") 解讀安森美智能移動(dòng)機(jī)器人解決方案
解讀安森美智能移動(dòng)機(jī)器人解決方案

與傳統(tǒng)工業(yè)機(jī)器人不同,智能機(jī)器人運(yùn)用多種傳感器、人工智能及先進(jìn)算法,能夠與環(huán)境互動(dòng)、檢測(cè)障礙物,并與人類及其他機(jī)器協(xié)同工作。部署自主機(jī)器人有助于提升生產(chǎn)力與效率:它們可承擔(dān)重復(fù)性或耗時(shí)任務(wù),讓人類工人得以專注于增值活動(dòng)。輕負(fù)載場(chǎng)景下,系統(tǒng)可采用 12 V電池供電;較高電壓(如 48 V)則能降低工作電流,從而減小導(dǎo)線尺寸并節(jié)約成本。目前,智能機(jī)器人主要應(yīng)用于倉(cāng)庫(kù)、生產(chǎn)工廠等受控環(huán)境,但其戶外作業(yè)的應(yīng)用趨勢(shì)正不斷擴(kuò)大。
框圖
頂層拓?fù)?/p>
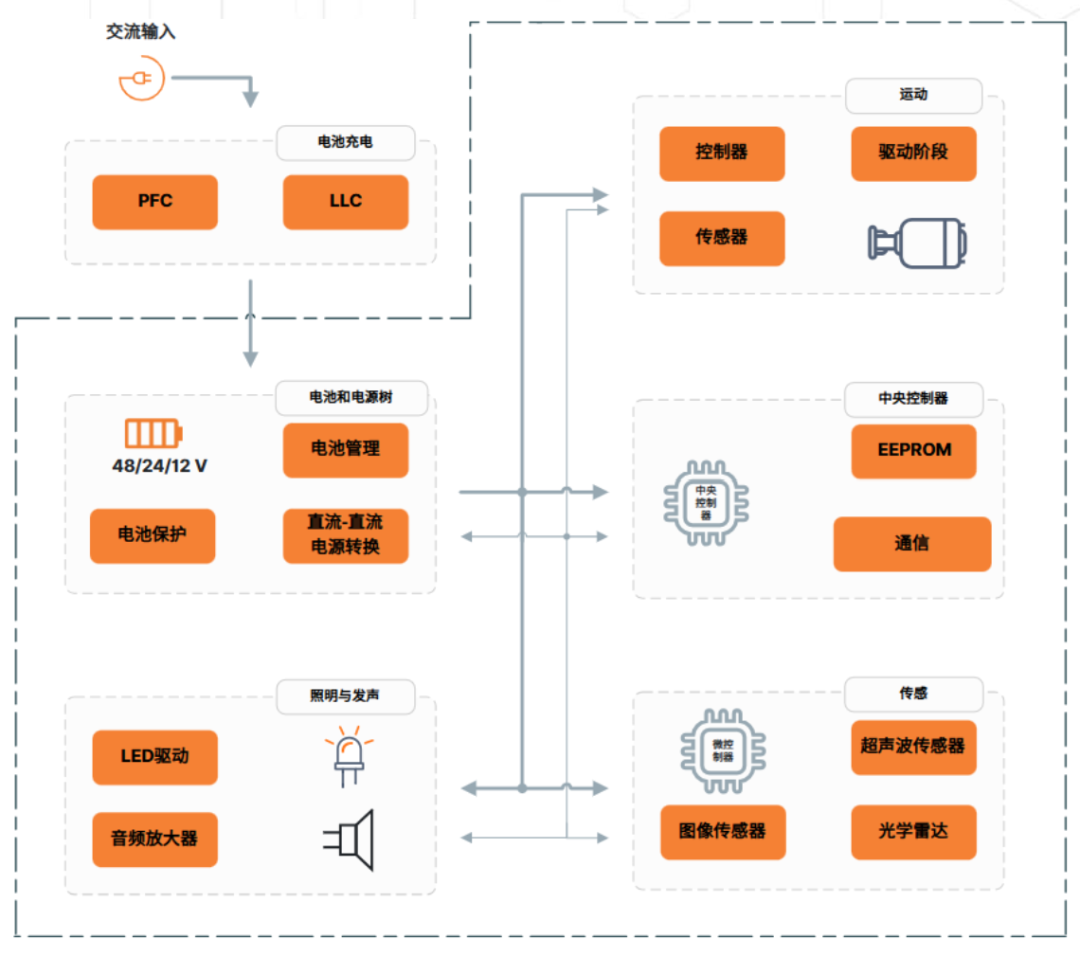
下面的框圖展示了安森美 (onsemi)打造的智能移動(dòng)機(jī)器人方案。 機(jī)器人系統(tǒng)由多個(gè)相互連接的子模塊構(gòu)成, 主要包括電池管理、 運(yùn)動(dòng)控制、 感測(cè)和中央處理器 (CPU) 等子模塊。 這些子模塊方案與具體的應(yīng)用場(chǎng)景緊密相關(guān):例如,僅在內(nèi)部作業(yè)的機(jī)器人所需的傳感器數(shù)量較少;而搭載機(jī)械臂的機(jī)器人則需要配備更多電機(jī)逆變器。
方案概述
連接(取代 CAN)
AMR 中的 CPU 和所有構(gòu)建塊需要相互通信。 通信手段有許多種。傳統(tǒng)上, 使用的是 CAN、 LIN、 RS-485、 RS232和許多其他方式。 所有這些都可以用 10Base-T1S 取代。
它是 IEEE 在 802.3cg 第 147 條規(guī)范中指定的以太網(wǎng)協(xié)議。 借助 10BASE-T1S, 僅使用一根雙絞線便可將多個(gè)PHY 連接到公共總線。 這減少了所需的交換機(jī)端口數(shù)量,并且無需網(wǎng)關(guān)。 由于 10BASE-T1S 只需要一根非屏蔽雙絞線, 因此布線成本也大大降低。
