 AGV搬運機器人常用傳感器應用簡介及其原理
AGV搬運機器人常用傳感器應用簡介及其原理

雷達
#揭秘雷達如何實時鎖定高速目標!
激光雷達是一種通過發射激光束探測目標信息的傳感器系統。其核心原理為:向目標發射激光并接收反射信號,通過計算激光往返時間確定目標距離;同時設備高速旋轉進行360度掃描,收集密集的點云數據(物體表面坐標集合),實時構建環境的二維/三維數字模型。該系統可精確測量目標的位置、速度、形狀等多種參數,廣泛應用于自動駕駛、測繪等領域。
激光雷達內部技術與特點如下表所示:
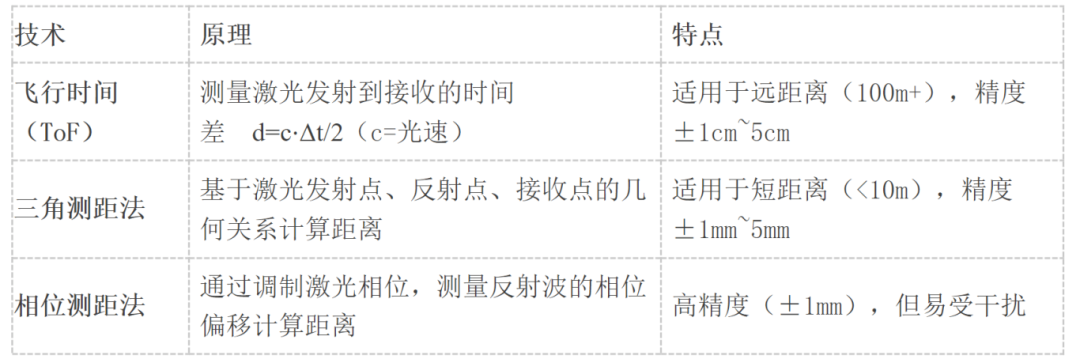
(1)點云數據是激光雷達在掃描范圍內探測到的所有物體表面點的集合。每個點包含兩類核心信息:
①.反射率特性
●數值范圍:0-255
●漫反射物體:0-150(對應反射率0%-100%)
●全反射物體:151-255(如金屬、玻璃)
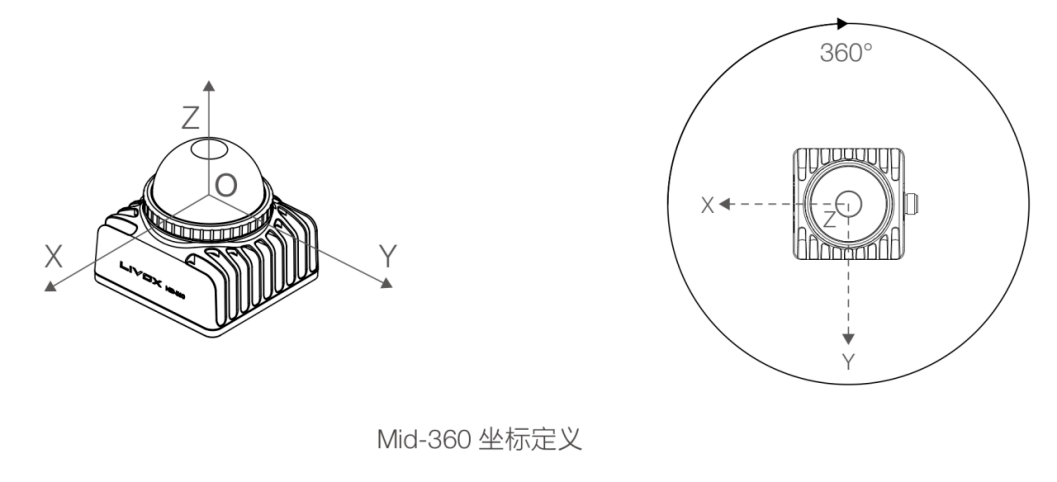
●注意:當物體距離Mid-360雷達<2米時,反射率誤差較大,僅能判斷全反射/漫反射類型
②.空間坐標
