") 通過(guò)vmRT-Thread和MCP賦能具身智能開(kāi)發(fā)
通過(guò)vmRT-Thread和MCP賦能具身智能開(kāi)發(fā)

隨著邊緣AI與嵌入式系統(tǒng)的發(fā)展,智能小車、服務(wù)機(jī)器人等場(chǎng)景中亟需融合「高層智能決策」與「低層實(shí)時(shí)控制」。然而當(dāng)前常見(jiàn)系統(tǒng)架構(gòu)存在以下痛點(diǎn):
決策系統(tǒng)與控制系統(tǒng)分離:AI模型通常運(yùn)行在云端或高性能主控中,而運(yùn)動(dòng)控制仍依賴分離式MCU,通信鏈路長(zhǎng)、時(shí)延大。
通信方式低效:傳統(tǒng)使用串口、網(wǎng)絡(luò)Socket或CAN等方式連接Linux與MCU,不僅通信開(kāi)銷大,且存在不穩(wěn)定性與延遲瓶頸。
系統(tǒng)集成困難:多個(gè)獨(dú)立組件難以統(tǒng)一管理,部署復(fù)雜,調(diào)試成本高,難以快速遷移與擴(kuò)展。
缺乏標(biāo)準(zhǔn)化接口:上層應(yīng)用缺乏便捷控制底層運(yùn)動(dòng)單元的標(biāo)準(zhǔn)方式,導(dǎo)致AI決策落地困難。
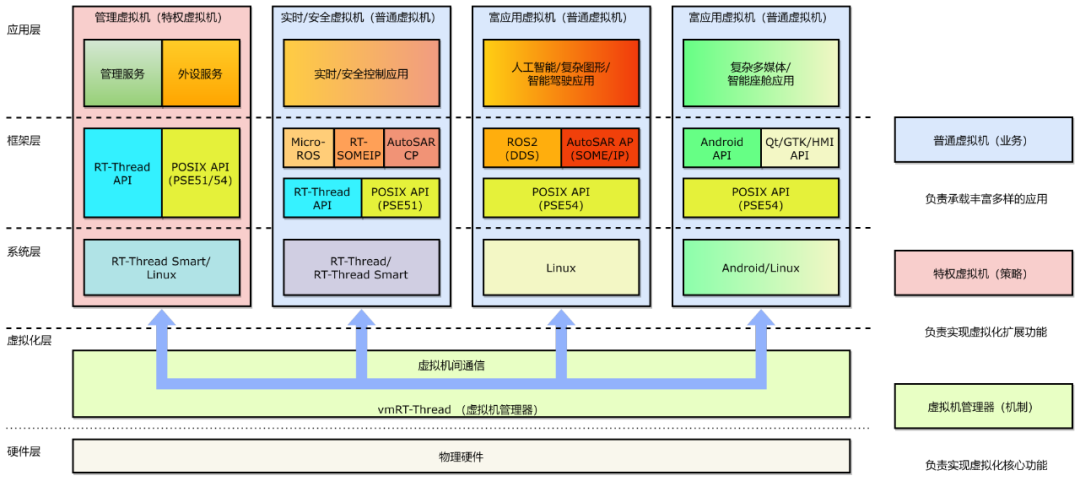
本文介紹一種基于虛擬化技術(shù)的嵌入式虛擬化集成開(kāi)發(fā)平臺(tái)(vmRTThread),其架構(gòu)如下圖所示:
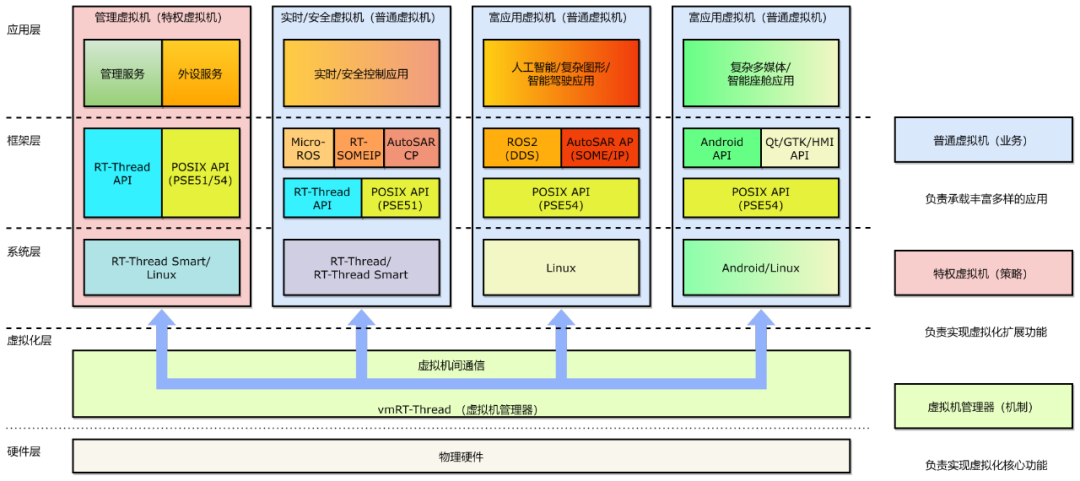
