") 中偉視界:罐籠超員監(jiān)測AI算法,智慧礦山運輸?shù)陌踩聵藴?/h1>
中偉視界:罐籠超員監(jiān)測AI算法,智慧礦山運輸?shù)陌踩聵藴?/h1>


罐籠超員風險與智能化需求
礦山罐籠作為礦工上下井的核心運輸設備,其超員運行可能引發(fā)墜罐、卡阻等重大事故。傳統(tǒng)人工計數(shù)方式存在無法實時停運罐籠、效率低、易出錯、無法實時預警等問題。隨著人工智能與邊緣計算技術的發(fā)展,基于AI視覺算法的罐籠超員監(jiān)測系統(tǒng)已成為智慧礦山建設的關鍵環(huán)節(jié)。本方案從技術原理、系統(tǒng)實現(xiàn)到應用價值,全面解析AI算法如何實現(xiàn)罐籠人員的精準計數(shù)、實時預警與智能管控,為礦山安全管理提供技術保障。
一、罐籠超員AI算法的核心原理
1.1 基礎檢測機制:動態(tài)進出統(tǒng)計
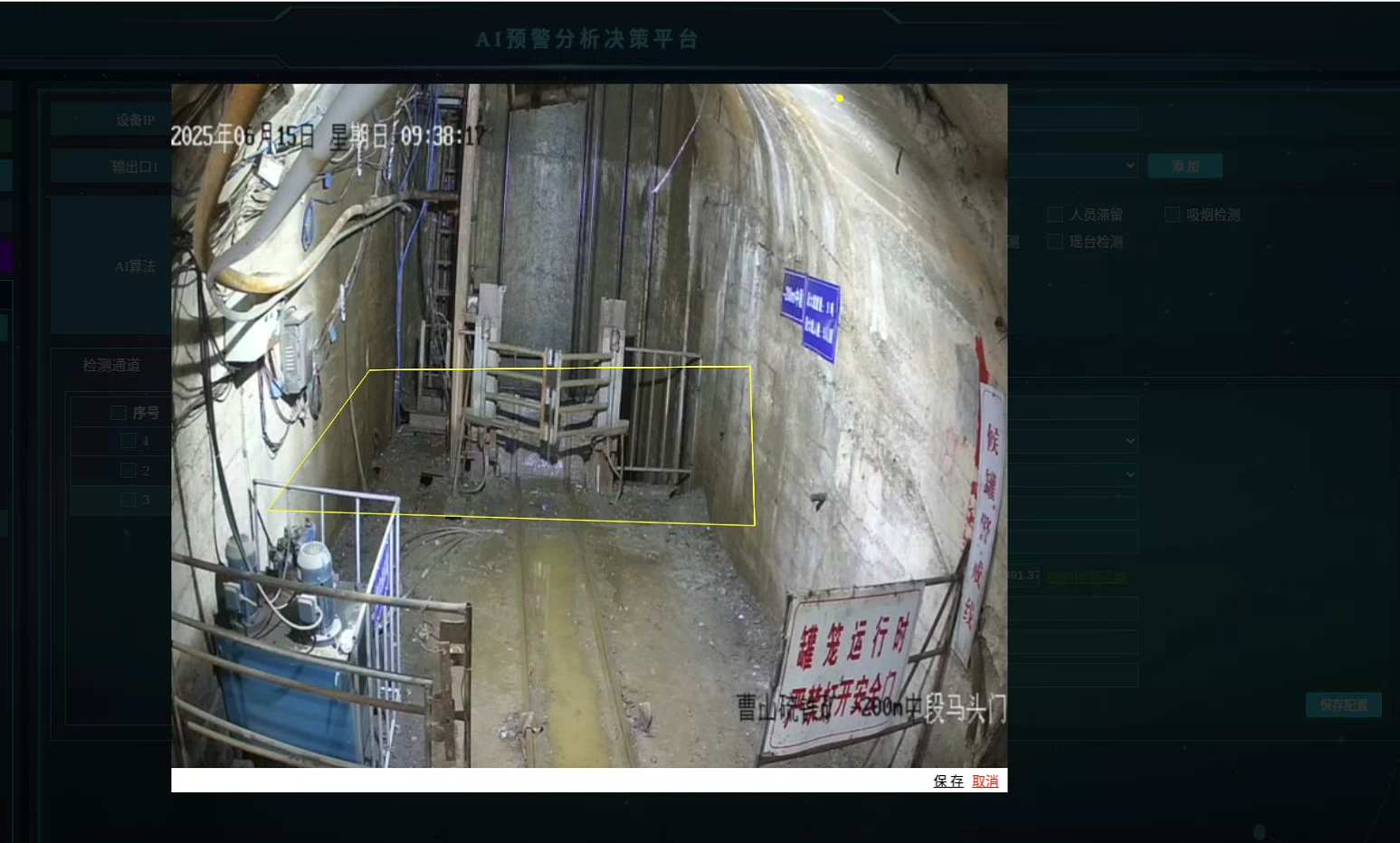
罐籠超員AI算法的核心在于實時檢測和精準統(tǒng)計進出罐籠的人員數(shù)量。系統(tǒng)通過在罐籠入口處設置虛擬檢測框,記錄人員進出信號:
入框計數(shù):人員從罐籠一端進入檢測框時,系統(tǒng)自動計數(shù)+1
出框計數(shù):人員從另一端離開時,計數(shù)-1
累積判斷:當累積人數(shù)達到預設閾值(如30人)時,立即觸發(fā)聲光報警并抓拍現(xiàn)場圖像