●坐標系類型:直角坐標(x,y,z)或球坐標(r,θ,φ)
●探測有效時:輸出真實坐標值
●探測無效時(無物體/超量程>100m):
直角坐標:(0,0,0)
球坐標:(0,θ,φ)(保留當前掃描角度信息)
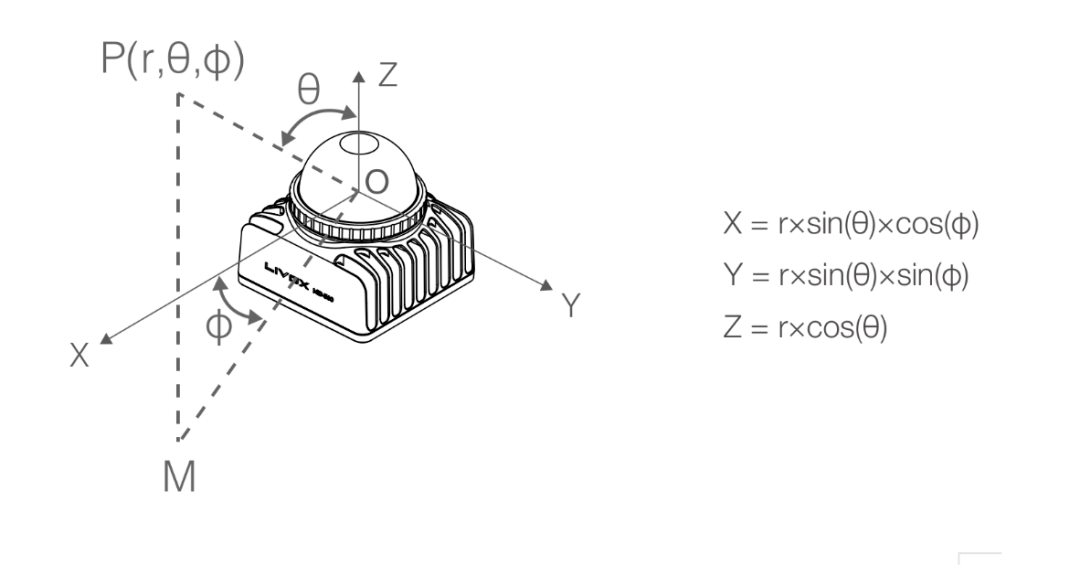 Livox mid-360雷達直角坐標和球坐標的對應關系
Livox mid-360雷達直角坐標和球坐標的對應關系
(2)激光雷達按線數分類可分為單線激光雷達和多線激光雷達,單線激光雷達是指激光源發出的線束是單線的雷達,獲取的是2D平面掃描圖;多線激光雷達是指同時發射及接收多束激光的激光旋轉測距雷達,市場上目前有4線、8線、16 線、32 線、 64 線和128線之分,多線激光雷達可以識別物體的高度信息并獲取周圍環境的3D掃描圖。如圖所示為二維和三維點云的可視化顯示。
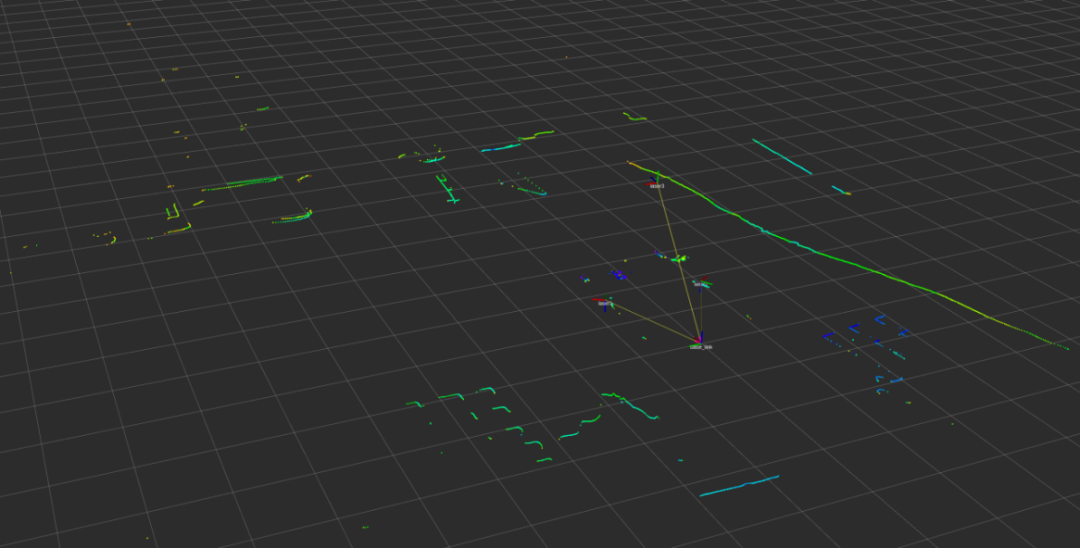 二維點云的可視化顯示
二維點云的可視化顯示 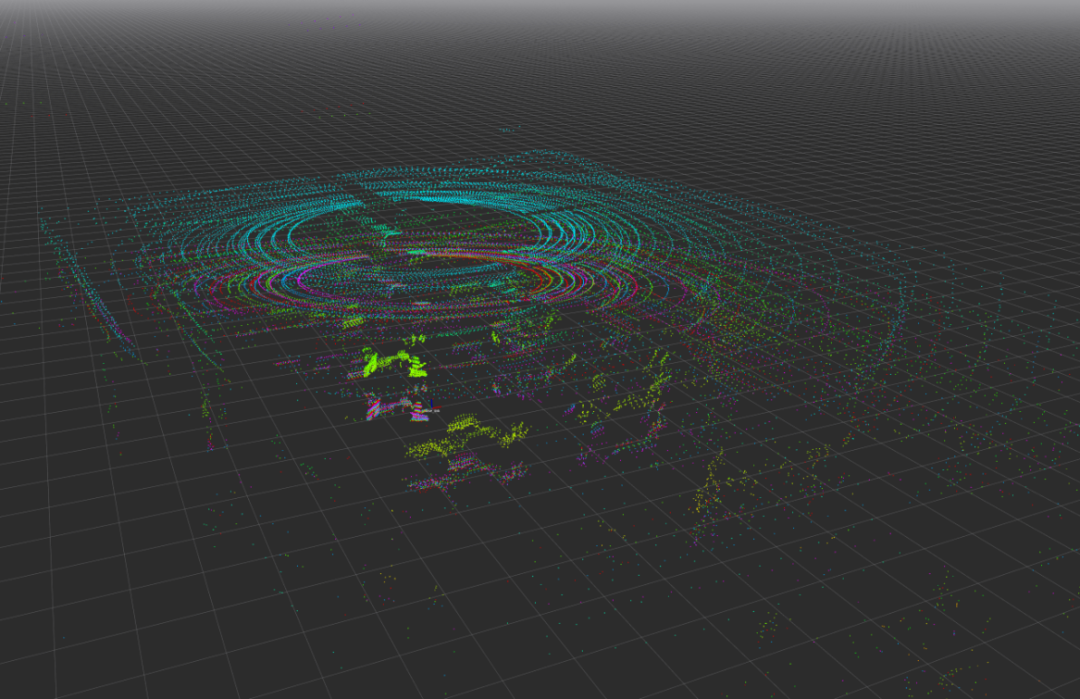 三維點云的可視化顯示
三維點云的可視化顯示
#導航為什么總能猜對你想走哪條路?