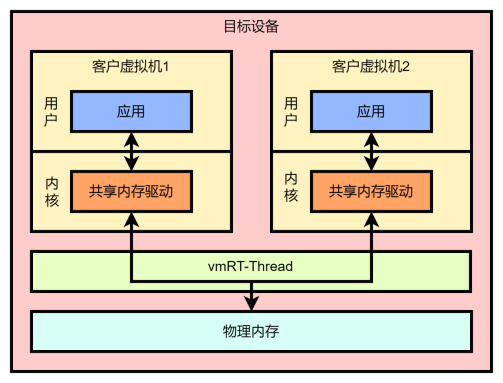
可滿足不同安全等級(jí)、實(shí)時(shí)性要求及用戶體驗(yàn)與運(yùn)算能力需求。基于該平臺(tái)可將決策系統(tǒng)與控制系統(tǒng)同時(shí)運(yùn)行于同一塊SOC;構(gòu)建一套AI驅(qū)動(dòng)+實(shí)時(shí)控制的一體化系統(tǒng);其中該平臺(tái)提供系統(tǒng)間共享內(nèi)存通信方式,具有低延遲和零拷貝的跨系統(tǒng)數(shù)據(jù)傳輸?shù)忍攸c(diǎn),且通信速度不低于100MB/s(同步),可取代傳統(tǒng)串口或網(wǎng)絡(luò)等方式,并且無(wú)需改變?cè)虚_(kāi)發(fā)方式,其示例如下圖:
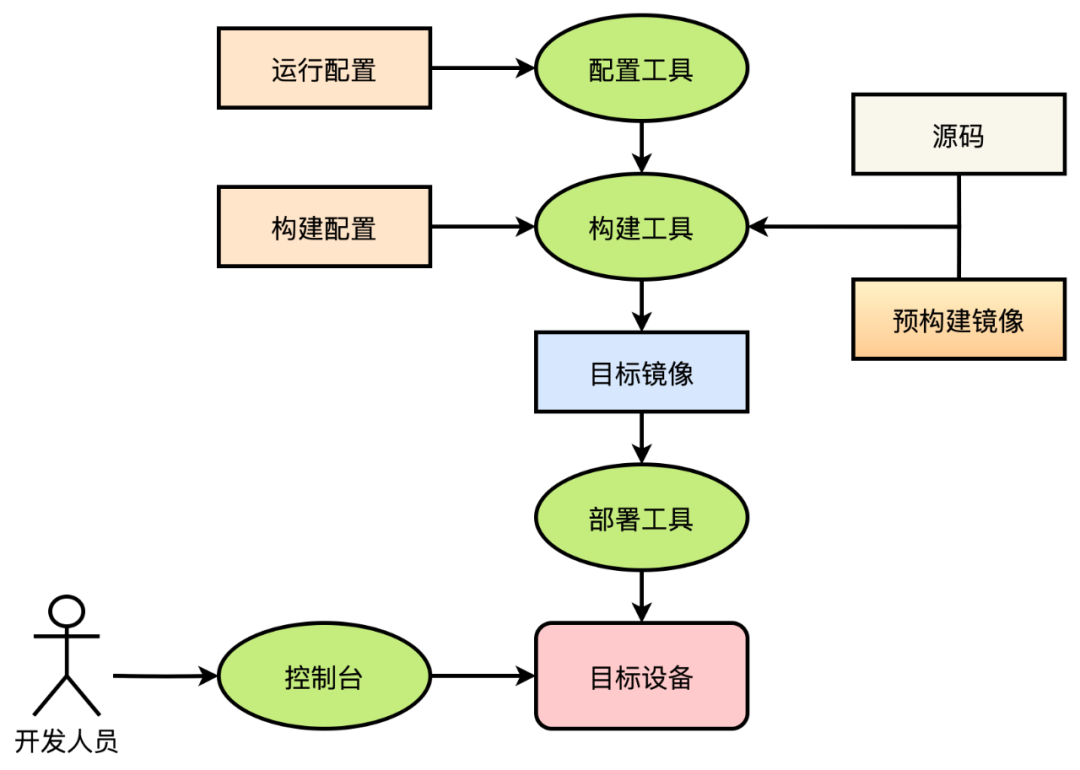
該平臺(tái)在開(kāi)發(fā)階段提供配套工具,可對(duì)多系統(tǒng)進(jìn)行統(tǒng)一管理、構(gòu)建和部署:
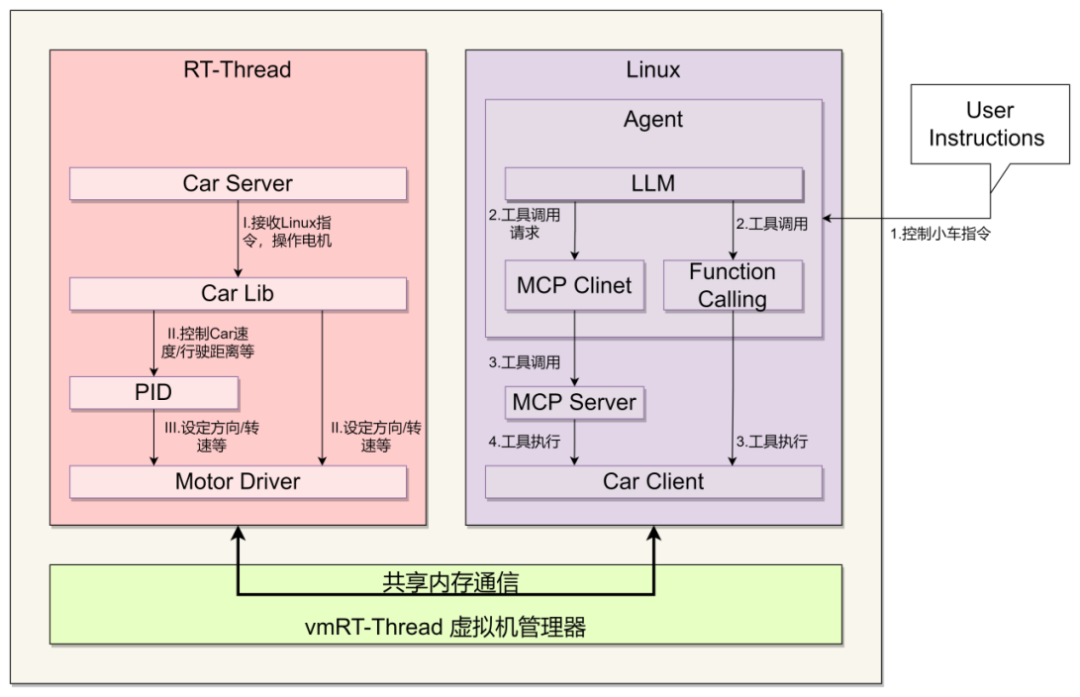
AI側(cè)可采用MCP(Model Context Protocol)或Function Calling方式完成與實(shí)時(shí)控制間的交互。
基于上述方式,采用8核開(kāi)發(fā)板來(lái)部署AI小車,通過(guò)大模型完成對(duì)小車的控制,系統(tǒng)架構(gòu)如下:
具體分為以下幾個(gè)階段執(zhí)行:
01虛擬化系統(tǒng)部署
在開(kāi)發(fā)板上部署vmRT-Thread;
