") 相位、相位噪聲與抖動:從原理到測量
相位、相位噪聲與抖動:從原理到測量

一、相位與相位噪聲
相位(Phase):交流信號表達(dá)式A*sin(2πft + φ) 中的 φ為相位,描述的是“波形在時間軸上的位置”,它是一個瞬時量,單位是弧度(rad)。
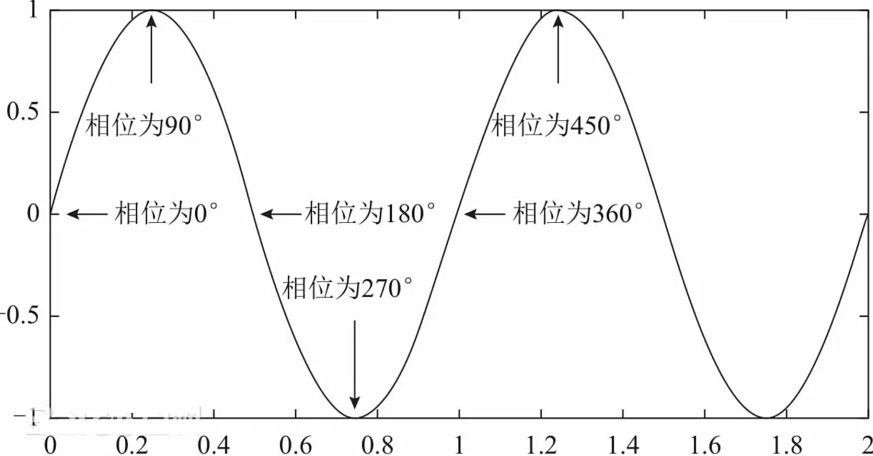
圖1 正弦信號的相位
在實際系統(tǒng)中,由于噪聲的影響,信號的相位會發(fā)生隨機(jī)變化,導(dǎo)致波形出現(xiàn)畸變。這種相位的隨機(jī)變化在時域稱之為“抖動”在頻域稱之為“相位噪聲”,它會使信號的頻譜展寬,影響信號的傳輸和處理,一句話區(qū)分相位與相位噪聲:相位是“靜態(tài)位置”,相位噪聲是“位置的隨機(jī)晃動”。
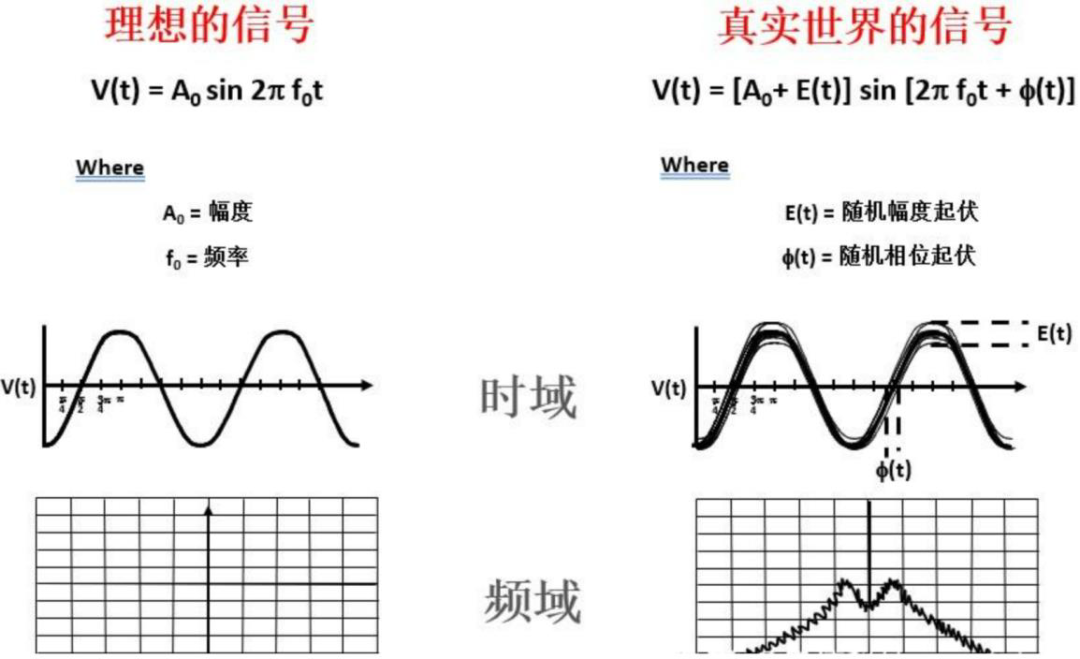
圖2 理想與真實世界的信號在頻域與時域表現(xiàn)形式
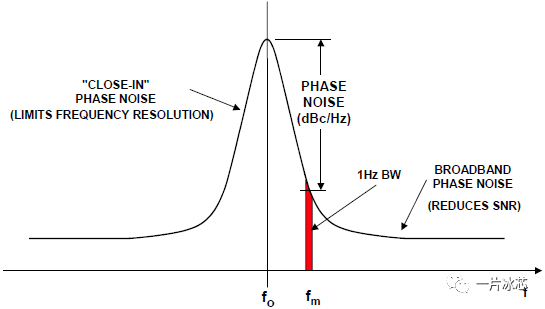
相位噪聲(Phase Noise):描述的是φ隨時間發(fā)生“快速、短期、隨機(jī)”的微小抖動,在頻域表現(xiàn)為載波頻譜的連續(xù)噪聲邊帶。在量化相位噪聲的眾多技術(shù)指標(biāo)中,最常用的測量指標(biāo)是“單邊帶(SSB) 相位噪聲”。
從數(shù)學(xué)角度來講,美國國家標(biāo)準(zhǔn)與技術(shù)研究院(NIST)將其定義為“偏離載波頻率處單位帶寬內(nèi)的單邊帶信號功率與載波信號總功率的比值”,由此我們可以總結(jié)出單邊帶相位噪聲的三要素:頻偏、單位HZ以及相對于載波。
