") HJMR2300三軸數(shù)字磁強計產品介紹
HJMR2300三軸數(shù)字磁強計產品介紹

01概述
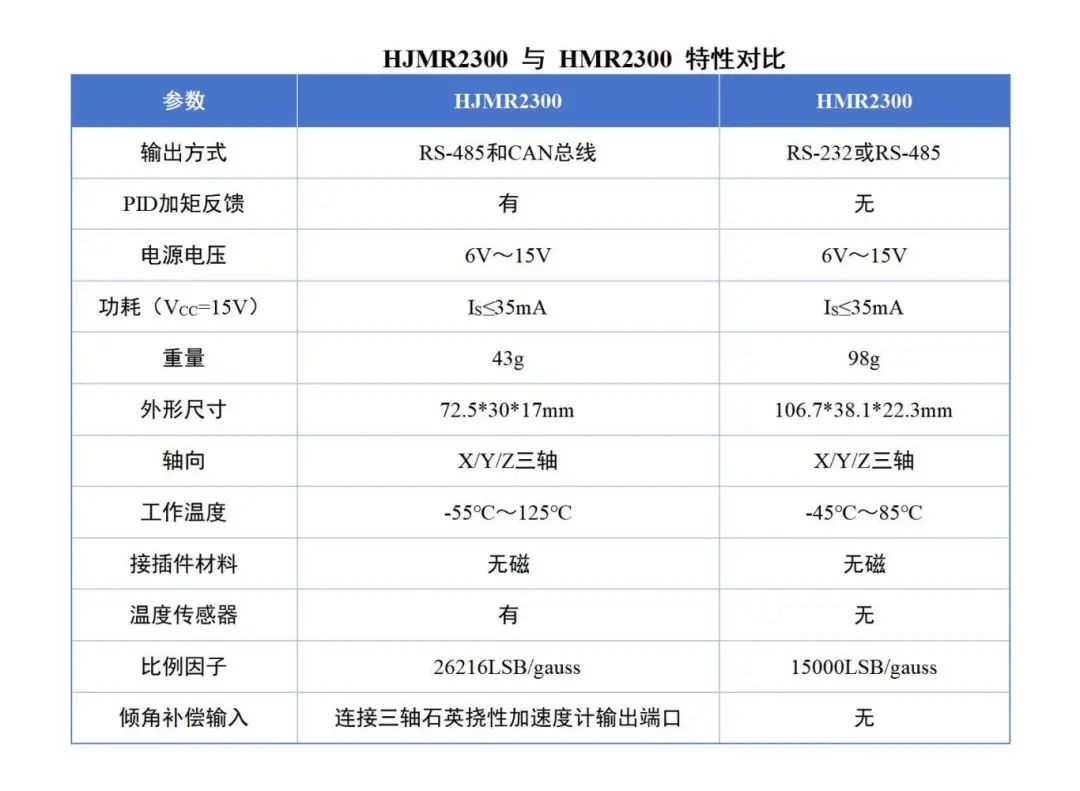
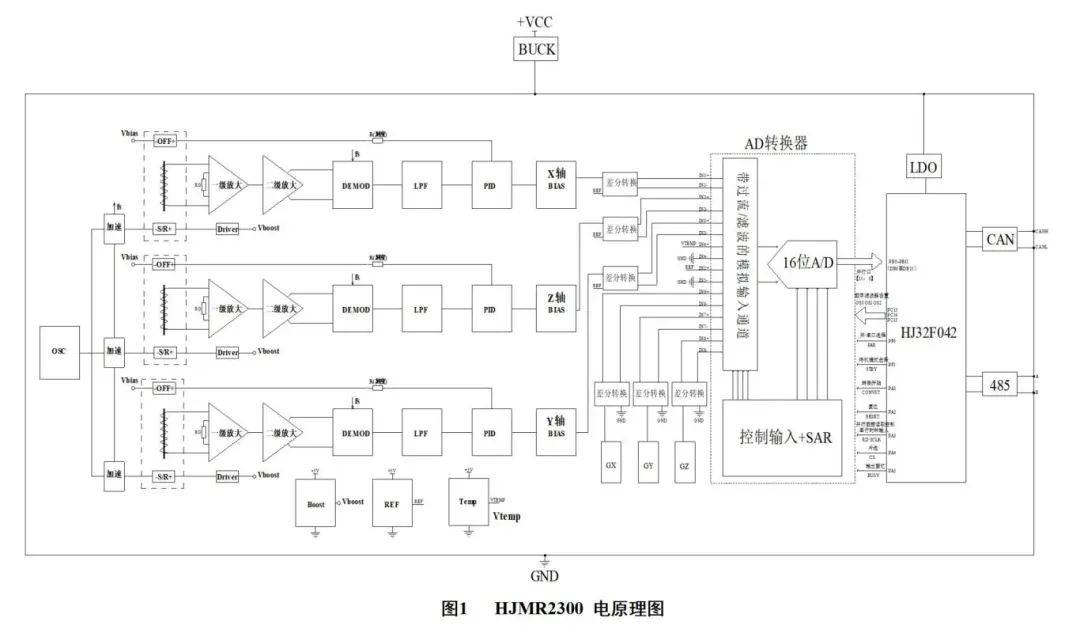
HJMR2300是一款全國產高精度三軸數(shù)字磁強計,用于檢測磁場的強度和方向。HJMR2300內部由三軸高精度弱磁測量模塊和16位AD采集系統(tǒng)組成,其中三軸高精度弱磁測量模塊采用了調制解調技術和PID加矩反饋技術(航晶微電子專利),使得磁傳感器探頭一直工作在零高斯附近,從而減小零位時漂(dK0/dT)和二次非線性(K2)。通過周期性的置位/復位,使磁疇有序排列,從而能達到抵制外界強磁干擾和提高分辨率的目的。