此外, 10BASE-T1S 的通信速度可達(dá) 10Mbps, 高于迄今為止的許多方案(例如, LIN 最高為 20Kbps, CAN 最高為約 1Mbps) 。
任何節(jié)點(diǎn)都可以向/從任何其他節(jié)點(diǎn)發(fā)送/接收以太網(wǎng)幀, 類似于傳統(tǒng)的以太網(wǎng) LAN。
在多分支拓?fù)渲羞\(yùn)行時(shí), 物理層沖突避免 (PLCA) 特性可以避免數(shù)據(jù)包沖突。 節(jié)點(diǎn)會(huì)根據(jù)各自的ID 輪流(一次一個(gè)) 在總線上進(jìn)行傳輸。 PLCA 周期不是固定的, 取決于待處理的數(shù)據(jù)。
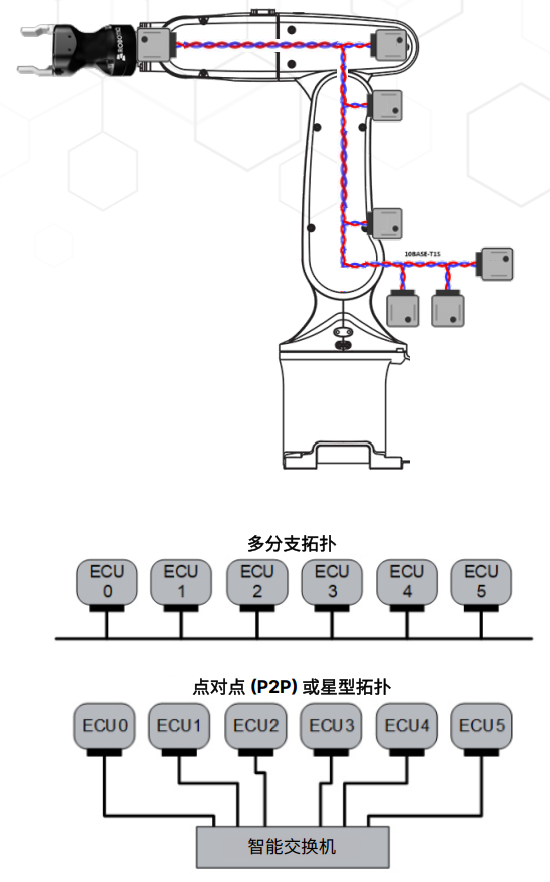
圖 1:多分支與點(diǎn)對(duì)點(diǎn)網(wǎng)絡(luò)拓?fù)?/p>
以太網(wǎng)控制器 NCN26010
10Mb/s 工業(yè)以太網(wǎng) MAC+PHY IC 控制器
符合 10BASE-T1S – IEEE 802.3cg 標(biāo)準(zhǔn)
集成 MAC 和 10BASE-T1S PHY
PLCA 突發(fā)模式 – 如果某個(gè)節(jié)點(diǎn)需要發(fā)送比所有其他節(jié)點(diǎn)都多的數(shù)據(jù), 則允許該節(jié)點(diǎn)在每次 PLCA 傳輸機(jī)會(huì)中發(fā)送更多幀
支持 8 個(gè)以上節(jié)點(diǎn), UTP 線纜傳輸距離超過 25m
增強(qiáng)抗噪聲能力
全局唯一 MAC 地址
32 引腳 QFN 封裝

圖 2: 10BASE-T1S MACPHY 評(píng)估套件
電感式位置檢測(cè)
位置傳感器會(huì)測(cè)量輪子或其他運(yùn)動(dòng)部件的旋轉(zhuǎn), 以準(zhǔn)確跟蹤它們?cè)诃h(huán)境中的位置和方向。 這些傳感器可用作 BLDC 控制電子換向的一部分。 電感式編碼器相比傳統(tǒng)的光學(xué)或磁檢測(cè)有許多優(yōu)勢(shì)。
電感式檢測(cè)穩(wěn)健、 輕便、 只需很少的元件, 并且對(duì)振動(dòng)或污染不敏感。
電感式檢測(cè) NCS32100