激光導航是目前AGV系統中普遍采用的導航方式,根據它的導航原理,AGV小車在導航區中可自由行走并精確定位;在導航范圍內,小車的行走路徑可根據實際要求隨時改動,可充分發揮AGV的柔性,提高生產效率。有許多系統需要在現有的場地條件下進行,這時激光導航AGV系統將會顯得尤為合適。
(1)激光導航的核心原理可概括為兩大原理:
①.建地圖(首次學習環境)
●AGV首次啟動時,像“用激光筆掃描房間”一樣,通過激光雷達全方位掃描周圍環境。
●利用 SLAM技術(自主定位+繪圖),記錄墻壁、設備等固定物體的位置,生成一張環境數字地圖。
②.實時定位(導航時找位置)
●AGV移動時,激光雷達持續掃描,實時獲取周圍環境的“快照”點云數據。
●將實時數據與已存儲的地圖對比(類似“玩找不同游戲”),通過算法計算出AGV當前的精確位置和朝向。
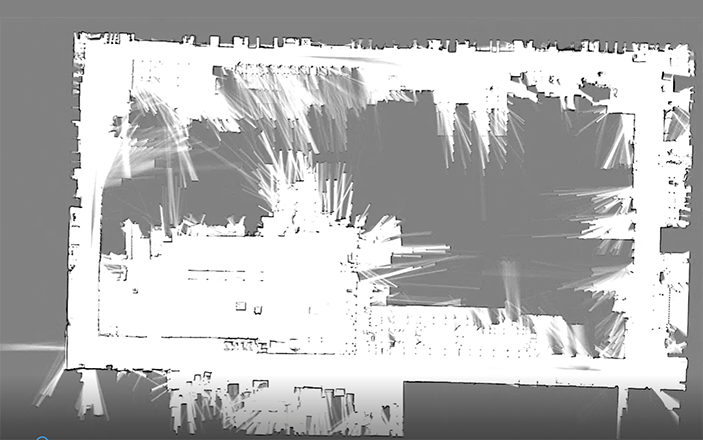 二維柵格地圖實例
二維柵格地圖實例 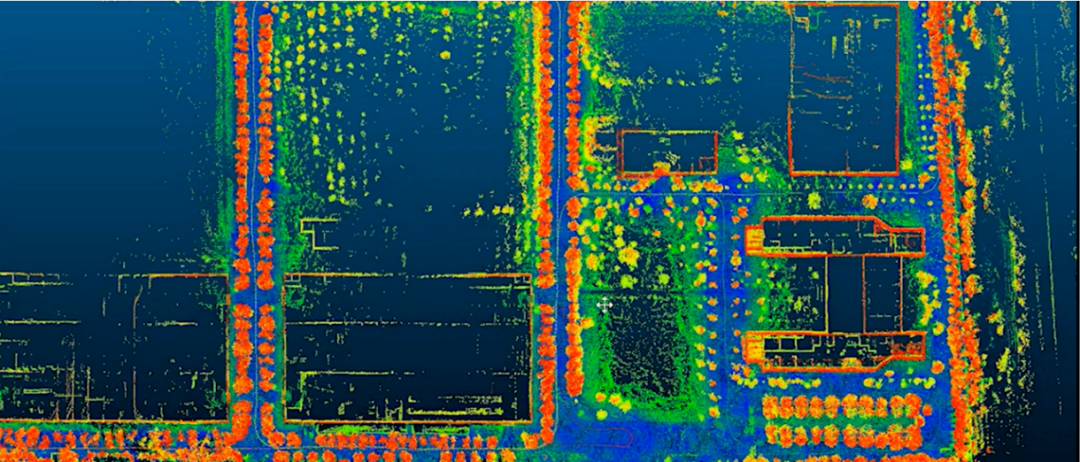 三維點云地圖實例
三維點云地圖實例
(2)激光導航特點:
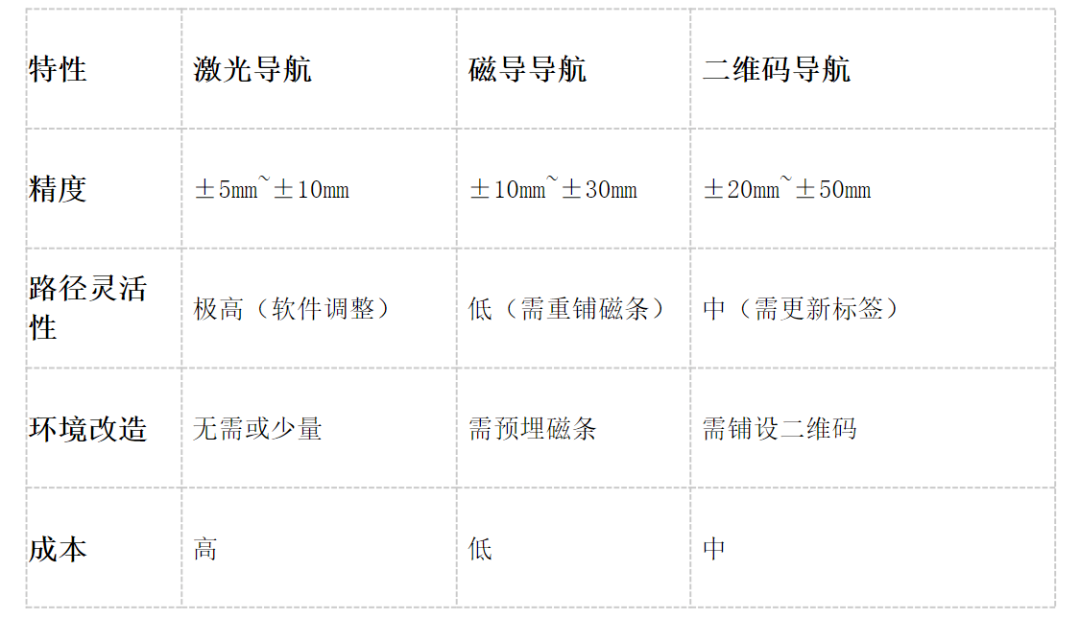
高精度定位與導航,適合對精度要求嚴格的場景,如堆疊取放貨;環境適應性強,復雜場景有一定兼容性,可應對光照變化、輕微地面不平整等干擾,但需避免強光直射激光雷達,可能影響測距精度;無固定路徑限制,不同于磁導或二維碼導航,激光導航無需預埋磁條或鋪設標簽,通過軟件即可自由修改路徑;高智能化與擴展性,多車協同,通過中央調度系統共享地圖和實時位置信息,實現多AGV協同作業,如交叉路徑避讓、任務分配。
對比其他導航方式如表所示:
#遇障礙秒躲的AI條件反射是如何煉成的?