創(chuàng)建兩個(gè)Guest系統(tǒng),為每個(gè)系統(tǒng)分配物理資源(CPU、內(nèi)存和外設(shè)),配置共享內(nèi)存通信:運(yùn)行Ubuntu與RT-Thread。
02控制系統(tǒng)(RT-Thread)
實(shí)現(xiàn)對(duì)電機(jī)、傳感器的實(shí)時(shí)控制;
提供小車前進(jìn)、后退、左轉(zhuǎn)和右轉(zhuǎn)接口;
創(chuàng)建線程,監(jiān)聽(tīng)共享內(nèi)存內(nèi)的指令并執(zhí)行動(dòng)作。
03決策系統(tǒng)(Ubuntu)
提供AI大模型運(yùn)行環(huán)境;
準(zhǔn)備MCP Server和MCP Client;
MCP Server:通過(guò)標(biāo)準(zhǔn)化的模型上下文協(xié)議暴露特定功能 ,如:
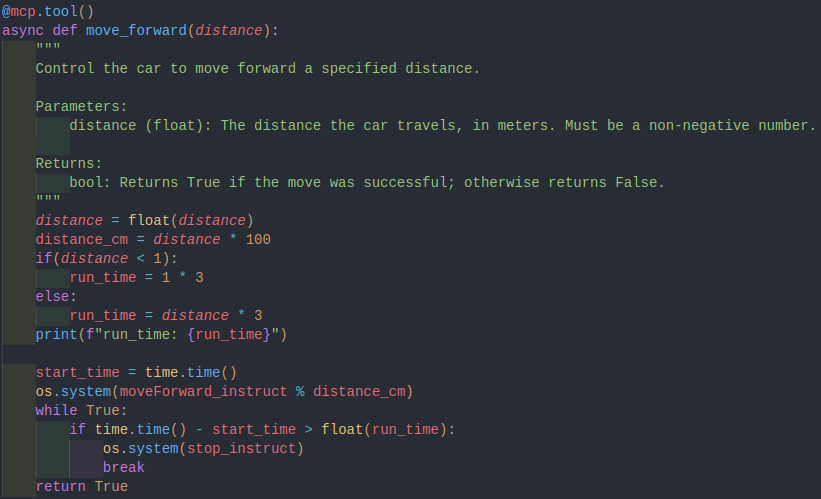 move_forward(distance)
move_forward(distance)
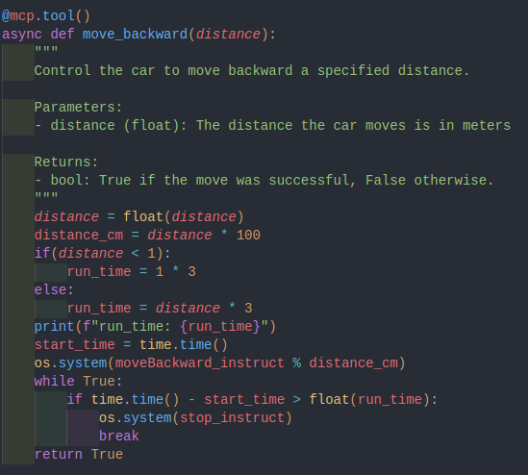 move_backward(distance)
move_backward(distance)
MCPClient :與MCP server 保持 1:1 的連接,管理大模型與MCP Server的交互流程,包括工具調(diào)用、資源訪問(wèn)、數(shù)據(jù)傳輸?shù)取?/span>
04系統(tǒng)聯(lián)調(diào)與驗(yàn)證