非接觸式傳感器方案, 由兩片 PCB 組成:一個(gè)帶有兩個(gè)印刷電感器(無焊接元件) 的轉(zhuǎn)子, 以及一個(gè)帶有印刷電感器和編碼器 IC 的定子。
傳統(tǒng)光學(xué)編碼器方案可能需要 100 多個(gè)元件才能正常工作, 與之相比, 安森美 NCS32100 僅需 12 個(gè)元件即可實(shí)現(xiàn)最小功能系統(tǒng)。
計(jì)算位置和速度
絕對(duì)編碼器 - 無需移動(dòng)即可確定位置
6,000 RPM 全精度(最大 45,000 RPM)
對(duì)于 38mm 傳感器,精度為 +/- 50 角秒(0.0138度)或更高
可以區(qū)分并抑制旋轉(zhuǎn)運(yùn)動(dòng)產(chǎn)生的振動(dòng)
20 位單圈分辨率輸出, 24 位多圈
集成 CortexM0+ MCU – 高度可配置
為廣泛的光學(xué)編碼器提供成本更低的替代方案
自校準(zhǔn) - 只需一個(gè)命令
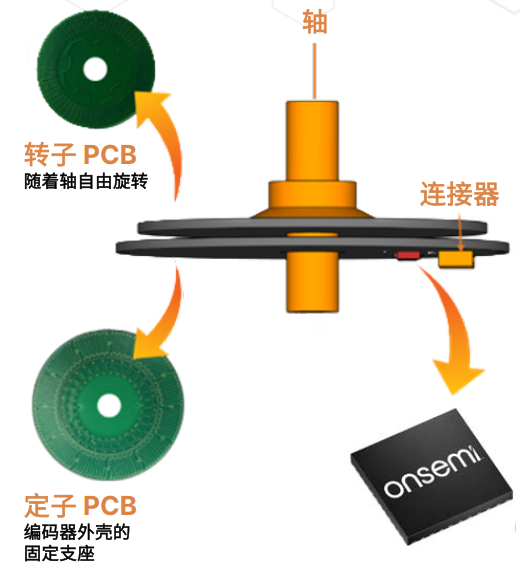
圖 3: NCS32100 傳感器方案
NCS32100 設(shè)計(jì)工具
安森美提供了大量設(shè)計(jì)工具,助力電感檢測(cè)系統(tǒng)的設(shè)計(jì),包括:自校準(zhǔn)程序、固件及 PCB 參考設(shè)計(jì)文件/電氣連接與固件的參考指南等。
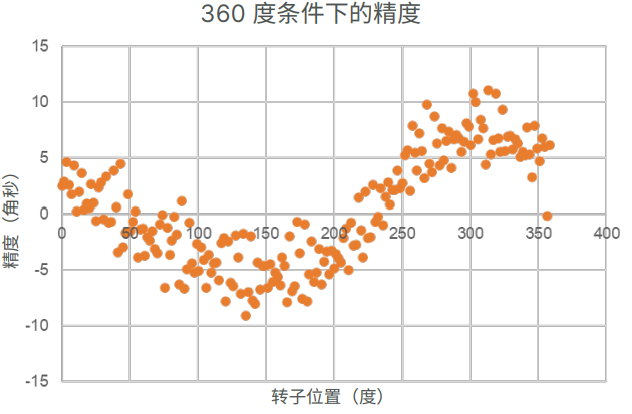
圖 4: NCS32100 測(cè)量精度
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31263瀏覽量
223188 -
安森美
+關(guān)注
關(guān)注
33文章
1989瀏覽量
95732 -
移動(dòng)機(jī)器人
+關(guān)注
關(guān)注
2文章
819瀏覽量
34915
原文標(biāo)題:安森美一站式移動(dòng)機(jī)器人方案,助力機(jī)器人智能化新突破
文章出處:【微信號(hào):onsemi-china,微信公眾號(hào):安森美】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
安森美智能機(jī)器人解決方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論