 經緯恒潤端到端組合輔助駕駛算法測試解決方案
經緯恒潤端到端組合輔助駕駛算法測試解決方案

算法介紹
傳統組合輔助駕駛算法一般分為感知定位、決策規劃、控制三部分功能,將傳感器數據輸入后,經算法處理,輸出控制指令。傳統組合輔助駕駛算法中的決策規劃模塊,通過規則代碼迭代來應對不同場景,無法徹底解決越來越多的長尾問題。
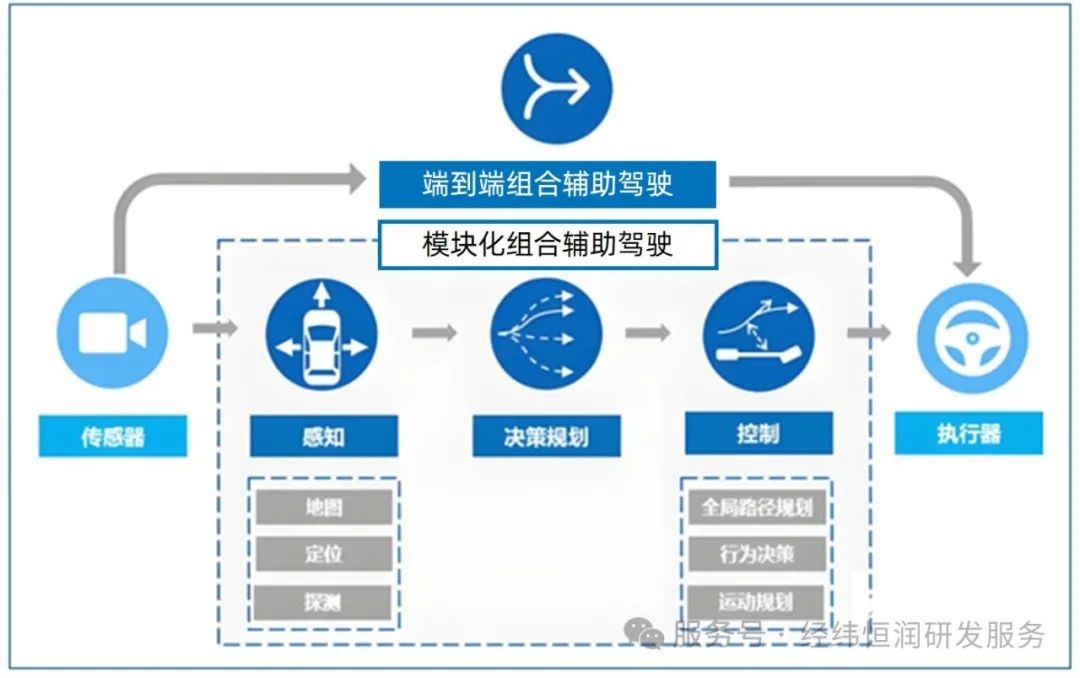
圖 1 輔助駕駛算法(圖片來源網絡)
端到端輔助駕駛算法是一種深度學習算法,該算法將傳感器數據輸入后,基于大模型直接輸出車輛控制指令。端到端輔助駕駛算法采用一體化黑盒模型,通過數據驅動,解決長尾問題。數據量越大,算法的泛化能力就越強,能夠應對的場景就越多。
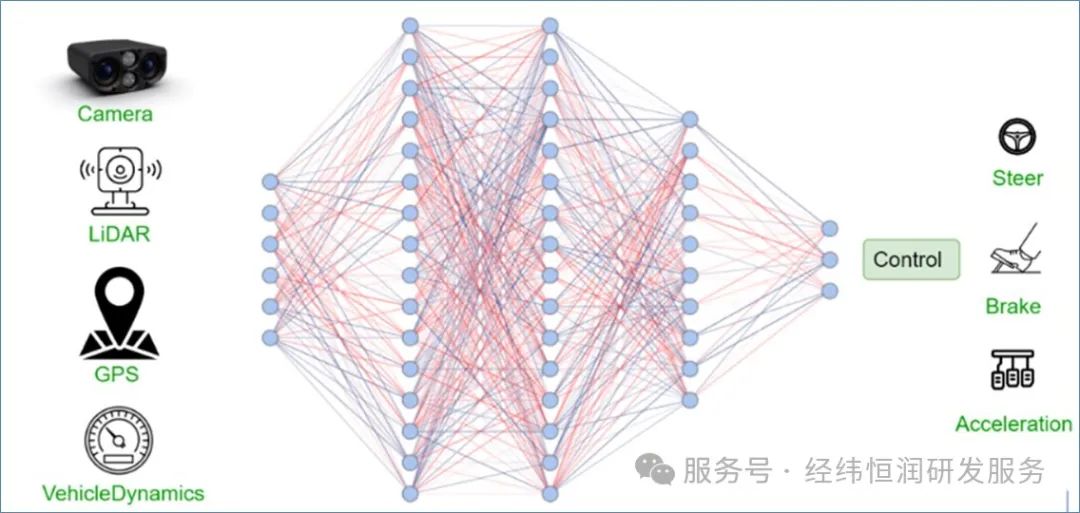
圖 2 端到端輔助駕駛算法(圖片來源網絡)
算法測試需求
