 如何理解直流無刷電機倒相的說法?
如何理解直流無刷電機倒相的說法?

直流無刷電機(BLDC)的“倒相”是電機控制領域的關鍵概念,其本質是通過電子換相替代傳統有刷電機的機械換相,實現高效、精準的轉矩控制。要深入理解這一說法,需從工作原理、控制邏輯及技術實現三個維度展開分析。
一、倒相的物理本質:電子換相的革新
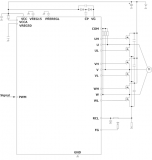
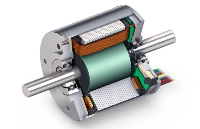
直流無刷電機的“倒相”并非字面意義上的相位反轉,而是指通過控制器對定子繞組電流方向的周期性切換。與傳統有刷電機依賴電刷與換向器的機械接觸不同,BLDC采用半導體開關(如MOSFET或IGBT)按特定順序導通或關斷,形成旋轉磁場。例如,典型的三相BLDC電機采用“六步換相法”,每60°電角度切換一次繞組通電組合,共6種狀態循環(如AB-AC-BC-BA-CA-CB)。這種電子換相消除了機械磨損,效率可達85%-90%,壽命延長至數萬小時。
霍爾傳感器或反電動勢法(BEMF)是檢測轉子位置的核心手段。以霍爾方案為例,三個傳感器間隔120°安裝,輸出信號組合直接對應轉子的6個關鍵位置。當檢測到信號跳變時,控制器立即切換功率管的導通狀態,實現磁場與永磁轉子的同步旋轉。這種動態調整過程即為“倒相”的實際體現。
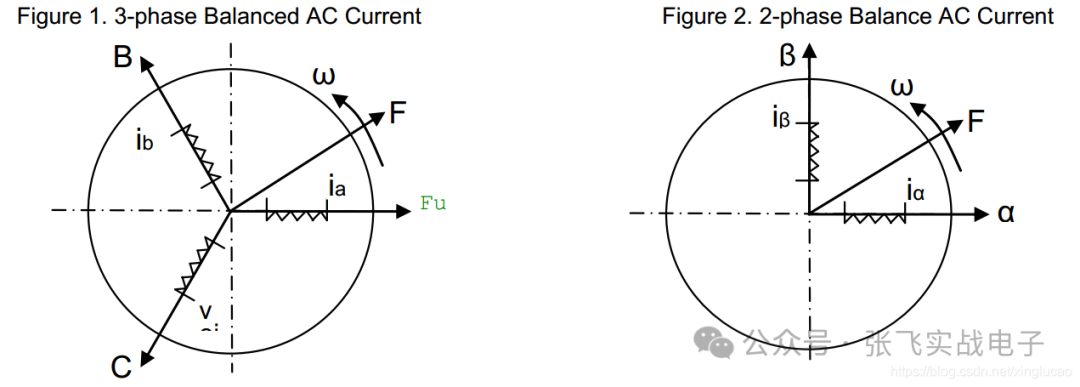
二、控制邏輯的數學表達:時空矢量與PWM調制
倒相的精確性依賴空間矢量控制(SVC)理論。將三相電流映射到α-β坐標系后,目標是通過PWM調制生成逼近圓形旋轉磁場的電壓矢量。以TI的InstaSPIN算法為例,其利用觀測器實時計算轉子角度θ,再通過Park/Clarke變換將三相電流解耦為直軸(Id)和交軸(Iq)分量。控制器通過調節Iq(轉矩分量)實現轉速控制,而倒相過程實質是電壓矢量在空間中的離散跳躍(六步)或連續旋轉(FOC)。
實驗數據表明,方波驅動的六步換相雖簡單,但轉矩脈動可達15%;而采用FOC(磁場定向控制)后,脈動可降至3%以下。這印證了倒相質量對電機性能的決定性影響。
三、技術實現的工程挑戰
1. 換相時序補償:由于繞組電感延遲,實際換相點需超前傳感器信號5°-15°電角度。某無人機電機測試顯示,未補償時效率下降12%,而采用動態補償算法后峰值功率提升8%。
2. 續流與消磁效應:關斷相繞組會產生反峰電壓,碳化硅(SiC)器件可將續流損耗降低40%。同時,突然倒相可能引發永磁體不可逆退磁,某工業伺服案例顯示,當d軸突加反向電流超過2倍額定值時,磁通密度永久下降3%。
3. 軟件容錯機制:霍爾信號丟失時,BEMF過零檢測成為備用方案。但低速下BEMF幅值微弱,此時需注入高頻信號(如脈振注入法)估算位置。某電動汽車驅動系統采用混合觀測器,在500rpm以下將位置誤差控制在±1.5°以內。
四、前沿發展:從倒相到智能預測
新一代模型預測控制(MPC)正在顛覆傳統倒相邏輯。如STM32的MotorControl SDK 5.0版本,通過有限控制集算法,在每個PWM周期評估所有開關狀態組合,選擇損耗最低的方案。實測表明,MPC使換相損耗減少22%,特別適合高速應用(>50krpm)。
此外,無位置傳感器技術取得突破。日本電產開發的“初始位置辨識”算法,通過施加短時電壓脈沖并檢測電流響應,可在0.3秒內確定轉子初始角度,解決了傳統強拉對齊的機械沖擊問題。
綜上所述,直流無刷電機的倒相是機電能量轉換的智能樞紐,其發展歷程映射了電力電子與控制理論的融合創新。理解這一概念,不僅需掌握基礎的換相時序,更要關注磁場-電流-位置的動態耦合關系。隨著寬禁帶器件與AI算法的普及,未來的“倒相”將進化為全工況自適應的能量調度系統,持續推動電機技術向高效化、集成化、智能化演進。
-
電機控制
+關注
關注
3601文章
2159瀏覽量
278659 -
直流無刷電機
+關注
關注
15文章
316瀏覽量
24885
發布評論請先 登錄
直流無刷電機驅動芯片如何挑選?ADI Trinamic選型攻略來了

三相無刷直流電機驅動芯片ACM6754產品介紹
TC-BL2840三相有感直流無刷電機驅動板在水泵的應用

無刷電機驅動器的基礎知識

合科泰MOSFET在直流無刷電機驅動板的應用

直流無刷電機的過零檢測
直流無刷電機的過零檢測
三相無刷電機驅動IC BM64071MUV-Z概述
無位置傳感器直流無刷電機軟件起動
如何理解無刷電機中的六步換向?
浮思特 | 無刷電機與有刷直流電機的區別是什么,該如何選擇?
線控轉向直流無刷電機的控制策略研究
無刷電機FOC控制筆記
有刷電機與無刷電機的區別工作總結




 工商網監
工商網監
評論