 舵機如何控制?
舵機如何控制?

舵機是一種高精度的角度控制執行器,廣泛應用于機器人、遙控模型、自動化設備等場景。其控制核心是通過PWM(脈沖寬度調制)信號調節角度,配合內部閉環反饋實現精準定位。以下從原理、控制方式、關鍵參數及注意事項展開說明:
一、舵機控制的核心原理
舵機內部集成了直流電機、減速齒輪組、電位器(角度傳感器)和控制電路,形成閉環控制系統:
信號接收:外部輸入 PWM 信號,控制電路解析信號中的脈沖寬度,確定目標角度。
反饋對比:電位器實時檢測當前角度,并將信號反饋給控制電路。
驅動調節:控制電路對比目標角度與當前角度,驅動直流電機正轉或反轉,通過減速齒輪組帶動輸出軸轉動。
停止定位:當當前角度與目標角度一致時,電機停止轉動,實現精準定位。
二、控制信號:PWM 參數的關鍵要求
舵機的控制完全依賴 PWM 信號的參數,核心參數包括頻率(周期) 和脈沖寬度:
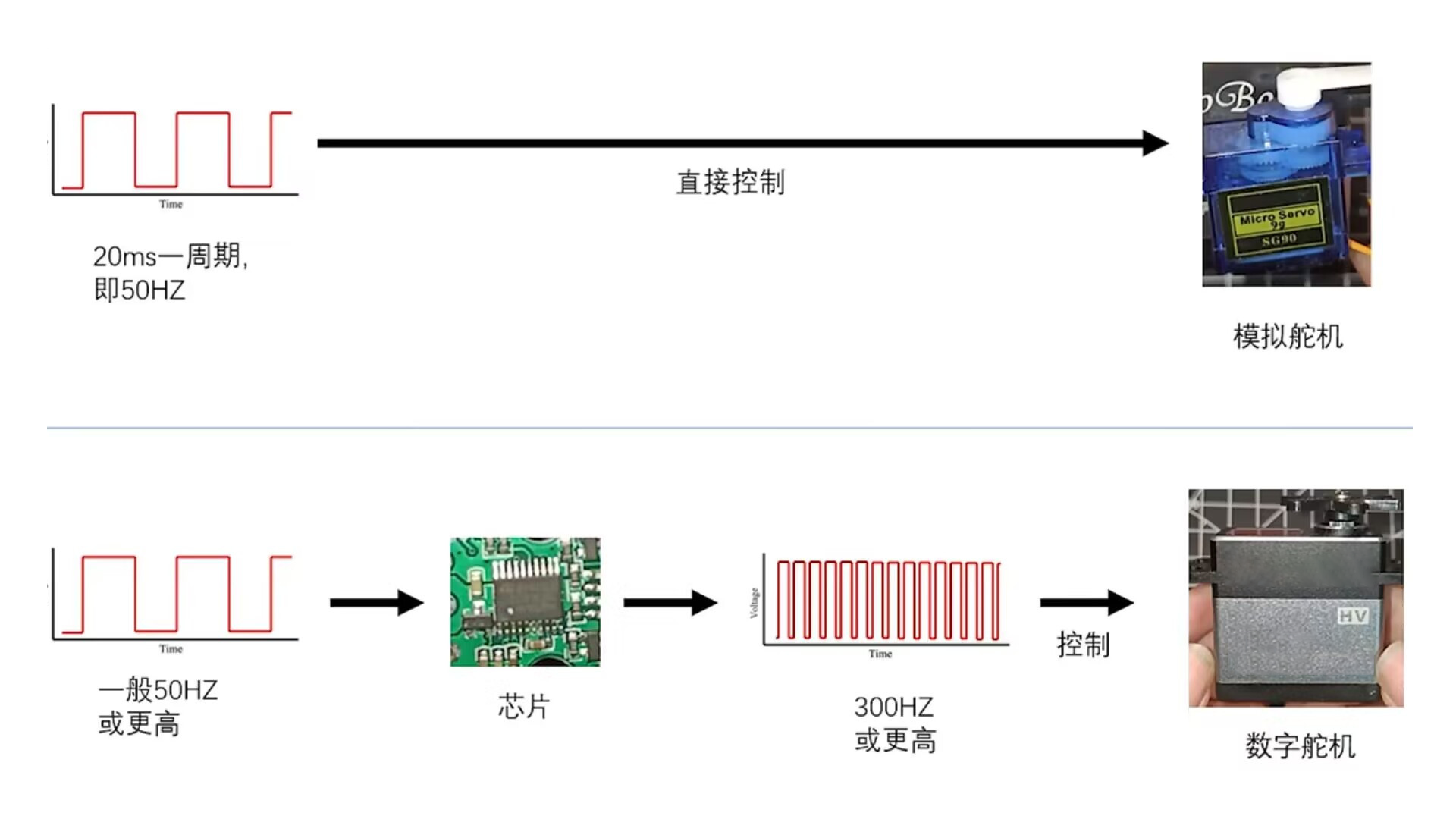
1. 頻率(周期)
標準舵機的 PWM 信號頻率為 50Hz(即周期為 20ms),這是行業通用標準。
部分高性能舵機支持更高頻率(如 100Hz),但需參考具體型號手冊,過高頻率可能導致舵機過熱或失控。
2. 脈沖寬度與角度的對應關系
PWM 信號的脈沖寬度(高電平持續時間)直接決定舵機的輸出角度,不同脈沖寬度對應不同角度,典型范圍如下(不同型號可能略有差異):
| 脈沖寬度(ms) | 對應角度(°) | 說明 |
|---|---|---|
| 0.5ms | 0° | 最小角度(左極限) |
| 1.5ms | 90° | 中間角度(中立位) |
| 2.5ms | 180° | 最大角度(右極限) |
脈沖寬度與角度呈線性關系:例如,1.0ms 對應 45°,2.0ms 對應 135°,可通過公式計算任意角度對應的脈沖寬度:脈沖寬度(ms)=0.5+180目標角度(°)?×2.0
注意:不同舵機的角度范圍可能不同(如 90°、270°),需根據型號調整脈沖寬度范圍(例如 90° 舵機可能對應 1.0ms~2.0ms)。
三、常見控制方式與硬件實現
舵機的控制需通過硬件生成符合參數的 PWM 信號,常見方式包括單片機直接控制、專用模塊控制等:
1. 單片機 / 微控制器直接控制(適合單舵機或少量舵機)
通過單片機(如 Arduino、STM32、ESP32 等)的 PWM 輸出引腳直接生成信號,步驟如下:
硬件連接:舵機的信號線(通常為橙色 / 黃色)接單片機 PWM 引腳,電源線(紅色)接 5V 電源,地線(棕色 / 黑色)接單片機地線(共地)。
軟件編程:通過代碼配置 PWM 頻率為 50Hz,并設置對應角度的脈沖寬度。
示例(Arduino 使用Servo庫):
cpp
#include
Servo myservo; // 創建舵機對象
int angle = 0; // 目標角度
void setup() {
myservo.attach(9); // 舵機信號線接數字引腳9
}
void loop() {
for (angle = 0; angle <= 180; angle += 1) { // 從0°轉到180°
myservo.write(angle); // 發送角度信號(內部自動轉換為PWM)
delay(15); // 延遲等待轉動到位
}
for (angle = 180; angle >= 0; angle -= 1) { // 從180°轉回0°