通過(guò)語(yǔ)言指令如“向前移動(dòng)一米”驗(yàn)證AI→MCP→RTOS→執(zhí)行器的完整鏈路;評(píng)估系統(tǒng)整體響應(yīng)時(shí)延、控制精度與穩(wěn)定性。
通過(guò)輸入語(yǔ)言命令控制小車移動(dòng):
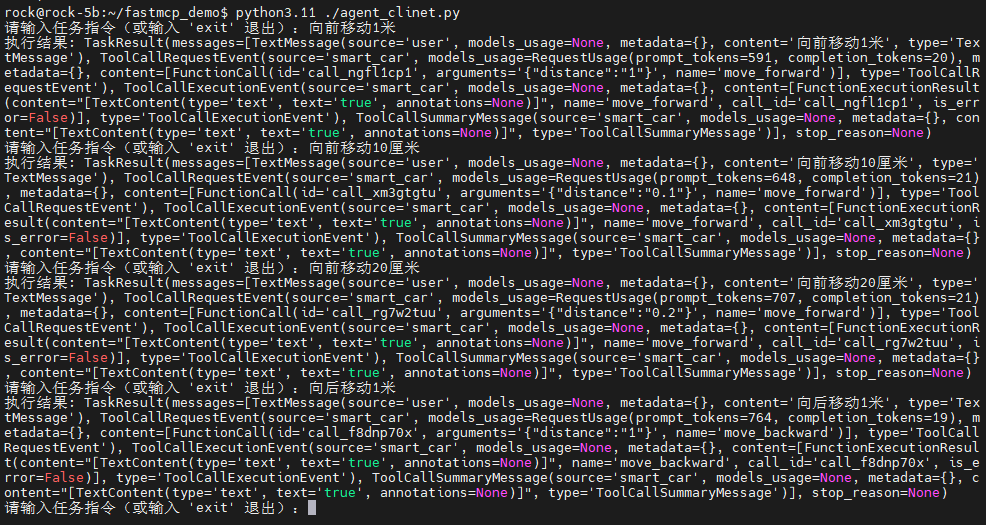
決策系統(tǒng)(Ubutnu):通過(guò)語(yǔ)言指令控制小車移動(dòng)
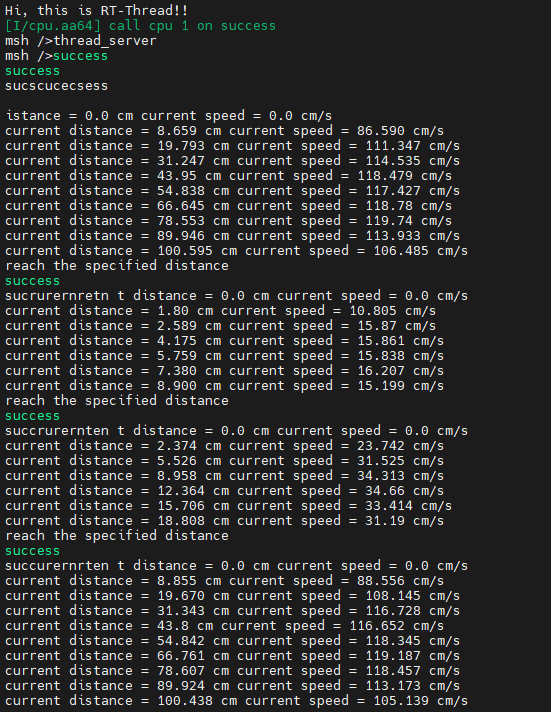
控制系統(tǒng)(RT-Thread):控制電機(jī)執(zhí)行移動(dòng)動(dòng)作
當(dāng)前嵌入式與邊緣AI場(chǎng)景中存在決策與控制系統(tǒng)分離、通信低效、集成復(fù)雜以及無(wú)法充分利用AI功能,因此,本文基于vmRT-Thread通過(guò)虛擬化技術(shù)將AI決策與實(shí)時(shí)控制集成于單一SoC,使其具備良好的可移植性與多場(chǎng)景適應(yīng)能力;采用共享內(nèi)存機(jī)制替代傳統(tǒng)通信方式,提升整體鏈路性能;為AI Agent控制具身智能提供模板。既滿足了人機(jī)交互的可能,又能滿足AI與嵌入式結(jié)合,為邊緣AI應(yīng)用提供創(chuàng)新解決方案。
-
嵌入式
+關(guān)注
關(guān)注
5198文章
20442瀏覽量
333964 -
RT-Thread
+關(guān)注
關(guān)注
32文章
1613瀏覽量
44819 -
MCP
+關(guān)注
關(guān)注
0文章
289瀏覽量
15007