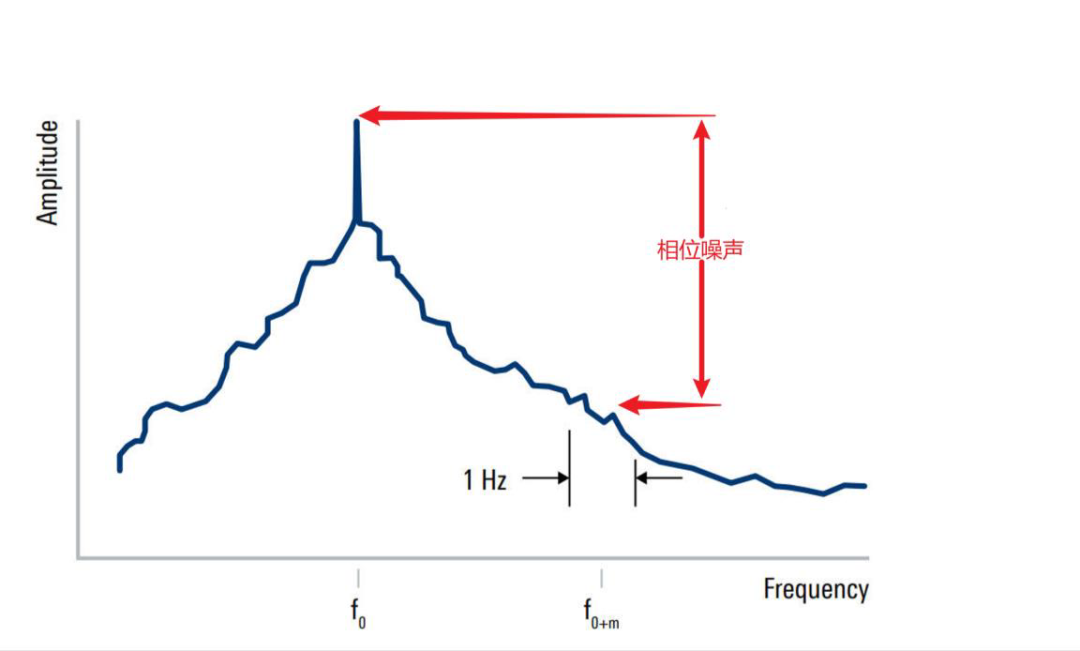
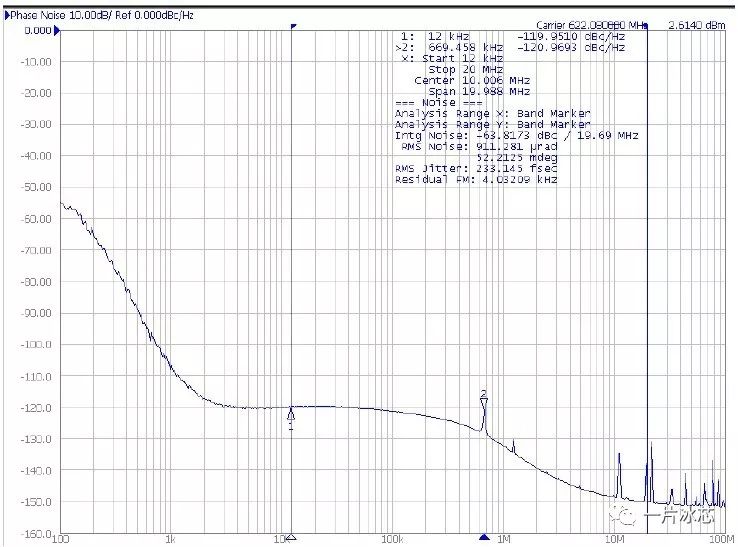
圖3 相位噪聲
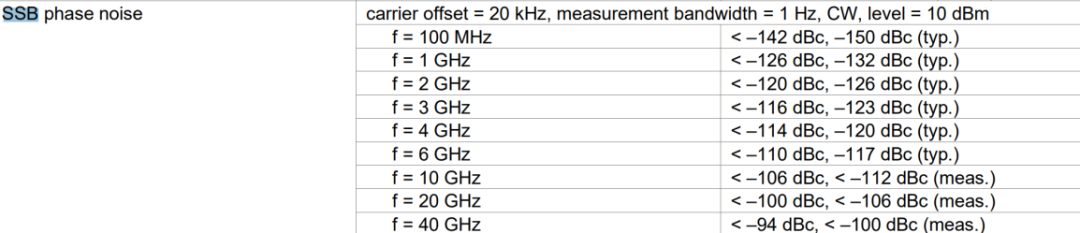
圖4 SMB100B射頻信號源不同中心頻率下,偏離載波20kHz的相位噪聲
二、相位噪聲與抖動:時頻域的雙生子
上文我們提到過,相位噪聲與抖動是同一物理現(xiàn)象在不同維度上的表現(xiàn)形式,本質(zhì)均源于信號源的噪聲特性。
相位噪聲是從頻域角度出發(fā),描述信號相位在頻率上的隨機(jī)波動特性,具體表現(xiàn)為信號頻譜在載波頻率附近的能量擴(kuò)散,這種擴(kuò)散會導(dǎo)致頻譜純度下降,常見于振蕩器、鎖相環(huán)等射頻與微波系統(tǒng)中。
抖動(Jitter)是從時域出發(fā),定義為“信號的各個有效瞬時對其當(dāng)時的理想位置的短期性偏離”,比如數(shù)字電路中信號的上升沿或下降沿在時間軸上的不穩(wěn)定跳動,見下圖5。
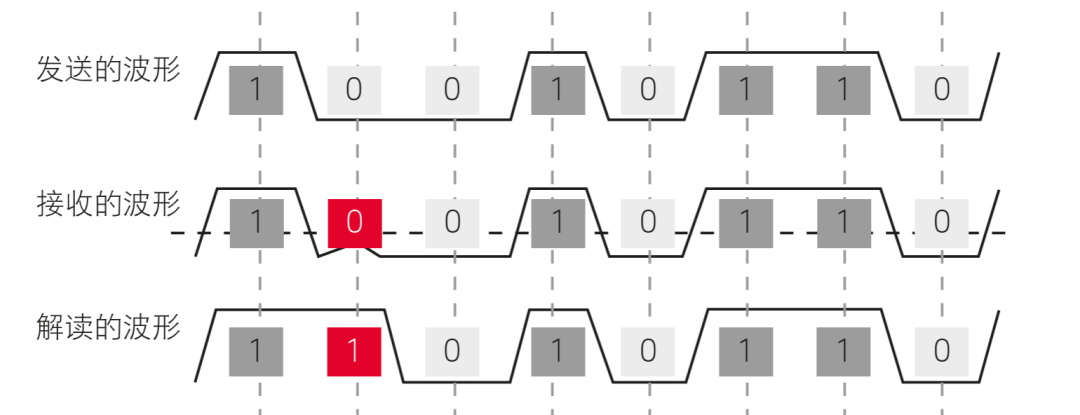
圖5 抖動會導(dǎo)致接收機(jī)錯誤地解讀被傳輸?shù)臄?shù)字?jǐn)?shù)據(jù)
抖動源通常分為兩類:“有界”和“無界”