(1)激光避障原理
通過激光雷達實時掃描生成環境點云數據,先用智能算法將相鄰點云聚集成障礙物團塊,區分靜態物體(位置不變)和動態物體(位置變化,可預測軌跡);同時結合多個雷達的同步掃描數據,統一以車身為中心分析周圍環境,車體外的所有點云均標記為障礙物,實時規劃安全路徑避開危險。
(2)避障類型
單線激光雷達(如SICK TIM系列):低成本,用于平面2D避障。
多線激光雷達(如Livox Mid360, Velodyne VLP-16):3D避障,檢測空間高度信息,防止低矮或懸空物體。
(3)避障雷達安裝位置
主要為車頭/車尾主避障、車身兩側側向防護、頂部全局監控,如圖所示。車頭車尾一般安裝在車體的四個角上,且雷達正前方向外傾斜。車身兩側側向防護一般以四個角上的雷達掃描范圍即可覆蓋。頂部全局監控一般將導航雷達同時用作避障。
以雷達正前方為0度,覆蓋車身邊緣的范圍為正負135度,但由于車體干涉,需要將靠近車體的部分濾除,因此FOV范圍一般設定為正負120度。叉間一般只檢測單線無角度避障。
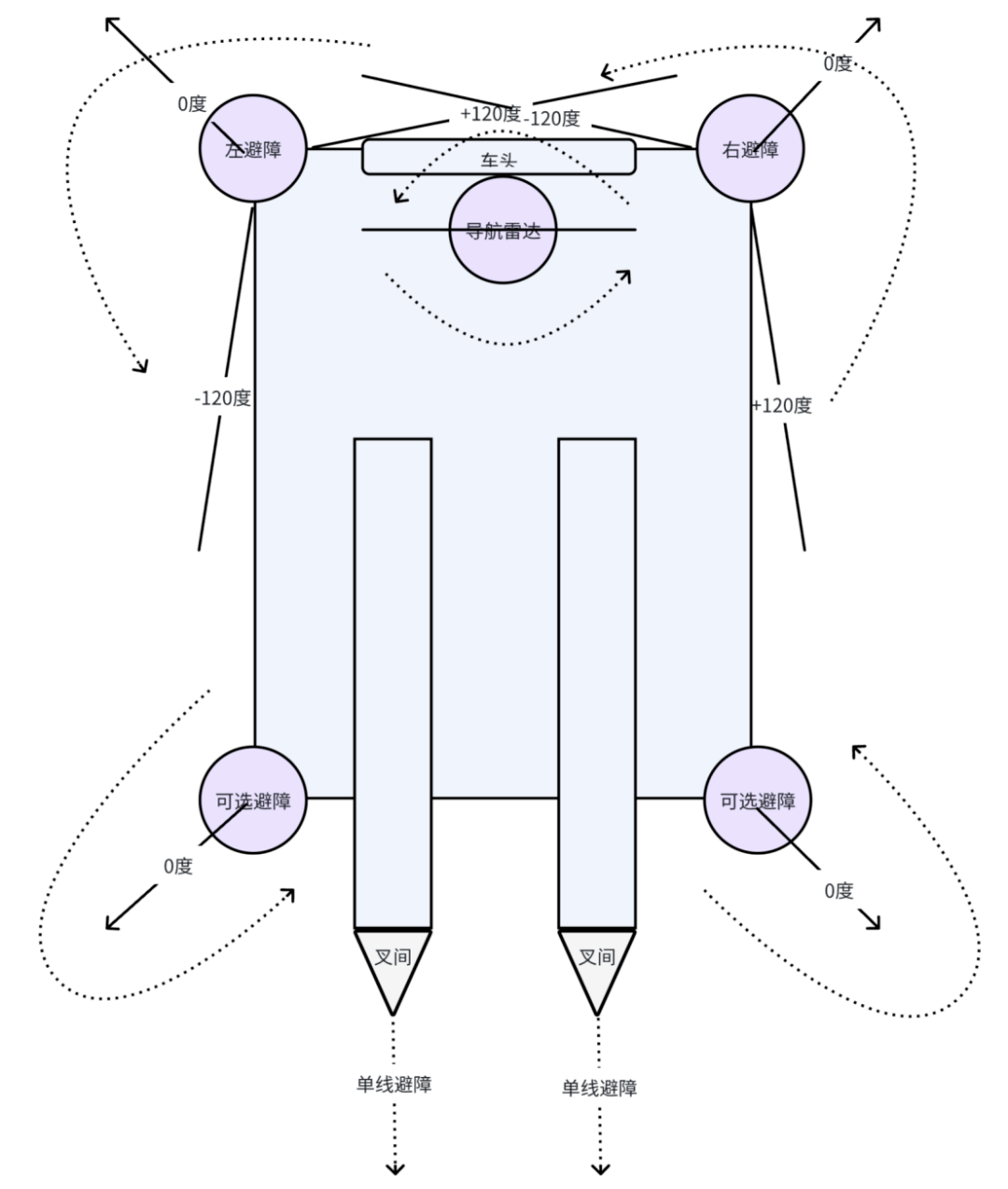 2d雷達避障一般安裝位置與覆蓋范圍
2d雷達避障一般安裝位置與覆蓋范圍
(4)360度空間環繞避障:
需通過2d與3d雷達安裝位置確保掃描范圍整體覆蓋車身周圍一圈。
3d雷達以mid360為例,需已知其坐標定義和最大覆蓋掃描范圍,如圖所示。
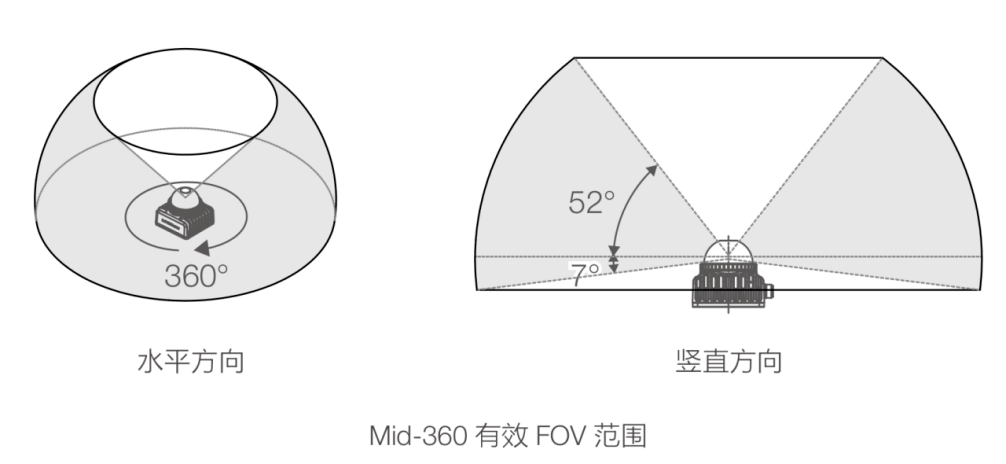
默認方案為:車頭前導航雷達下側豎裝或向上斜裝一個3d雷達,車身兩側豎裝或向上斜裝各一個3d雷達,車身后側貨叉下面豎裝或向上斜裝一個3d雷達,叉間采用光電IO避障。
(5)技術優勢與局限性
優勢:高精度:毫米級測距精度,遠高于超聲波或紅外。抗干擾:不受環境光、灰塵、電磁場影響(相比視覺傳感器)。快速響應:掃描頻率通常10Hz~50Hz,適合高速AGV(≥1.5m/s)。
#電子版“第六感”:如何為搬運機器人看風聽雨?