另外16位AD采集系統(tǒng)為8通道16位差分輸入A/D采集系統(tǒng),由輸入箝位、二階抗混疊模擬濾波器、采樣/保持器、16位電荷再分布逐次逼近ADC、可編程數(shù)字濾波器、高速并行接口、精密參考源、低壓差調整源、系統(tǒng)集成處理器(ISP)、驅動器等組成,全國產化替代進口HMR2300。
HJMR2300可以測量地磁場的X軸、Y軸和Z軸磁場矢量分量,三軸高精度弱磁測量模塊的模擬輸出通過內部的16位AD采集系統(tǒng),轉換為16位數(shù)字量,預留的三個通道用于采集三軸石英撓性加速度計信號,方便客戶進行傾角補償。數(shù)據(jù)輸出為半雙工RS-485(波特率9600)及CAN總線輸出(速率250Ksps),廣泛應用于航空、船舶自主導航,可直接接入AHRS系統(tǒng),GPS備份系統(tǒng),遠程車輛監(jiān)控,無人機,衛(wèi)星姿態(tài)測控,以及石油隨鉆測斜等場合。
02電原理圖
03封裝形式及引出端功能
封裝形式:
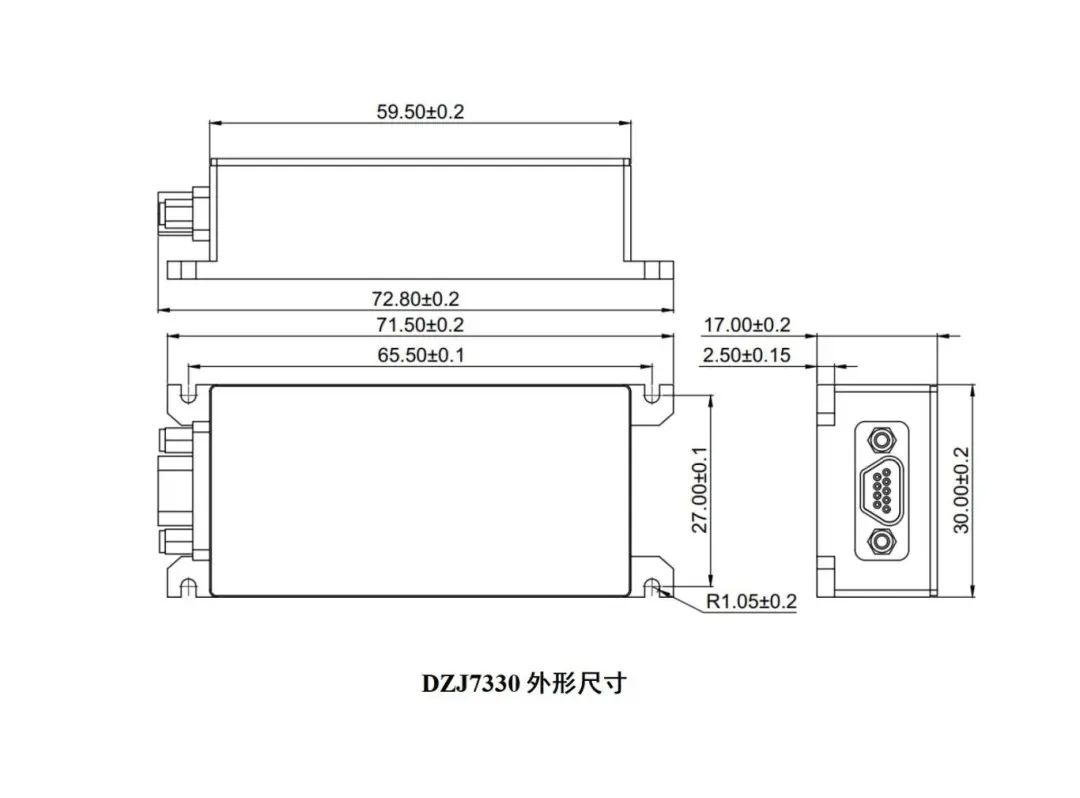
HJMR2300采用DZJ7230無磁金屬封裝。封裝尺寸圖和實物圖如下:

引出端功能(采用J30J-9TJP無磁航空插頭):

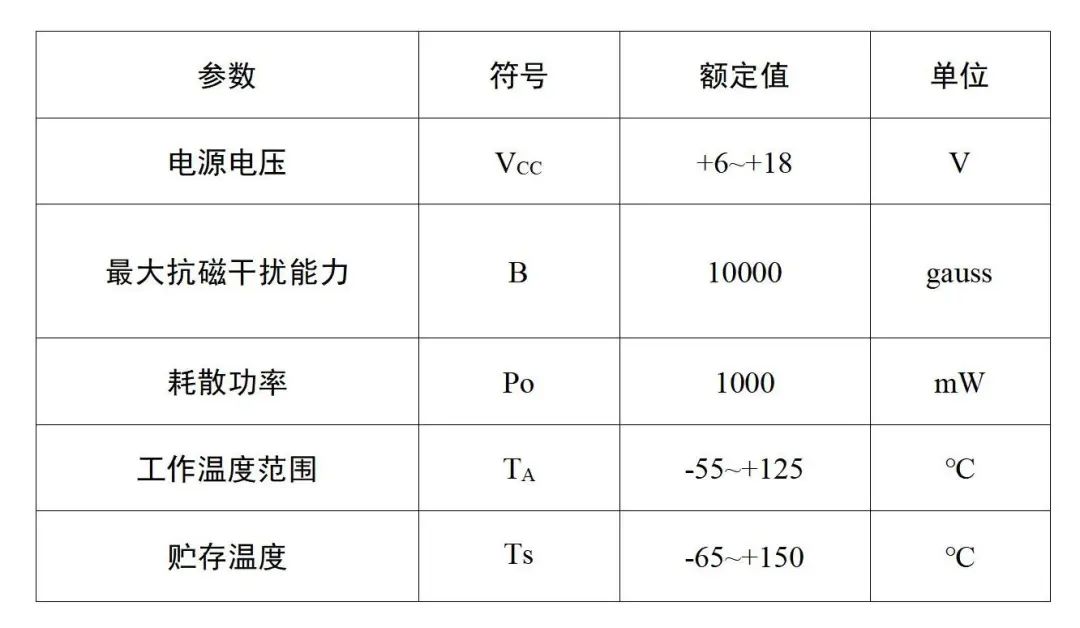
04絕對最大額定值
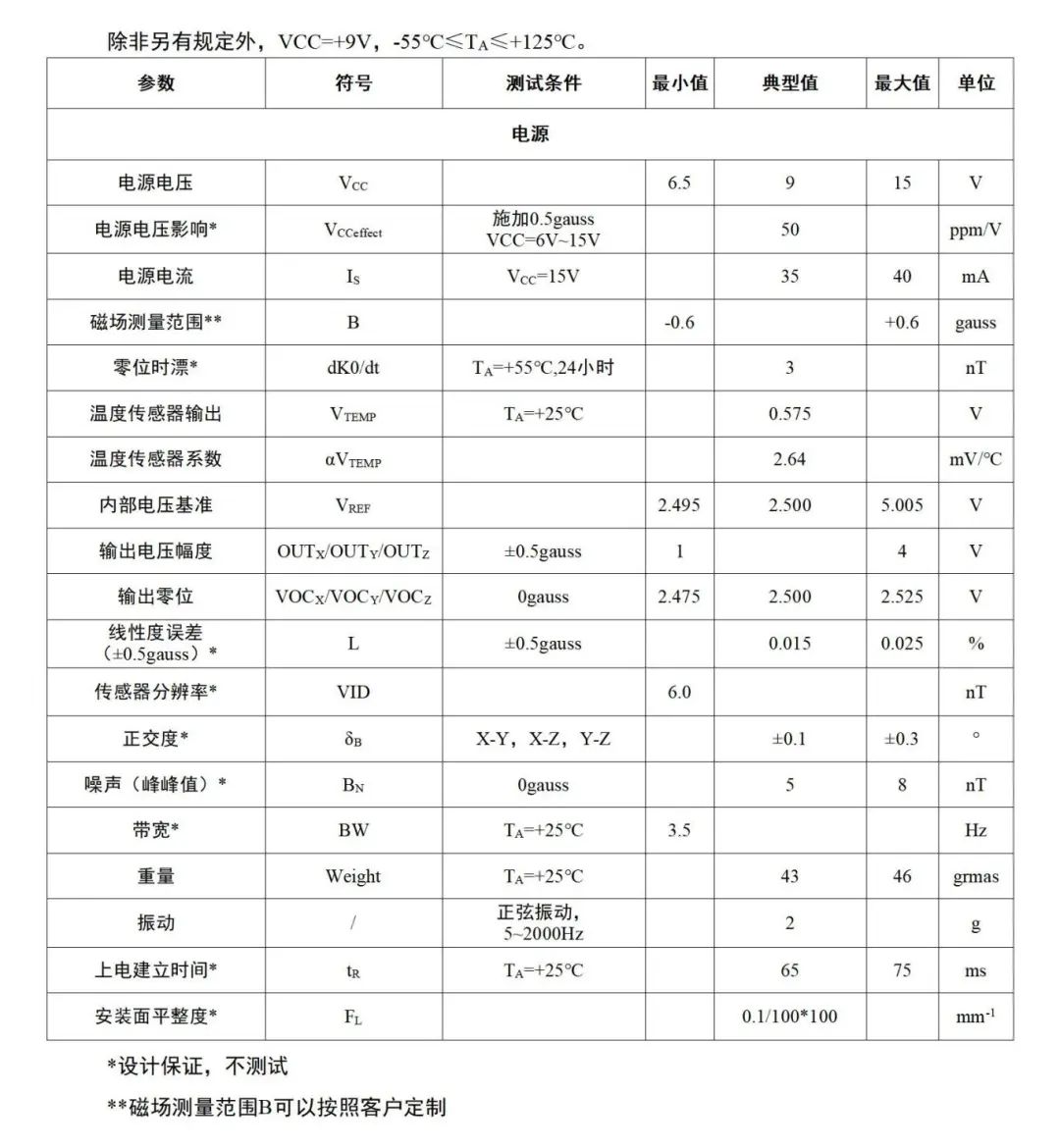
05電特性
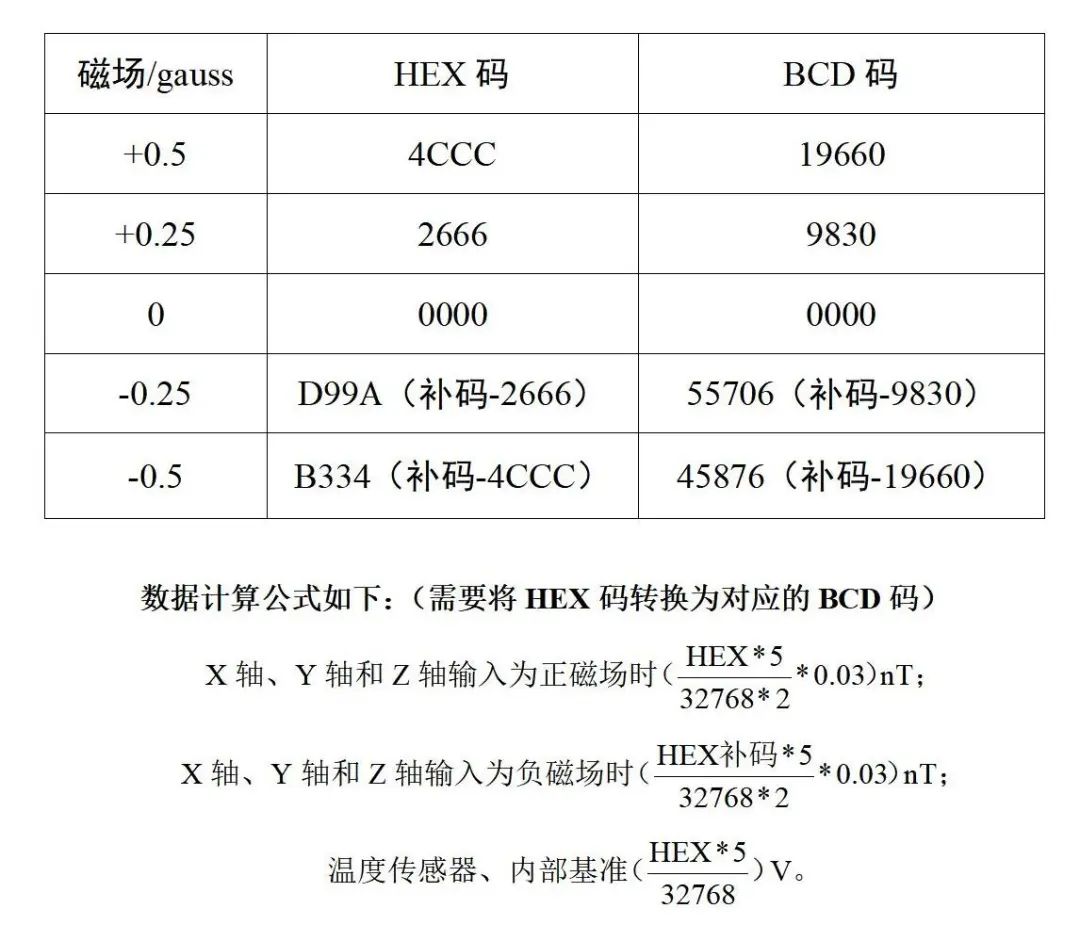
06數(shù)據(jù)格式