發(fā)布評(píng)論請(qǐng)先 登錄
通過(guò)vmRT-Thread和ROS2賦能機(jī)器人智能開(kāi)發(fā)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
具身智能交流會(huì)
具身智能:人工智能新紀(jì)元,賦能未來(lái)科技新引擎

廣和通榮登36氪具身智能創(chuàng)新應(yīng)用案例及2024年具身智能產(chǎn)業(yè)發(fā)展研究報(bào)告

廣和通榮登36氪具身智能創(chuàng)新應(yīng)用案例及《2024年具身智能產(chǎn)業(yè)發(fā)展研究報(bào)告》

廣和通具身智能開(kāi)發(fā)平臺(tái)Fibot推動(dòng)產(chǎn)業(yè)變革
廣和通Fibot:以具身智能撬動(dòng)產(chǎn)業(yè)變革,解碼跨AI行業(yè)的產(chǎn)學(xué)研用生態(tài)密碼

RT-Thread睿賽德亮相微電子工業(yè)展:虛擬化開(kāi)啟具身智能開(kāi)發(fā)新紀(jì)元

寫(xiě)給小白的“具身智能”入門科普

廣和通發(fā)布新一代具身智能開(kāi)發(fā)平臺(tái)Fibot
廣和通具身智能開(kāi)發(fā)平臺(tái)Fibot實(shí)現(xiàn)雙臂機(jī)器人疊衣服
RT-Thread OS混合部署暨具身智能應(yīng)用開(kāi)發(fā)師資培訓(xùn)通知 | 雄鷹計(jì)劃



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論