(1)激光感知原理概述:
通過3D雷達獲取點云數據后,先過濾灰塵、玻璃反光等干擾信息,再利用智能算法提取貨架邊緣、墻角、托盤叉孔等關鍵結構特征,最終將目標物體精確映射到坐標系中,輸出位置姿態信息并構建帶語義的局部環境地圖,實現“看清物體+理解場景”的智能感知。
(2)托盤識別與定位
 海豚之星機器人托盤識別與定位
海豚之星機器人托盤識別與定位
(3)叉取對齊

(4)自動堆疊
 海豚之星機器人自動堆疊
海豚之星機器人自動堆疊
(5)技術優勢與局限性
優勢:高精度:激光測距精度可達±1mm,滿足工業級托盤操作需求。抗環境光干擾:相比視覺方案,激光不受光照變化影響。實時性強:掃描頻率10Hz~50Hz,適合高速物流場景。
局限性:成本高:激光雷達價格顯著高于超聲波,尤其多線雷達。特殊材質影響:黑色吸光物體或鏡面反射物體可能降低檢測可靠性。計算復雜度:實時點云處理需較高算力(需嵌入式GPU或專用處理器)。
相機
#ToF怎樣用光波實現毫米級「隔空測量」?
Time-of-Flight(ToF)是三大主流3D成像技術之一(另兩種為結構光與雙目立體視覺)。其原理是通過發射近紅外光并計算光線往返時間,直接獲取物體的距離信息(深度)。相較于其他技術,ToF具有計算簡單、抗干擾強、遠距離測量的優勢,因此被廣泛應用于手機后置攝像頭(如華為/OPPO/蘋果)、工業自動化、AGV導航和機器人抓取等領域。
(1)dtof
dToF(直接飛行時間測距)由三大核心組件構成:
①VCSEL:發射納秒級激光脈沖;
②SPAD(單光子雪崩二極管):可檢測單個光子級的反射光信號;
③TDC(時間數字轉換器):精確記錄光脈沖往返時間。
其工作原理為:單幀內發射接收N次脈沖,通過TDC記錄每次飛行時間并生成直方圖,取最高頻時間t計算深度(d=ct/2)。此技術通過統計優化顯著提升抗干擾能力,實現高精度深度測量。
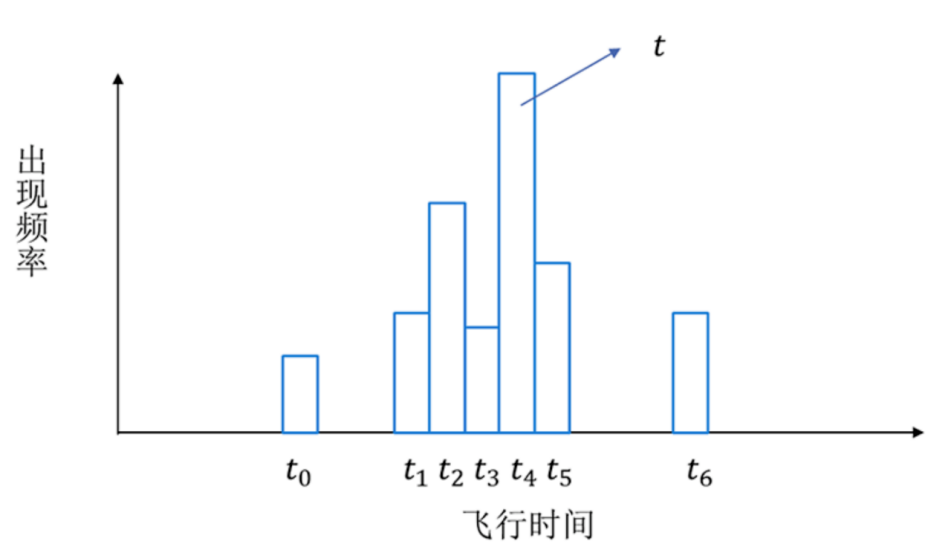 單像素記錄的光飛行時間直方示意圖
單像素記錄的光飛行時間直方示意圖
dToF的原理看起來雖然很簡單,但是實際能達到較高的精度很困難。除了對時鐘同步有非常高的精度要求以外,還對脈沖信號的精度有很高的要求。普通的光電二極管難以滿足這樣的需求。而dToF中的核心組件SPAD由于制作工藝復雜,能勝任生產任務的廠家并不多,并且集成困難。所以目前研究dToF的廠家并不多,更多的是在研究和推動iToF。