HJMR2300將X軸、Y軸和Z軸的輸出,以十六進制碼的數(shù)據(jù)格式,通過RS485或CAN總線,發(fā)送給上位機進行數(shù)據(jù)處理,如下表所示。
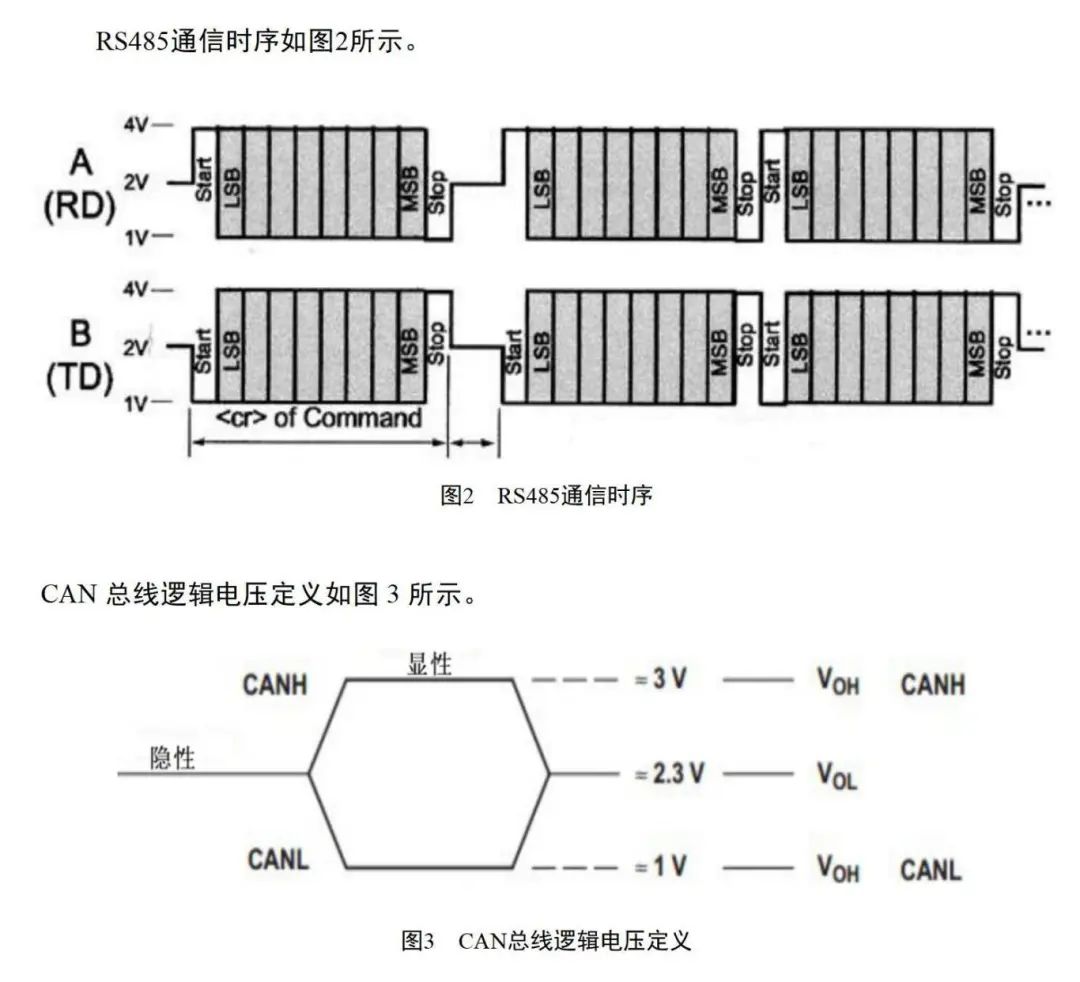
07通訊時序
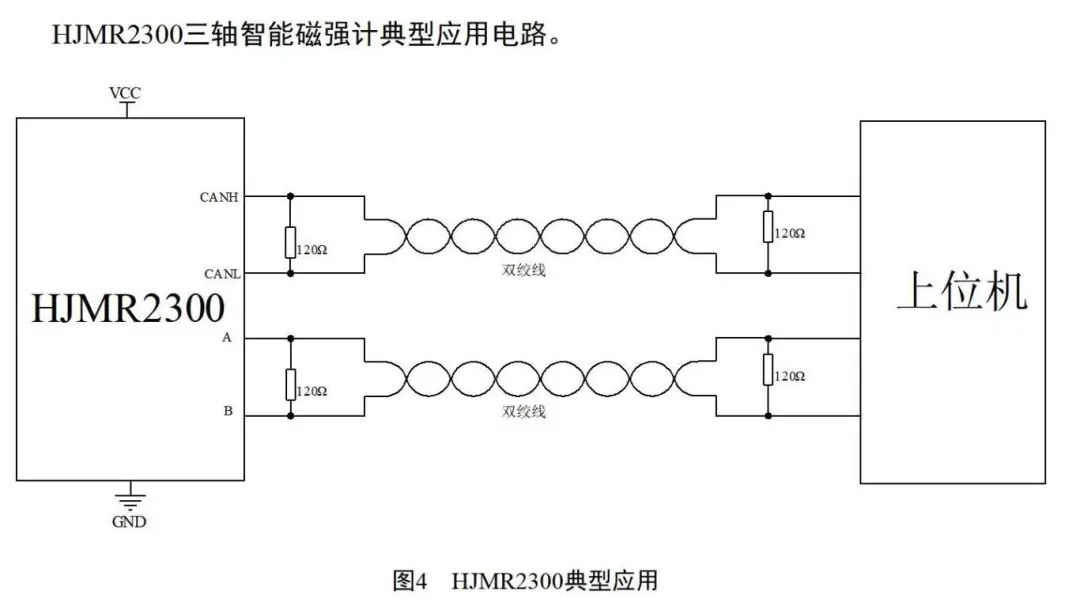
08典型應用
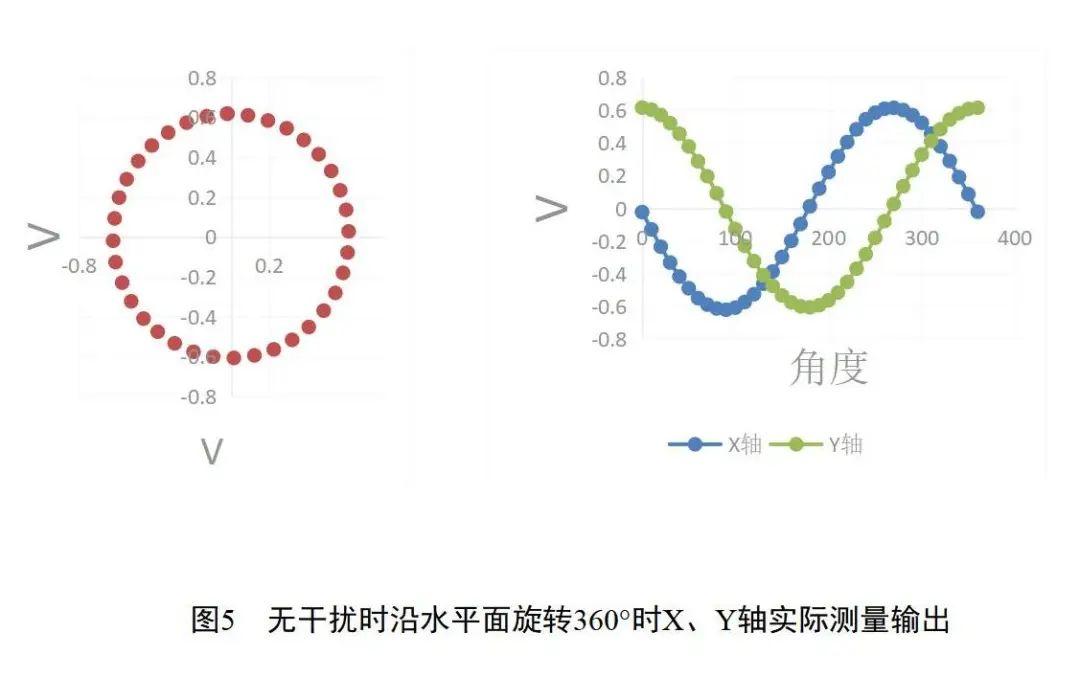
09無干擾實測
無干擾時沿水平面旋轉360°時X、Y軸實際測量輸出(西安,北緯34°9’,東經108°58’)如下圖所示:
10注意事項
1.該模塊采用無磁鋁殼體、通過激光焊完成封蓋。引出腳采用J30J-9TJP無磁航空插座,通過螺絲固定在殼體上,故該模塊的封裝不是一個氣密封裝,使用時不允許用清洗液清洗,也要預防其他酸、堿、鹽、氣氛滲入。