端到端輔助駕駛算法的黑盒特性決定了其需要更加全面和充分的測試,來增強算法的可靠性和安全性。算法的評測維度包括:
安全性:需要評估車輛在行駛過程中是否發生過碰撞,是否存在違反交通規則的行為,能否應對危險場景。
泛化能力:需要評估車輛在未訓練過的場景中表現如何,能否處理多樣化的場景特征,應對不同的天氣、光照、交通情況。
魯棒性:當系統出現故障后,需要評估功能能否順利降級,維護車輛和人員的安全。
駕駛性能:在車輛行駛過程中,面對各種不同的場景,需要評估控制策略是否平滑,制動、加速、轉向過程是否通過優化控制策略提升乘車人員舒適性,車速規劃是否合理,通行效率是否滿足主觀要求。
算法測試解決方案
端到端輔助駕駛算法測試驗證同樣也需要基于數據驅動,解決方案主要分為開環測試和閉環測試兩種。開環測試一般采用數據回灌的方法,將實車數據回灌給算法,通過將算法輸出結果與實車對比,判斷算法功能是否激活。算法級別開環測試不需要實時仿真,可以快速大批量測試。不過開環測試解決方案中,算法脫離了與環境的交互環節,無法評估算法的閉環功能是否正確,因此需要引入閉環測試解決方案。