(2)itof
iToF的概念和dToF相對應,全稱是indirect Time-of-Flight,直譯就是間接光飛行時間。所謂間接,就是指iToF是通過測量相位偏移來間接測量光的飛行時間,而不是直接測量光飛行時間。iToF向場景中發射調制后的紅外光信號,再由傳感器接收場景中待測物體反射回來的光信號,根據曝光(積分)時間內的累計電荷計算發射信號和接收信號之間的相位差,從而獲取目標物體的深度。如圖所示。
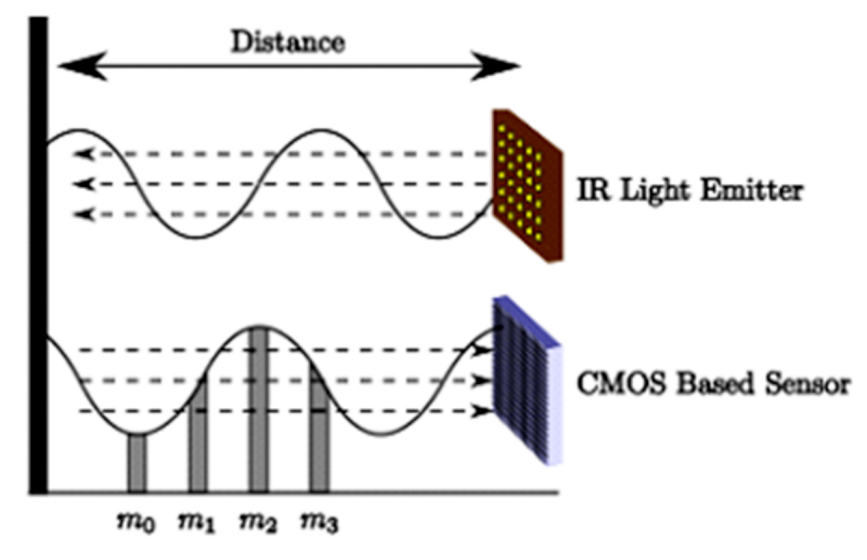 iToF成像原理示意圖
iToF成像原理示意圖
iToF模組的核心組件包含VCSEL和圖像傳感器。VCSEL發射特定頻率的調制紅外光。圖像傳感器在曝光(積分)時間內接收反射光并進行光電轉換。曝光(積分)結束后將數據讀出,經過一個模擬數字轉換器再傳給計算單元,最終由計算單元計算每個像素的相位偏移。iToF計算深度的方式通常是采用4-sampling-bucket算法,利用4個相位延遲為0°,90°,180°和270°的采樣信號計算深度。如圖所示。
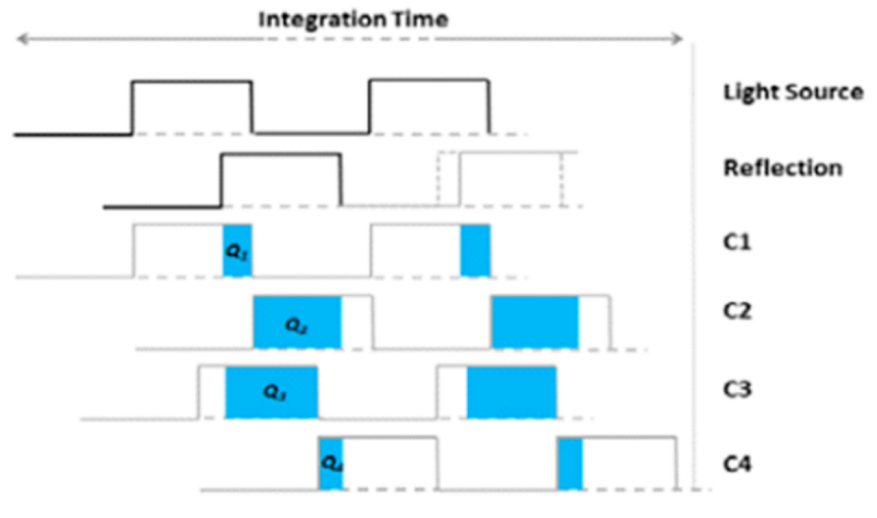 連續波調制方式測相位偏移原理示意圖
連續波調制方式測相位偏移原理示意圖
(3)深度圖生成
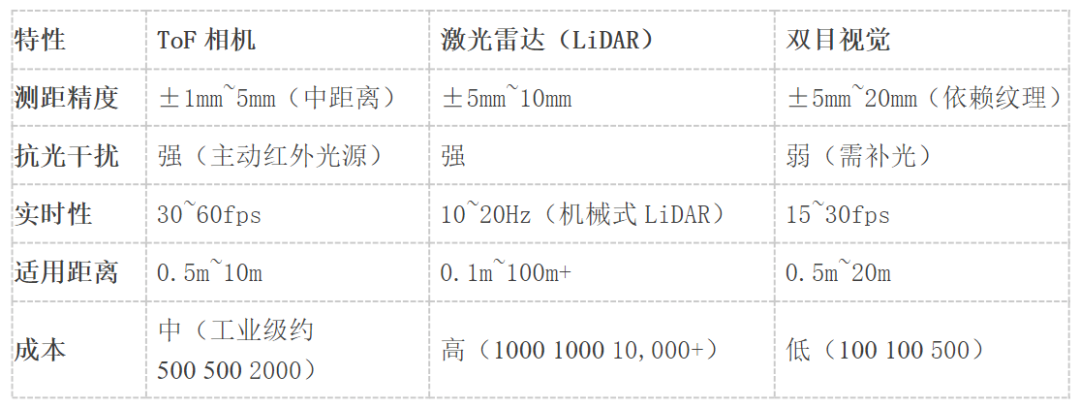
雙目立體視覺通過左右攝像頭同步拍攝物體,利用視差(圖像中物體的位置差)計算深度,類似人眼的距離感知;而ToF相機則直接記錄每個像素的飛行時間距離值,生成高分辨率深度圖(如640×480),結合RGB攝像頭可構建彩色3D點云,兩者均為3D環境建模的核心技術。
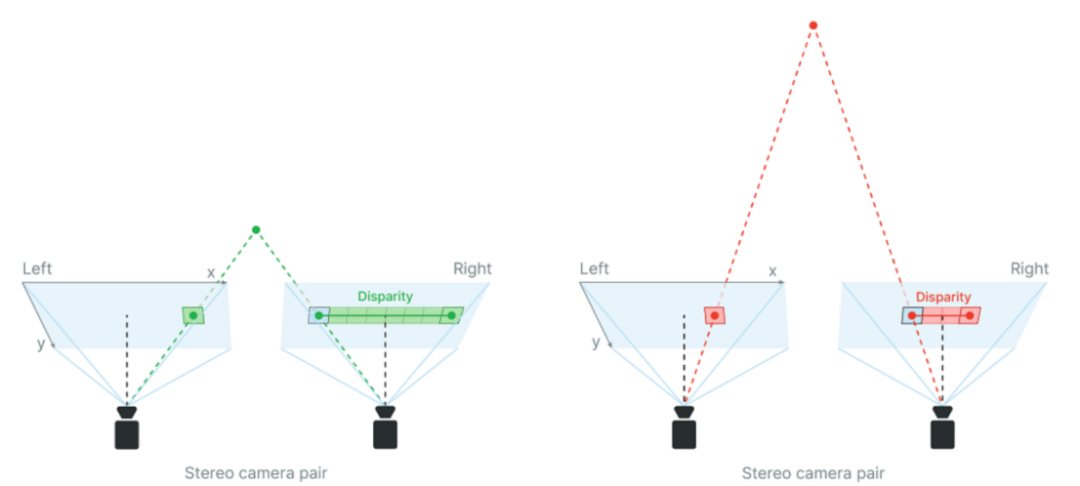
視差原理示意圖深度圖計算公式:

無論是更大的基線距離還是更大的焦距,都會在相同視差下產生更深的深度,這意味著深度精度會更好。焦距是相機透鏡和圖像傳感器之間的距離。焦距越大,FOV越窄。因此,為了獲得遠距離深度感知,您可以增加基線距離和/或減小FOV。
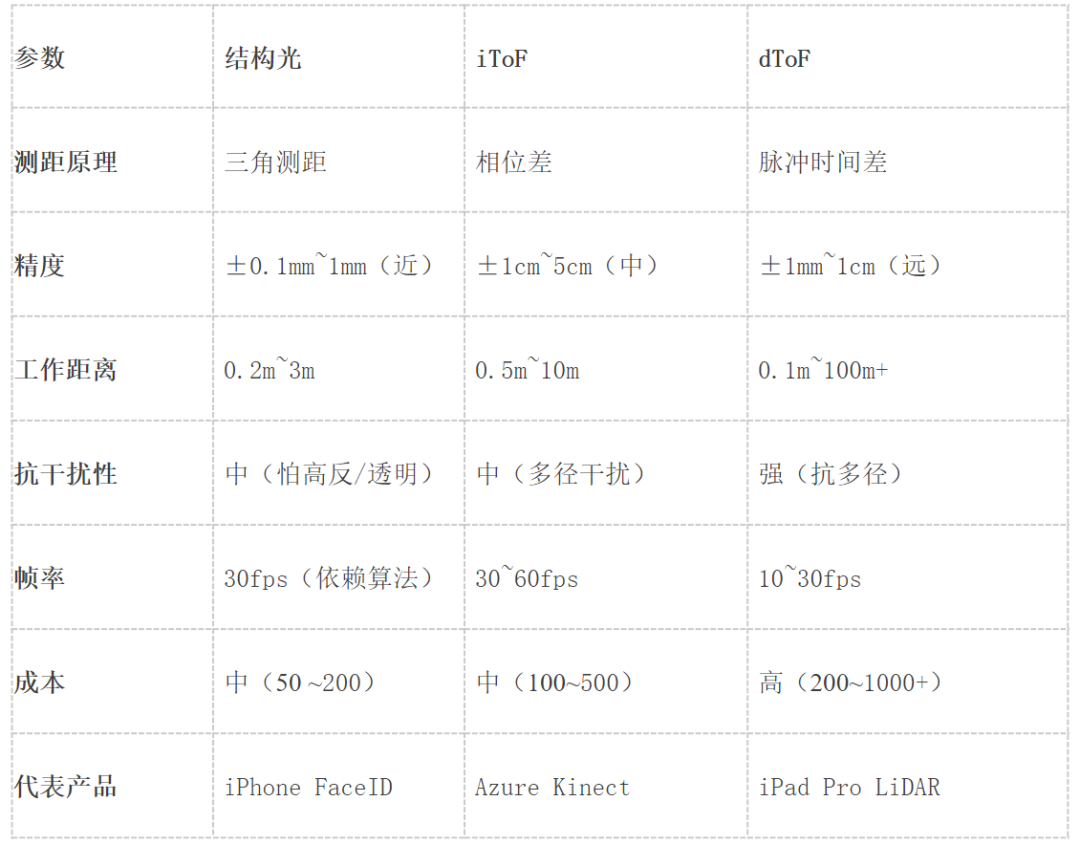
深度相機成像方式對比如表所示:
#Tof相機在AGV領域的應用:
(1)避障與安全防護