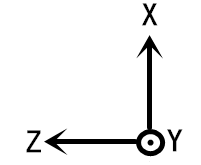
2.模塊三個正交軸的指向見下圖(頂視圖)。
3.四個通孔(Φ2)上的螺絲應選用無磁螺絲固定器件。
4.由于電流能產生磁場,故布局時應盡量避免單向大電流線靠近,以免產生噪聲/零漂。若距離拉不開,則建議供電線和回線(即GND)同時等間距布排,能雙絞最好。這樣的布排有利于電流產生的磁場相互抵消。
5.由于模塊裝配在裝備中的磁環(huán)境各不相同,這些地方很可能有鐵磁材料,鐵磁金屬(鐵、鎳、鋼、鈷)的影響會扭曲或彎曲地球磁場,最終會導致磁強計三軸輸出的零位(K0)和比例因子(K1)發(fā)生變化。這些效應可以被認為是疊加在地球磁場上的磁場,如果磁強計牢固的固定在工裝上,則可以計算鐵磁效應并將其從磁讀數(shù)中去除。
6.將模塊放置在磁屏蔽桶中,或者用坡莫合金材料包裹,加電在上位機測量X、Y、Z三軸輸出,若數(shù)字量轉換后模擬輸出為2.5±0.025V,則表明連接正常;若測不出,第一要考慮連線是否斷路。
7.為了提高AD采集精度,磁傳感器模擬輸出進行了2倍放大處理
8.考慮到客戶長線應用情況,已在模塊電源端、485端口及CAN接口設計了浪涌保護電路。
9.模塊背面為安裝基準面,是專門拋光處理的,故不能損傷。
10.預留的GX、GY和GZ三個通道用于采集三軸石英撓性加速度計信號,方便客戶進行傾角補償。
11.若用于飛機地磁導航,則必須要進行如下工作:
A、地球的地理北極與地磁北極不在一個點上,故要建模修正;
B、必須要針對經度進行建模修正,否則遠航程飛行時誤差會很大;
