 魔方機器人的開發歷程:進行快速原型的原因與方法(2)
魔方機器人的開發歷程:進行快速原型的原因與方法(2)

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31079瀏覽量
222280 -
LabVIEW
+關注
關注
2017文章
3688瀏覽量
347160
發布評論請先 登錄
相關推薦
熱點推薦
創通聯達攜魔方派亮相2026高通邊緣智能開發者生態大會
及基于該平臺打造的多個創新原型方案精彩亮相。值得一提的是,基于魔方派開發的魔方Britz雙輪足機器人在高通邊緣智能創新應用大賽中脫穎而出,榮
探索RISC-V在機器人領域的潛力
利用Gazebo仿真環境(在x86主機上運行)和MUSE Pi Pro上的ROS 2節點進行了聯合仿真。
? 場景: 在PC的Gazebo中運行一個TurtleBot3機器人模型,MUSE Pi
發表于 12-03 14:40
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
處理器,支持 1.8 GHz 主頻,并集成2Tops NPU、G2D、VPU 4K高清視頻編解碼器,為復雜控制算法與視覺融合計算提供充足算力。米爾MYD-LT536開發板
在“高精度機器人
發表于 11-14 15:48
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
,已經成為機器人開發者不容忽視的核心處理器。而米爾電子的MYD-LR3576開發板,則以其豐富的接口、穩定的性能和成熟的軟硬件支持,為快速原型
發表于 10-29 16:41
小蘿卜機器人的故事
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發表于 10-23 05:24
移動機器人技術的發展歷程
本白皮書聚焦于移動機器人領域的進展與挑戰,重點探討三個核心主題:機器人運動控制、復雜環境中的感知與導航,以及在適應新任務時的模塊化與靈活性。此外,文中還重點介紹了機器人系統從簡單的固定機械臂到復雜人形
工業機器人的特點
機器人是關鍵。工業互聯網是通過端上的數據傳輸,經過大數據分析和云計算處理,再進行智能化決策的一整個過程,其中端的數據傳輸是基礎。工業互聯網的端包括機器人、傳感器等一切線下連接端口。因此發展工業
發表于 07-26 11:22
輪式移動機器人電機驅動系統的研究與開發
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間模型進行了分析和計算,研究和設計了自主移動
發表于 06-11 14:30
明遠智睿SSD2351開發板:語音機器人領域的變革力量
通過網絡連接云端服務器進行快速檢索和分析,然后利用語音合成技術將答案以自然流暢的語音反饋給用戶。同時,借助開發板的網絡連接功能,語音機器人還可以與后臺管理系統
發表于 05-28 11:36
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
。
學習建議
對于初學者,建議先通過仿真(如Gazebo)驗證算法,再遷移到真實機器人,以降低硬件調試成本。
多參與開源社區(如ROS2的GitHub項目),學習前沿技術并貢獻代碼,是快速提升實戰能力
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
地圖構建,包括算法原理介紹、安裝與配置方法、仿真環境中的SLAM以及真實機器人上的SLAM。
這一過程不僅涉及到計算機視覺和機器人學的知識,還需要對ROS 2的節點管理和數據處理有一定
發表于 04-27 11:42
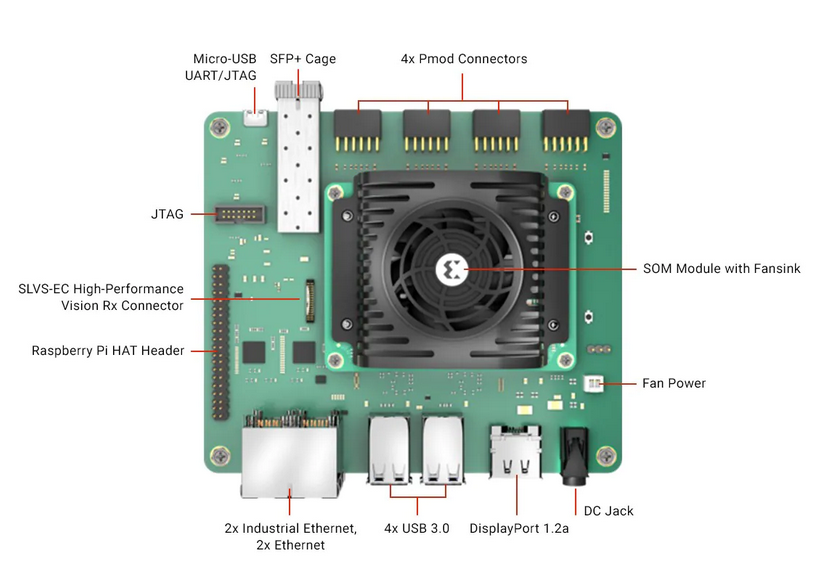
機器人開發套件 Kria KR260
AMD/XilinxKria KR260機器人入門套件是一款基于Kria K26 SOM的開發平臺,設計用于機器人和工業應用。它具有高性能接口和原生ROS2支持,便于



 工商網監
工商網監
評論