此過程通過目標跟蹤算法(如卡爾曼濾波)實現(xiàn)人員運動軌跡預測,為每個目標賦予唯一ID,結合預設的計數(shù)線公式(y=ax+b)計算人員跨越方向,避免重復或遺漏計數(shù)。
1.2 多維度相機協(xié)同方案:俯視視角防遮擋
針對傳統(tǒng)單相機易受罐籠附近逗留人員干擾的問題,多相機協(xié)同方案顯著提升精度:
三相機布局:
第一相機:大罐籠入口通道頂部(俯視拍攝)
第二相機:小罐籠入口通道頂部(俯視拍攝)
第三相機:罐籠對面(監(jiān)測圍欄狀態(tài))
動態(tài)觸發(fā)邏輯:
- 第三相機檢測圍欄打開后,判斷罐籠類型(大/小)
- 開啟對應通道的頂部相機進行計數(shù)
- 圍欄關閉時啟動入侵檢測,防止人員滯留危險區(qū)

該設計通過俯視視角減少遮擋,結合圍欄狀態(tài)聯(lián)動相機啟停,有效區(qū)分進出人員與逗留人員,誤檢率降低60%以上。
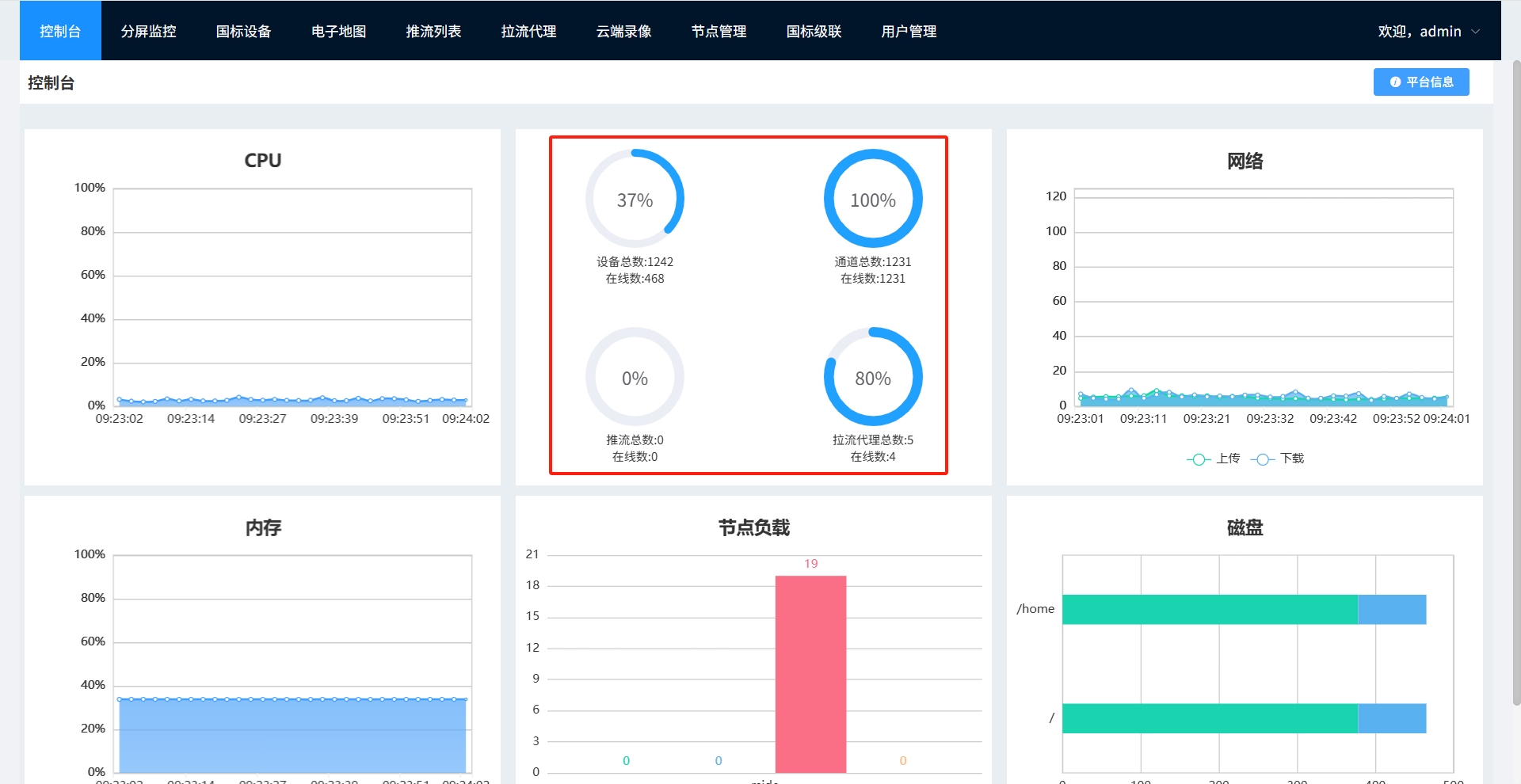
二、技術實現(xiàn)關鍵:硬件融合與算法優(yōu)化
2.1 硬件配置與環(huán)境適配
礦山井下環(huán)境復雜(高粉塵、低光照、潮濕),需針對性設計硬件系統(tǒng):
高清廣角攝像頭:1080P以上分辨率,120°廣角覆蓋罐籠全貌
嵌入式AI板卡:集成于井口礦用圖像處理儀,直接聯(lián)動閘機控制(無需外接服務器)
工業(yè)級防護:設備需達到IP67防護等級,適應礦山防塵防潮需求
2.2 算法流程與參數(shù)優(yōu)化
系統(tǒng)的準確性依賴算法流程的精細化設計:
目標跟蹤流程:
- 目標檢測:YOLOv8模型識別視頻流中人員
- 軌跡預測:卡爾曼濾波預判下一幀位置,生成臨時軌跡(tracks)
- ID匹配:匈牙利算法將檢測框與預測軌跡關聯(lián),賦予唯一ID
- 方向判定:通過計數(shù)線坐標變化判斷進出方向
關鍵參數(shù)設置:

清零機制是防誤報的核心:系統(tǒng)在設定時間(如30秒)內(nèi)無人員進入時自動清零,避免因人員延遲離開導致計數(shù)累積錯誤。
三、從精準計數(shù)到智慧安全生態(tài)
罐籠超員AI算法通過機器視覺、邊緣計算與多傳感器融合,將傳統(tǒng)依賴人力的被動監(jiān)管轉變?yōu)閷崟r響應的智能防控體系。其價值不僅在于解決超員問題,更成為智慧礦山安全生態(tài)的核心節(jié)點——通過與人員定位、設備監(jiān)控、應急系統(tǒng)的深度集成,實現(xiàn)“監(jiān)測-預警-處置-優(yōu)化”的全流程閉環(huán)管理。隨著嵌入式AI板卡的普及與算法持續(xù)優(yōu)化,罐籠安全管控將向更低成本、更高魯棒性方向演進,最終推動礦山安全管理邁入無人化、預判化的新階段。
“礦山安全的未來不在于更嚴的規(guī)章,而在于更聰明的技術。當AI能在一秒內(nèi)阻止一次超員事故,礦工的生命就多了一萬種可能。” —— 智慧礦山安全白皮書 2025

礦山版分析服務器、AI盒子、IPC包含的算法有:皮帶跑偏、皮帶異物、皮帶撕裂、皮帶劃痕、皮帶運行狀態(tài)識別(啟停狀態(tài))、運輸帶有無煤識別、煤流量檢測、運輸帶坐人檢測、行車不行人、罐籠超員、靜止超時、搖臺是否到位、入侵檢測、下料口堵料、運輸帶空載識別、井下堆料、提升井堆煤檢測、提升井殘留檢測、瓦斯傳感器識別、猴車長物件檢測、佩戴自救器檢測、風門監(jiān)測、運料車通行識別、工作面刮板機監(jiān)測、掘進面敲幫問頂監(jiān)控、護幫板支護監(jiān)測、人員巡檢、入侵檢測、區(qū)域超員預警、未戴安全帽檢測、未穿工作服識別、火焰檢測、離崗睡崗識別、倒地檢測、攝像機遮擋識別、攝像機挪動識別等等算法。
審核編輯 黃宇
-
AI算法
+關注
關注
0文章
272瀏覽量
13185
發(fā)布評論請先 登錄
中偉視界:AI視覺在港口苫布管理中的應用實踐

工業(yè)環(huán)境下的數(shù)據(jù)安全傳輸:中偉視界電子封條系統(tǒng)技術解析

中偉視界:設計揭秘,基于工業(yè)相機與邊緣AI分析盒的堵料檢測硬件方案

礦用電纜局放在線監(jiān)測:構建礦山電力安全新防線
中偉視界:告別人工巡檢,基于AI視覺的港口皮帶機異物檢測完整解決方案

RK3576助力智慧安防:8路高清采集與AI識別
霍爾傳感器在智慧小區(qū)燃氣聯(lián)網(wǎng)監(jiān)測中的應用方案與解析
中偉視界:解密GB28181流媒體平臺,多模態(tài)AI的強大支撐
中偉視界:AI智能布控球,燃氣電力施工的智能化解決方案

智能守護礦山安全:采空區(qū)立體監(jiān)測預警系統(tǒng)解決方案
探秘智慧路燈網(wǎng)絡安全監(jiān)測,解鎖城市安全新密碼
智慧路燈桿網(wǎng)絡安全監(jiān)測:守護智慧城市的數(shù)字生命線
中軟國際推出智慧礦山綜合管控平臺解決方案
華為助力打造智慧礦山安全新標桿
礦山安全監(jiān)測智能化升級:峟思傳感器技術如何破解行業(yè)痛點




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論