C、要與三軸加速度計捷聯(lián),從而完成針對飛機的俯仰角及橫滾角建模修正;
D、詳細的應用方案,請參考Honeywell公司的《Applications of Magnetoresistive Sensors in Navigation Systems》。
-
傳感器
+關注
關注
2577文章
55265瀏覽量
792848 -
濾波器
+關注
關注
162文章
8424瀏覽量
186012 -
探頭
+關注
關注
0文章
1385瀏覽量
43935 -
磁強計
+關注
關注
0文章
21瀏覽量
7611
原文標題:HJMR2300全國產高精度三軸數(shù)字磁強計
文章出處:【微信號:hangjingic,微信公眾號:航晶微電子】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
三軸陀螺儀和六軸陀螺儀的區(qū)別
L3G4200DH高性能三軸數(shù)字輸出陀螺儀
關于三軸數(shù)字高斯計/特斯拉計的介紹和應用分析

關于高分辨率三軸數(shù)字磁強計的性能分析和簡介

digilentPmodCMPS:三軸數(shù)字羅盤簡介
ADXL345傾斜度三軸數(shù)字加速度模塊的電路原理圖

EVAL-ADP2300 EVAL-ADP2300評估板


磁強計是如何定義的?磁強計有哪些分類?
航晶微高精度三軸數(shù)字磁強計HJMR2300通過權威校準

新品發(fā)布 | 多維科技推出HFM2905高頻磁強計-精準捕捉高頻磁場




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論