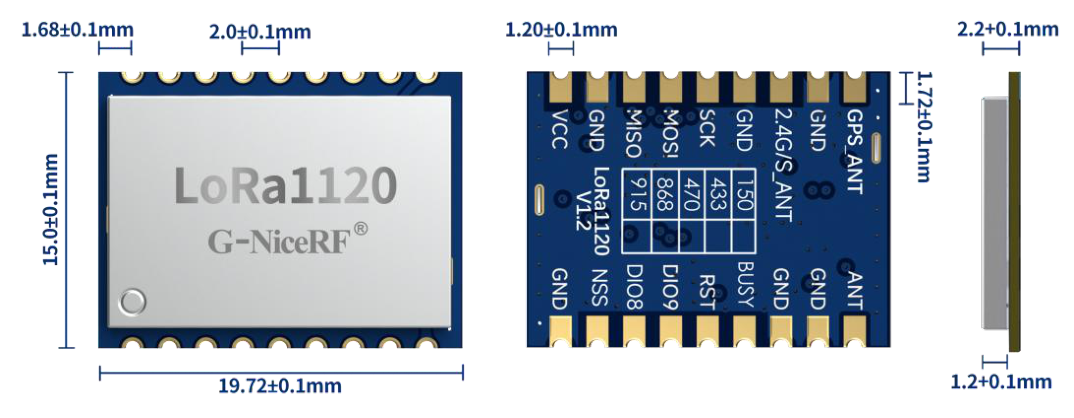
下圖 為LoRa1120模塊的引腳布局圖,可與下表對照參考:
機械尺寸與PCB布局
為了在EDA軟件(如Altium Designer, KiCad)中創建精確的PCB封裝(footprint),必須參考模塊的機械尺寸圖 。這確保了模塊能夠正確地焊接到PCB上 。
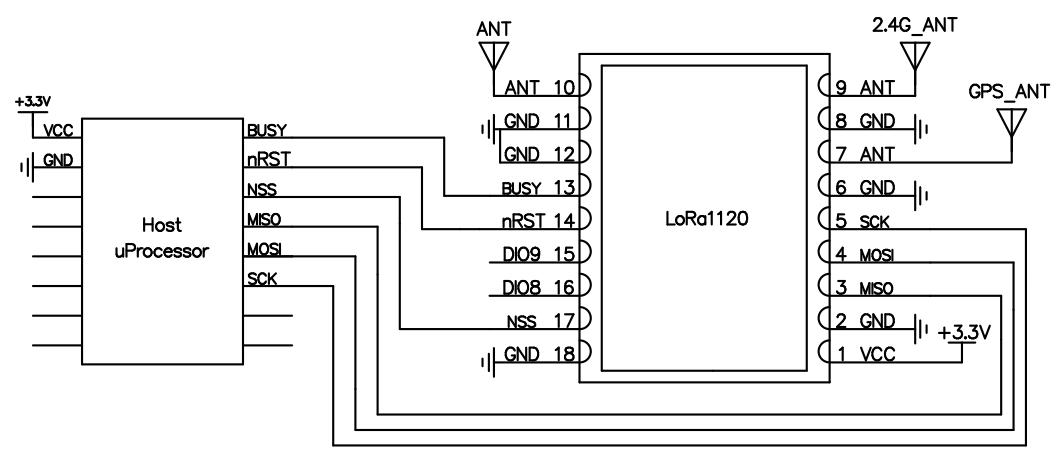
參考電路與功耗分析
在設計原理圖時,可以參考官方提供的典型應用電路 。應特別注意電源引腳旁的去耦電容配置和天線端口的匹配網絡設計,這對于實現最佳射頻性能和通過法規認證至關重要。
進行電源預算分析時,以下電氣特性是關鍵參考數據 :
| 參數 | 測試條件 | 典型值 | 單位 |
| 工作電壓范圍 | - | 1.8 - 3.6 | V |
| 發射電流 | @Sub-GHz, 21dBm | <110 | mA |
| 接收電流 | @Sub-GHz | <6 | mA |
| 睡眠電流 | @3.3V | <1 | μA |
其中,小于1 μA的睡眠電流是LoRa技術的核心優勢之一。這一極低的功耗特性使得基于LoRa1120的物聯網設備能夠依靠電池供電工作數年之久。在進行固件設計時,電源管理策略應圍繞這一點展開,即盡可能讓設備在完成數據收發任務后迅速進入深度睡眠模式,以最大限度地延長電池壽命。本節提供的數據,正是連接實驗原型與最終產品的橋梁。
焊接參考
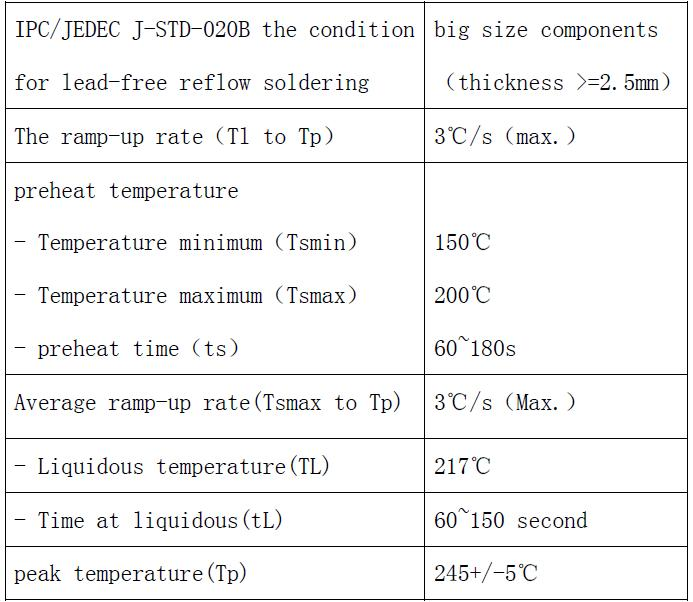