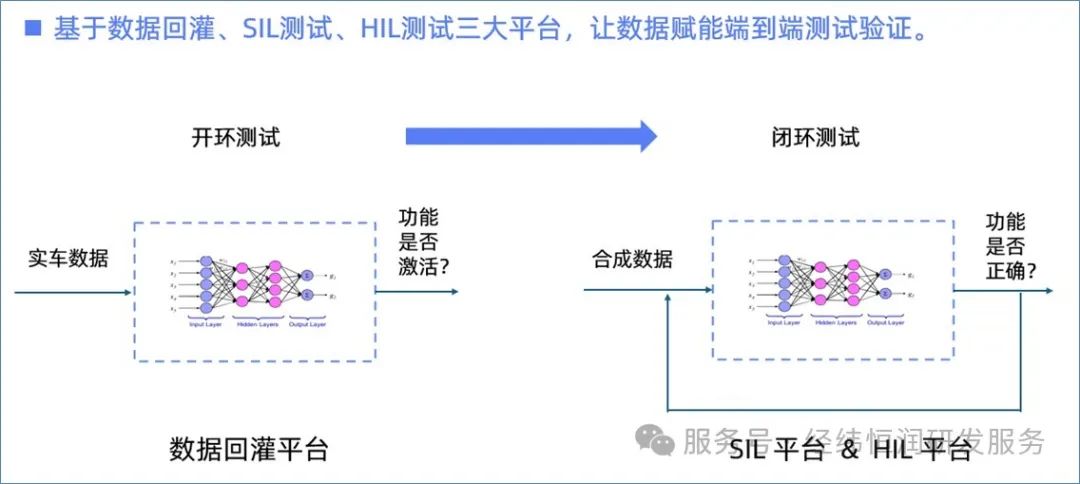
圖 3 端到端輔助駕駛算法測試解決方案
閉環測試解決方案一般采用軟件在環方案(SIL)和硬件在環方案(HIL),將仿真場景數據輸入給算法,待算法響應后,再將算法輸出指令作用于車輛動力學模型,實現算法與環境的交互,用于評估算法閉環功能是否正確。
軟件在環(SIL)測試解決方案是一種基于代碼級軟件算法的閉環測試解決方案,將算法代碼與環境模型集成,實現閉環測試。SIL系統能夠便捷地實現并發測試,有效提升測試效率,能夠更好地應對海量測試場景需求。
硬件在環(HIL)測試解決方案是一種基于真實控制器的閉環測試方案,將真實的控制器硬件與環境系統集成。HIL測試解決方案不僅能基于真實的硬件環境,驗證算法功能,還支持模擬各種極限工況,充分檢測芯片算力能否滿足算法需求。