有界抖動源會在可識別的時間間隔內(nèi)達(dá)到最大和最小的相位偏差值。這類抖動也叫“確定性抖動(DJ)”;它們是由系統(tǒng)和與數(shù)據(jù)相關(guān)的(系統(tǒng):輻射信號或傳導(dǎo)信號之間的串?dāng)_、散射效應(yīng)、阻抗失配,數(shù)據(jù):碼間干擾、占空比失真、偽隨機(jī)、比特序列周期性)抖動源而引發(fā)的。
無界抖動源在任何時間間隔內(nèi)都不會出現(xiàn)最大或最小的相位偏差,而且至少理論上,它們的抖動幅度會趨于無窮大。這類抖動也會被歸類為“隨機(jī)抖動(RJ)”。它們會因為隨機(jī)噪聲源(熱噪聲、散粒噪聲、粉紅噪聲)而引發(fā)。
三、測試設(shè)備選擇
1.主流測試設(shè)備
序號 | 測試參數(shù) | 主流測試設(shè)備 | 特點 | 推薦型號 |
|---|---|---|---|---|
1 | 相位 | 最高可到8路信號相位測試 | RTB2000系列 RTM3000系列 | |
雙通道頻率計 | 雙路信號測試(頻率≤200MHz) | 數(shù)英SS7406系列 | ||
矢量網(wǎng)絡(luò)分析儀 | 多通道高頻相位測試 | ZNLE系列 | ||
鎖相放大器 | 微小信號相位測試 | 蘇黎世MFLI-CN系列 | ||
2 | 相位噪聲 | 頻譜分析儀 | 一般相噪需求分析 | FPL系列 |
相位噪聲分析儀 | 超低相噪需求分析 | FSWP系列 | ||
3 | 抖動 | 示波器 | 時域眼圖、浴盆曲線、直方圖分析 | RTO6系列 |