動態避障:實時檢測5m內的障礙物(如人員、叉車、貨架),觸發減速或急停。多級安全區域(如:1m外預警,0.3m內急停)。低矮障礙檢測:檢測地面上的托盤、貨箱等,防止AGV碰撞或碾壓。
(2)托盤識別與叉取
托盤定位:通過深度圖識別托盤叉孔位置,精度可達±3mm。適應不同托盤類型(木制、塑料、金屬)。自動叉取:結合AGV運動控制,調整叉臂位姿,確保精準插入。
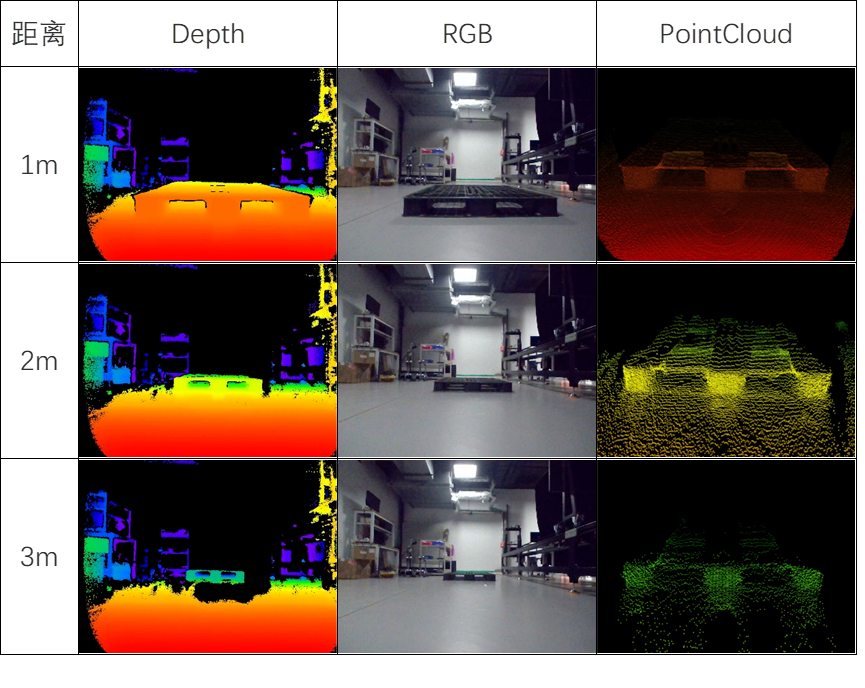
黑色托盤的tof相機檢測結果如下圖所示,depth為深度圖,RGB為彩色圖,PointCloud為點云數據,將原始點云通過感知算法處理,最終輸出托盤相對于車體中心的二維位姿。
堆疊檢測:測量貨物高度,確保多層堆疊穩定性。
體積測量:計算包裹尺寸(長×寬×高),用于物流分揀。
#ToF相機的技術優勢
其他傳感器
#超聲傳感器
1.原理:發射40kHz-200kHz超聲波脈沖,接收反射信號計算距離。
2.應用:
●AGV避障/到位檢測:典型波束角15°~30°(遠距覆蓋廣,精度低);
●透明物體檢測(玻璃/亞克力);
●多設備需防串擾,盲區(5-20cm)需紅外/激光補足。
3.優點:
●抗光/粉塵/霧氣干擾,適應工業復雜環境;
●成本極低(單價10~100元),壽命長(>10萬次);
●非接觸無磨損。
4.缺點:
●精度低(±1~5cm,溫濕度影響),需多傳感器融合;
●動態響應慢(50~100ms),不適用高速場景(>1.5m/s);
●多徑反射干擾,依賴算法(如RANSAC)濾噪。
#慣性測量單元(IMU)
1.原理:
●由陀螺儀(測量角速度)和加速度計(測量線性加速度)構成,部分集成磁力計輔助航向校準;
●通過姿態解算與濾波算法(如卡爾曼濾波)輸出歐拉角。
2.應用:
●AGV導航:融合編碼器數據補償航向漂移,提升定位精度;
●動態姿態控制:實時監測貨叉俯仰/翻滾角,調整貨物姿態;
●無基礎設施定位:隧道、室內等無GPS場景的自主導航。
3.優點:
●完全自主,不依賴外部信號(GPS/反光板);
●高頻更新(可達1kHz),實時性強;
●抗光照/粉塵/電磁干擾(磁力計除外)。
4.缺點:
●累積誤差:陀螺儀漂移需多傳感器(視覺/里程計)融合校正;
●校準依賴:開機需靜止校準零偏,定期維護;
●初始對準:啟動時需水平靜止或已知姿態初始化。
#拉線編碼器