myservo.write(angle);
delay(15);
}
}
原理:Servo庫自動將角度轉換為對應脈沖寬度(如write(90)對應 1.5ms 脈沖),并生成 50Hz 的 PWM 信號。
2. 專用舵機控制模塊(適合多舵機或高精度場景)
當需要控制多個舵機(如機器人關節)時,單片機的 PWM 引腳可能不足,此時可使用專用模塊(如 PCA9685):
優勢:通過 I2C 通信控制,單個模塊可驅動 16 路舵機,且支持頻率和脈沖寬度精準調節,減少單片機資源占用。
硬件連接:模塊通過 I2C 引腳(SDA、SCL)與單片機連接,舵機電源需外接(避免單片機供電不足)。
控制邏輯:通過 I2C 指令設置模塊的頻率(50Hz)和每路舵機的脈沖寬度,示例代碼(Arduino 控制 PCA9685):
cpp
#include #include Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(); // 初始化模塊 #define SERVOMIN 150 // 0.5ms對應的脈沖值(需校準) #define SERVOMAX 600 // 2.5ms對應的脈沖值(需校準) void setup() { pwm.begin(); pwm.setPWMFreq(50); // 設置頻率為50Hz } void loop() { // 控制第0路舵機轉到90°(脈沖寬度1.5ms,對應(150+600)/2=375) pwm.setPWM(0, 0, 375); delay(1000); }
3. 其他控制方式
遙控器控制:遙控模型中,通過接收機輸出 PWM 信號直接驅動舵機,無需編程。
PLC 或工業控制器:工業場景中,通過 PLC 的 PWM 模塊或模擬量轉 PWM 模塊控制舵機。
四、控制中的關鍵注意事項
電源供電:
舵機轉動時電流較大(尤其是大扭矩型號),需單獨供電(5V/2A 以上),避免與單片機共用電源導致電壓跌落,影響控制信號穩定性。
角度范圍校準:
不同舵機的實際角度范圍可能與理論值有偏差,需通過測試確定最小 / 最大脈沖寬度(例如部分舵機 0° 對應 0.6ms,180° 對應 2.4ms),避免強行轉動導致齒輪損壞。
信號干擾:
PWM 信號線應遠離強電或高頻信號線路(如電機線),必要時使用屏蔽線,防止信號干擾導致角度漂移。
負載與轉速:
舵機的扭矩和轉速有額定值,負載超過扭矩會導致無法轉動或過熱;快速轉動時需預留足夠延遲時間(如delay(15)),避免未到位時再次發送信號。
審核編輯 黃宇
-
舵機
+關注
關注
17文章
377瀏覽量
43329
發布評論請先 登錄
在昉·星光開發板上通舵機控制板實現機器人舵機控制
SG90舵機控制秘籍:參數、電源與信號的三大要點,為您綜合分析了SG90舵機的控制參數注意事項



PWM信號是如何控制舵機的?
拳力以赴!基于 RT-Thread 與瑞薩 VisionBoard 的 AIoT 猜拳系統實戰 | 技術集結

【RA4M2-SENSOR】+PWM與舵機控制
舵機怎么控制正反,舵機怎么使用?
舵機的原理
PWM 型號舵機控制方法!
【RA-Eco-RA6M4開發板評測】+PWM與舵機控制
【嘉楠堪智K230開發板試用體驗】01 Studio K230開發板Test1——舵機控制
從模擬到數字:舵機控制技術的飛躍!



 工商網監
工商網監
評論