相位噪聲分析儀 | 頻域抖動分析,發(fā)現(xiàn)抖動隨頻率發(fā)生的偏移變化 | FSWP系列 |
1.時域、頻域抖動分析比較
測試信號:載波為1GHz,調(diào)制頻率為1MHz的調(diào)頻信號,且伴有0Hz至4MHz的加性噪聲,測試設(shè)備分別使用FSWP系列相位噪聲分析儀與RTO6示波器。
設(shè)備 | FSWP系列 | RTO6 |
靈敏度 | ≤ 5 fs | 600 fs(抖動噪聲基底) |
檢測動態(tài)信號 | - | 使用跟蹤功能檢測 |
可測量的最大輸入頻率 | 最高56 GHz(單機(jī)) | 最高6 GHz |
混疊 | 無 | 是 |
近端測量 | 0.01 Hz | 受最大記錄長度的限制 |
在圖6頂部,RTO6測量波形顯示為軌跡函數(shù)(TIE 伴隨時間的變化趨勢)。中間的圖顯示的是軌跡函數(shù)的FFT。這個FFT顯示為PJ的抖動頻譜,代表的含義是信號的總體抖動 (TJ),單位為dBps。底部顯示測量到的TIE的柱狀圖。
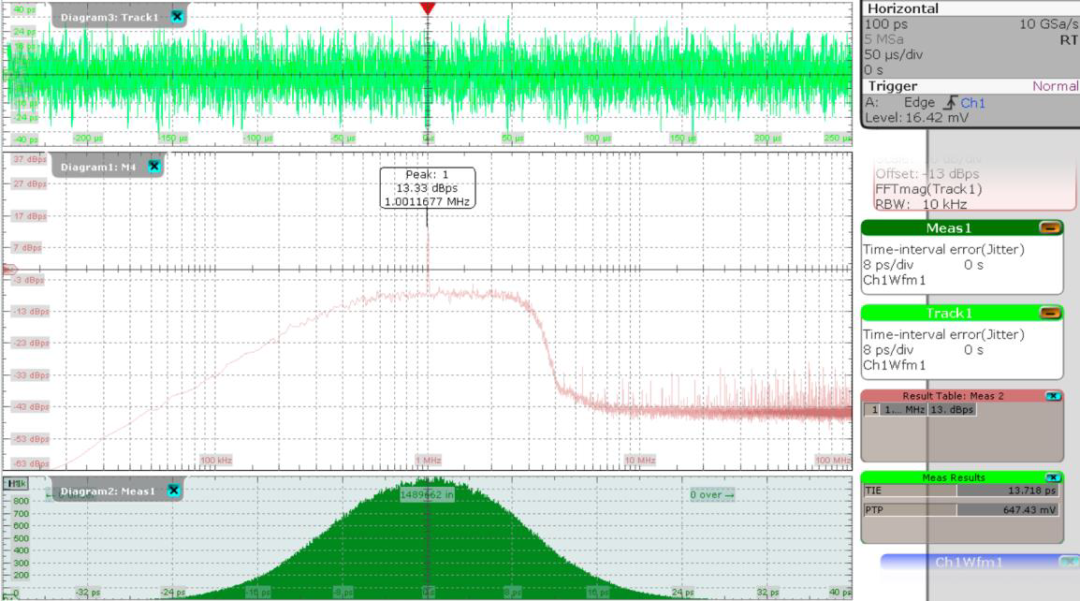
圖6 RTO6示波器測試抖動
圖7是以dBc/Hz為單位顯示的FSWP的測量結(jié)果。FSWP還計算每個雜散的PJ、總PJ和相位噪聲譜的RJ(單位為ps)。
為了比較結(jié)果,將兩個測量結(jié)果的單位都轉(zhuǎn)換為ps。此外,RTO6的隨機(jī)抖動和FSWP的總體抖動使用以下公式進(jìn)行計算:
TJ2=RJ2+PJ2
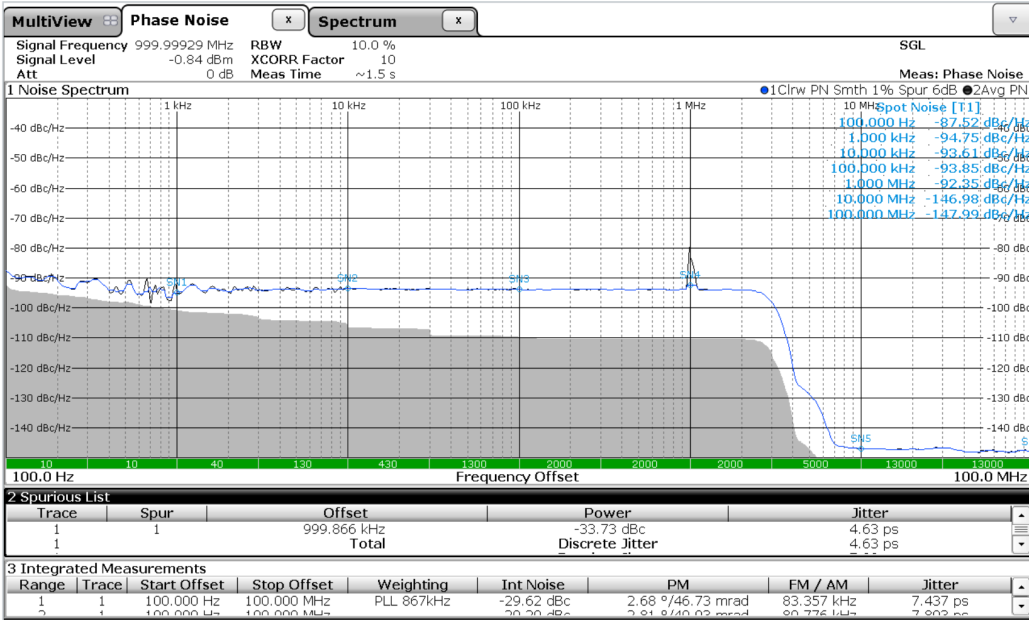
