") EtherCAT轉Profinet網(wǎng)關在匯川伺服轉矩控制中的集成應用與實現(xiàn)
EtherCAT轉Profinet網(wǎng)關在匯川伺服轉矩控制中的集成應用與實現(xiàn)

EtherCAT轉Profinet網(wǎng)關在匯川伺服轉矩控制中的集成應用與實現(xiàn)
在工業(yè)自動化領域,設備間的通信協(xié)議兼容性直接決定了系統(tǒng)集成的效率與穩(wěn)定性。以EtherCAT主站轉Profinet網(wǎng)關為核心,結合匯川伺服驅動器的目標轉矩控制應用為例,其實現(xiàn)過程既需要硬件配置的精準對接,也離不開軟件參數(shù)的高效協(xié)同。以下是針對該場景的技術實現(xiàn)路徑及關鍵操作要點。

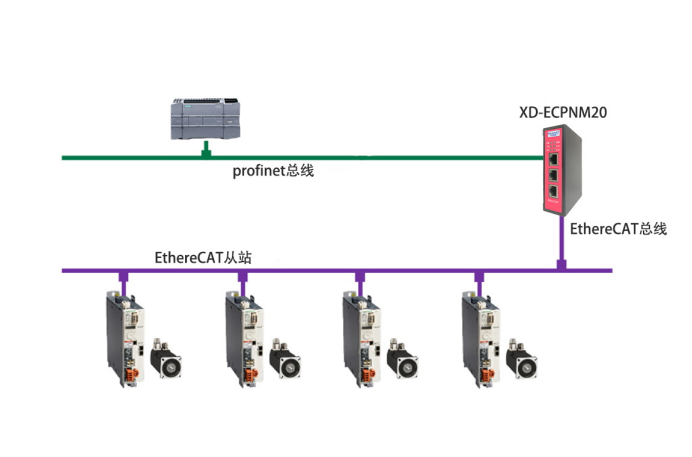
系統(tǒng)核心需選用支持EtherCAT轉Profinet協(xié)議的網(wǎng)關設備,例如興達易控XD-ECPNM20型號。這類網(wǎng)關需滿足雙向數(shù)據(jù)交互能力,輸入輸出數(shù)據(jù)長度均需適配伺服控制需求(通常不超過256字節(jié))。伺服端選用匯川MD系列驅動器時,需確認其支持EtherCAT通信協(xié)議,并通過RJ45接口與網(wǎng)關的EtherCAT端口直連。PLC側(如西門子S7-1200/1500)則通過Profinet網(wǎng)線與網(wǎng)關主站端口對接,形成“PLC—網(wǎng)關—伺服”的完整鏈路。
軟件配置與數(shù)據(jù)映射
在博圖(TIA Portal)或歐姆龍Sysmac Studio中新建項目后,需完成以下關鍵步驟:
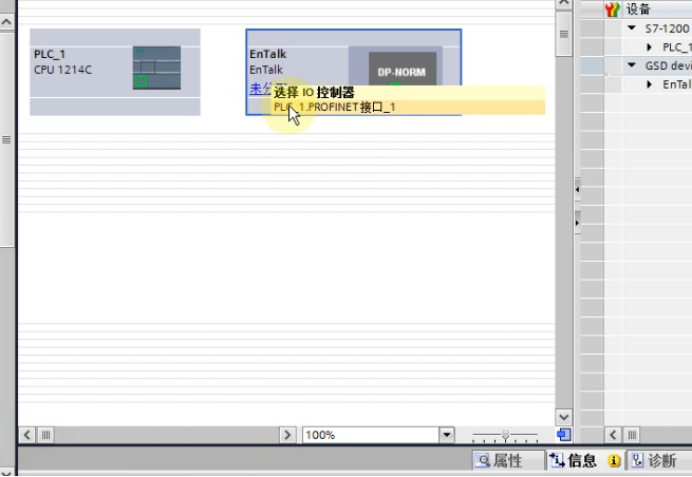
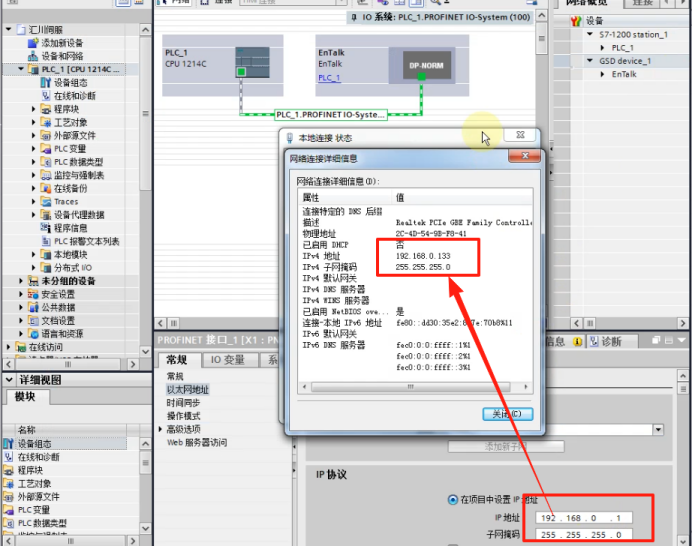
主站定義:添加網(wǎng)關作為Profinet從站設備,設置IP地址與設備名稱確保與PLC網(wǎng)絡段一致。
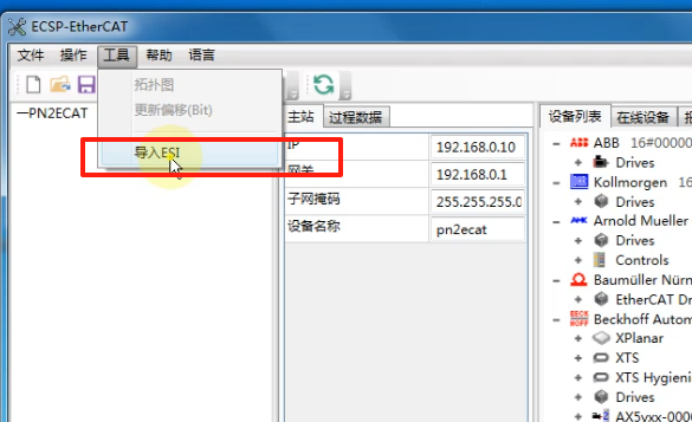
從站識別:掃描EtherCAT網(wǎng)絡,自動識別匯川伺服驅動器并分配從站地址。此時需確認伺服驅動器的XML設備描述文件(ESI)已正確導入,避免設備參數(shù)識別異常。
PDO映射:根據(jù)目標轉矩控制需求,配置過程數(shù)據(jù)對象(PDO)。
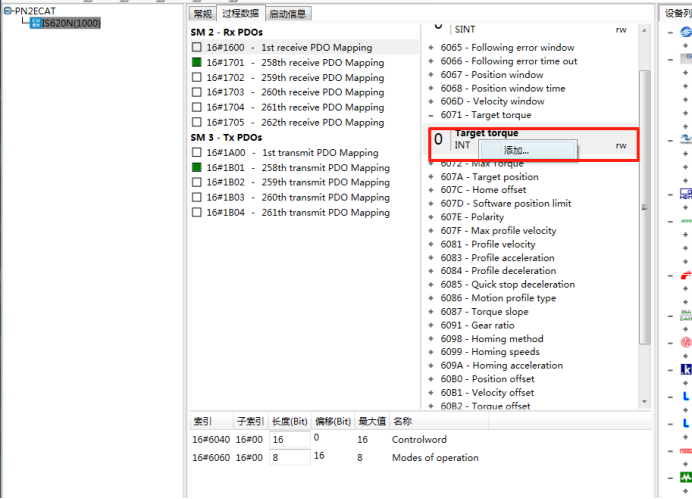
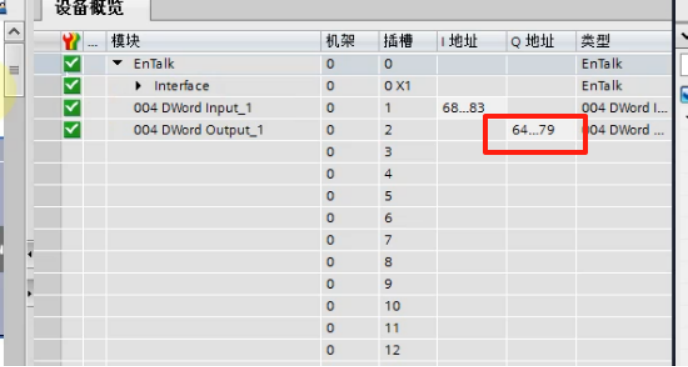
例如,將轉矩設定值(0x6071)映射到輸出區(qū)第4-7字節(jié)也就是Q地址67-70實際轉矩反饋(0x6077)映射到輸入?yún)^(qū)第4-7個字節(jié)也就是I地址71-74:
通過上述技術路徑,EtherCAT與Profinet的協(xié)議壁壘被有效打通,使得匯川伺服的轉矩控制能力深度融入工業(yè)網(wǎng)絡體系。這種集成方案不僅提升了設備響應精度,更通過標準化接口降低了多品牌設備協(xié)同的復雜度,為智能工廠的柔性化生產提供了底層支撐。
審核編輯 黃宇
-
網(wǎng)關
+關注
關注
9文章
6887瀏覽量
56493 -
Profinet
+關注
關注
9文章
2317瀏覽量
28293 -
ethercat
+關注
關注
20文章
1554瀏覽量
45813
發(fā)布評論請先 登錄
疆鴻智能PROFINET轉PROFIBUS網(wǎng)關,讓匯川伺服聽懂西門子