對于表面貼裝(SMT)工藝,建議遵循以下無鉛回流焊溫度曲線。
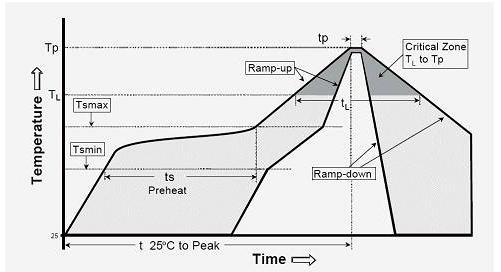
下表 詳細列出了符合IPC/JEDEC J-STD-020B標準的推薦參數。
結論
本報告系統地闡述了使用LoRa1120模塊和ESP32微控制器實現基礎點對點LoRa通信的全過程。內容涵蓋了從模塊技術特性分析、硬件系統連接、開發環境配置,到固件實現、通信驗證和關鍵性能指標解讀。
通過實踐證明,將LoRa1120模塊、功能強大的ESP32微控制器以及成熟的RadioLib軟件庫相結合,為開發遠距離、低功耗無線應用提供了一個堅實且高效的平臺。成功實現點對點通信鏈路,不僅驗證了硬件和軟件配置的正確性,也為開發者提供了一個經過驗證的基線。基于此基線,開發者可以進一步探索該模塊更高級的功能,例如構建LoRaWAN網絡應用、利用長距離跳頻擴頻(LR-FHSS)技術,以及開發其集成的GNSS和Wi-Fi地理定位功能。
-
點對點通信
+關注
關注
0文章
9瀏覽量
7599 -
LoRa
+關注
關注
355文章
1901瀏覽量
238149 -
ESP32
+關注
關注
26文章
1207瀏覽量
22056 -
LR1120
+關注
關注
0文章
6瀏覽量
559
發布評論請先 登錄
esp32物聯網的應用實例 LoRa網關制作、觸屏DIY電視、Sygic導航HUD
ESP32 Heltec lora pinout傳感器開源

LoRa模塊SX1278與ESP32結合使用的方法-上

LoRa模塊SX1278與ESP32結合使用的方法-下




 工商網監
工商網監
評論