圖7 FSWP相位噪聲分析儀測試抖動
下表顯示了各個測量結(jié)果和差異,RTO6和FSWP結(jié)果幾乎完全相同。它們測量到的PJ的頻率相同,并且測量值的差異小于0.5ps。檢測到的RJ和TJ值的差異小于0.5ps。這種良好的一致性證明了這兩種儀器具有可比性。
測量結(jié)果 | ||||
參數(shù) | 頻率 | RTO6 | FSWP | 差值 |
周期性抖動 | 1.0 MHz | 4.64 ps | 4.63 ps | 0.01 ps |
隨機(jī)抖動 (平均值) | 7.34 ps | 7.44 ps | 0.10 ps | |
總體抖動 (平均值) | 8.68 ps | 8.76 ps | 0.08 ps | |
-
抖動
+關(guān)注
關(guān)注
1文章
72瀏覽量
19407 -
相位
+關(guān)注
關(guān)注
0文章
86瀏覽量
30073 -
測量
+關(guān)注
關(guān)注
10文章
5658瀏覽量
116805 -
相位噪聲
+關(guān)注
關(guān)注
2文章
196瀏覽量
23784
發(fā)布評論請先 登錄
抖動傳遞性能和相位噪聲測量技術(shù)
相位噪聲的RMS抖動
什么是相位噪聲?常見的相位噪聲源有哪些?
測量較低時鐘頻率的相位噪聲和相位抖動
時鐘抖動(CLK)和相位噪聲之間的轉(zhuǎn)換


應(yīng)對高速芯片從相位噪聲到時間抖動的挑戰(zhàn)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論