Profinet轉DeviceNet協(xié)議轉換網(wǎng)關在丹弗斯變頻器控制集成中的應用方案
EtherCAT轉Profinet網(wǎng)關與匯川伺服系統(tǒng)集成及輪廓模式應用解析

工業(yè)自動化中EtherCAT轉Profinet網(wǎng)關的速度控制模式配置與優(yōu)化

EtherCAT主站轉Profinet網(wǎng)關連接匯川伺服系統(tǒng)的操作模式控制技術方案
EtherCAT主站轉Profinet網(wǎng)關接匯川伺服實現(xiàn)速度控制功能
EtherCAT主站轉Profinet網(wǎng)關接匯川伺服操作模式的控制解析
基于EtherCAT轉Profinet網(wǎng)關接匯川伺服系統(tǒng)操作模式控制技術方案

禾川伺服驅動器與EtherCAT主站轉Profinet網(wǎng)關的雙向數(shù)據(jù)交換
SV660F伺服驅動器與EtherCAT主站轉Profinet網(wǎng)關通訊案例
EtherCAT主站轉Profinet網(wǎng)關如何把匯川伺服接入到西門子plc
EtherCAT轉CANopen網(wǎng)關與伺服器在匯川組態(tài)軟件上的配置步驟

EtherCAT主站轉Profinet網(wǎng)關接禾川伺服驅動器X5E快速配置案例
EtherCAT主站轉Profinet網(wǎng)關接IS620N伺服驅動器與西門子plc通訊案例
號外!PLC安川伺服,通過Profinet轉EtherCAT網(wǎng)關同步多個工作站




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論