1.原理:通過機械傳動與編碼器結合實現位移測量:拉線(鋼絲/纖維)隨物體移動伸縮,帶動內部編碼器旋轉,將位移轉換為電信號(公式:位移=編碼器分辨率×脈沖數×輪周長)
2.應用:包括AGV貨叉精密控制(±1mm精度)、斜坡車身調平及集裝箱吊具校準;
3.優勢:為超高精度(±0.01mm)、抗干擾(耐粉塵/電磁)、長行程(達50m)和靈活安裝;
4.不足:在于機械磨損需定期維護、高速運動易抖動(>1m/s),且僅支持單向測量,多自由度需多設備組合。
#光電測距傳感器
1.原理:發射紅外光并檢測反射強度,距離越近反射信號越強(無精確距離值,僅閾值判斷)。
2.應用:一般用于簡單避障或到位檢測。
3.優點:成本極低。非接觸測量:避免機械磨損,壽命長。高速響應:毫秒級檢測。抗電磁干擾:適合工業復雜環境。
4.缺點:受物體顏色、表面材質影響大。光學干擾:強光、鏡面反射、透明物體會影響精度。測距范圍限制,一般測距極限值遠低于激光。
原文:海豚之星機器人官網(aiten.com)
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31079瀏覽量
222215 -
AGV
+關注
關注
28文章
1554瀏覽量
43664
發布評論請先 登錄
安森美傳感器芯片創新突破機器人感知邊界
AGV機器人如何提升搬運效率?
AGV機器人如何精準識別庫位有無貨物?
高效搬運+靈活轉向:AGV機器人,智能物流的極簡解決方案!

【案例分享】電子谷多芯線束賦能高效產線!AGV 搬運機器人穩定連接方案

復合機器人對比傳統AGV和機械臂的優勢何在?

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
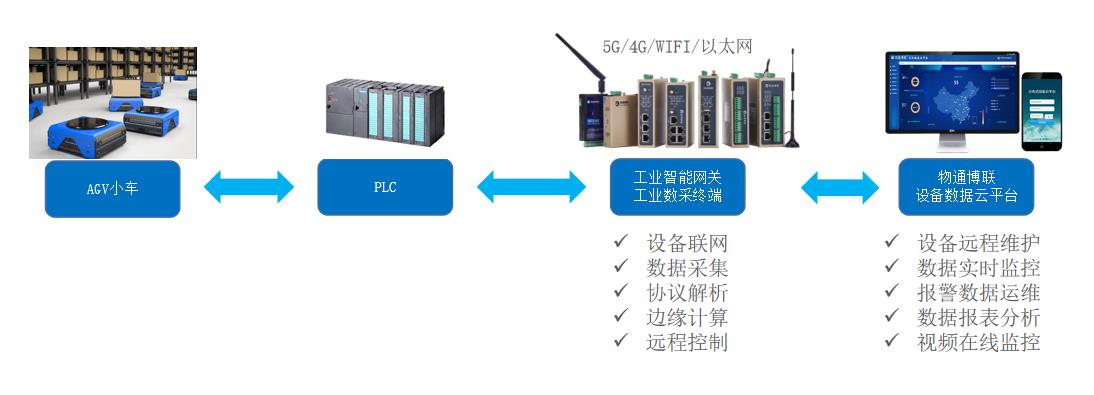
AGV搬運機器人聯網監控系統方案
機器人領域中的溫度傳感器技術及其應用:機器人溫度監測,提升機器人工作穩定性

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業機器人的特點
AGV機器人如何實現毫秒級避障?深度解析多傳感器融合的核心技術

愛普生XV7001BB角速度傳感器在工業機器人領域的應用

安森美圖像傳感器在機器人領域的應用
AGV搬運機器人耗電量因素



 工商網監
工商網監
評論