圖 4 端到端輔助駕駛算法測試流程
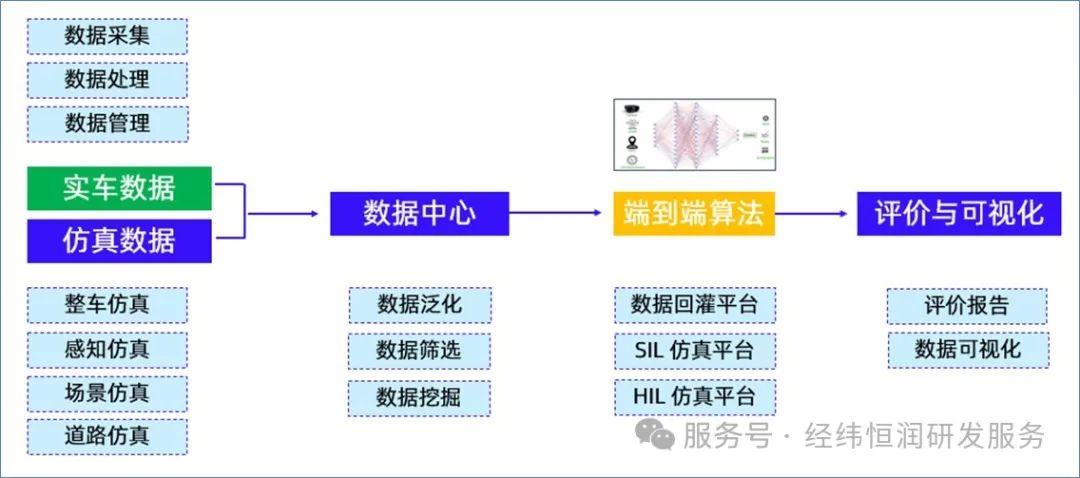
圖 5 數據驅動端到端輔助算法測試
經緯恒潤基于自主研發的工具鏈,可提供成熟的端到端輔助駕駛算法測試解決方案,具備數據回灌測試、SIL仿真測試、HIL仿真測試全棧技術能力,本期以SIL和HIL測試解決方案為主做簡要介紹。
軟件在環SIL測試解決方案
TVM是經緯恒潤自主研發的一款SIL仿真軟件平臺,可將待測算法集成到TVM軟件中,并集成整車模型、場景模型、感知模型,實現算法閉環功能測試。采用docker技術,將測試節點容器化,實現多節點并行仿真測試,加速算法的迭代驗證。
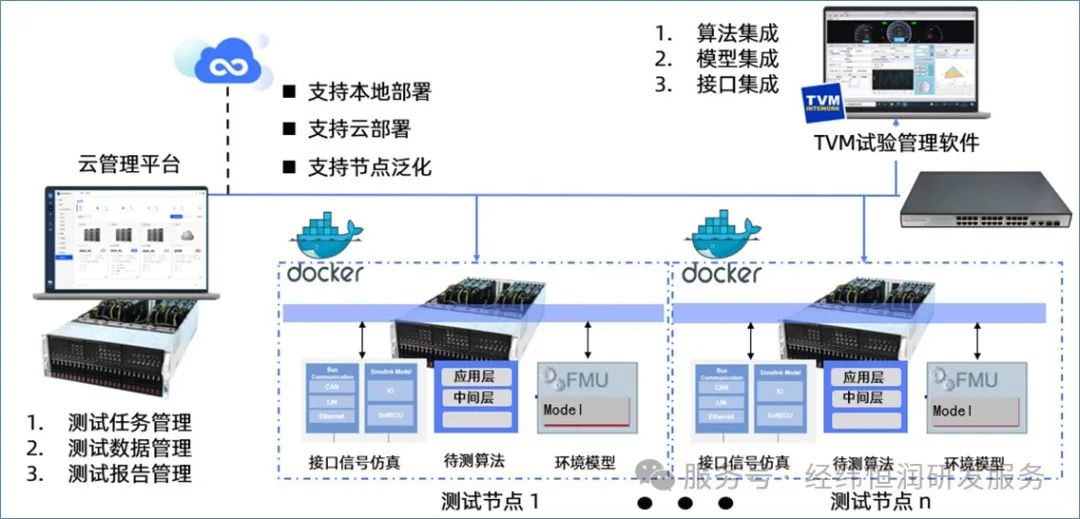
圖 6 SIL 云泛化測試解決方案
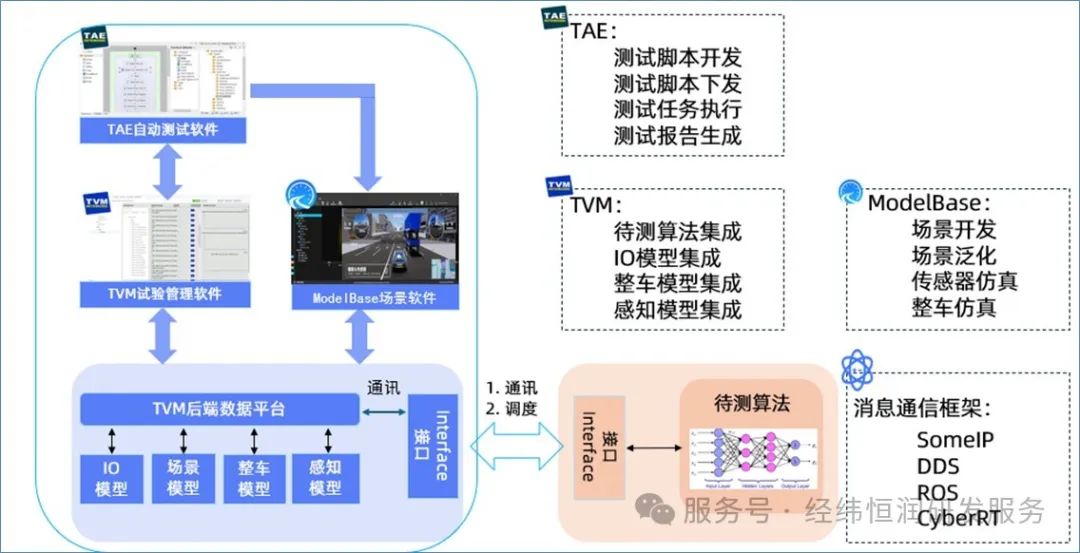
圖 7 SIL單節點測試解決方案
硬件在環HIL測試解決方案
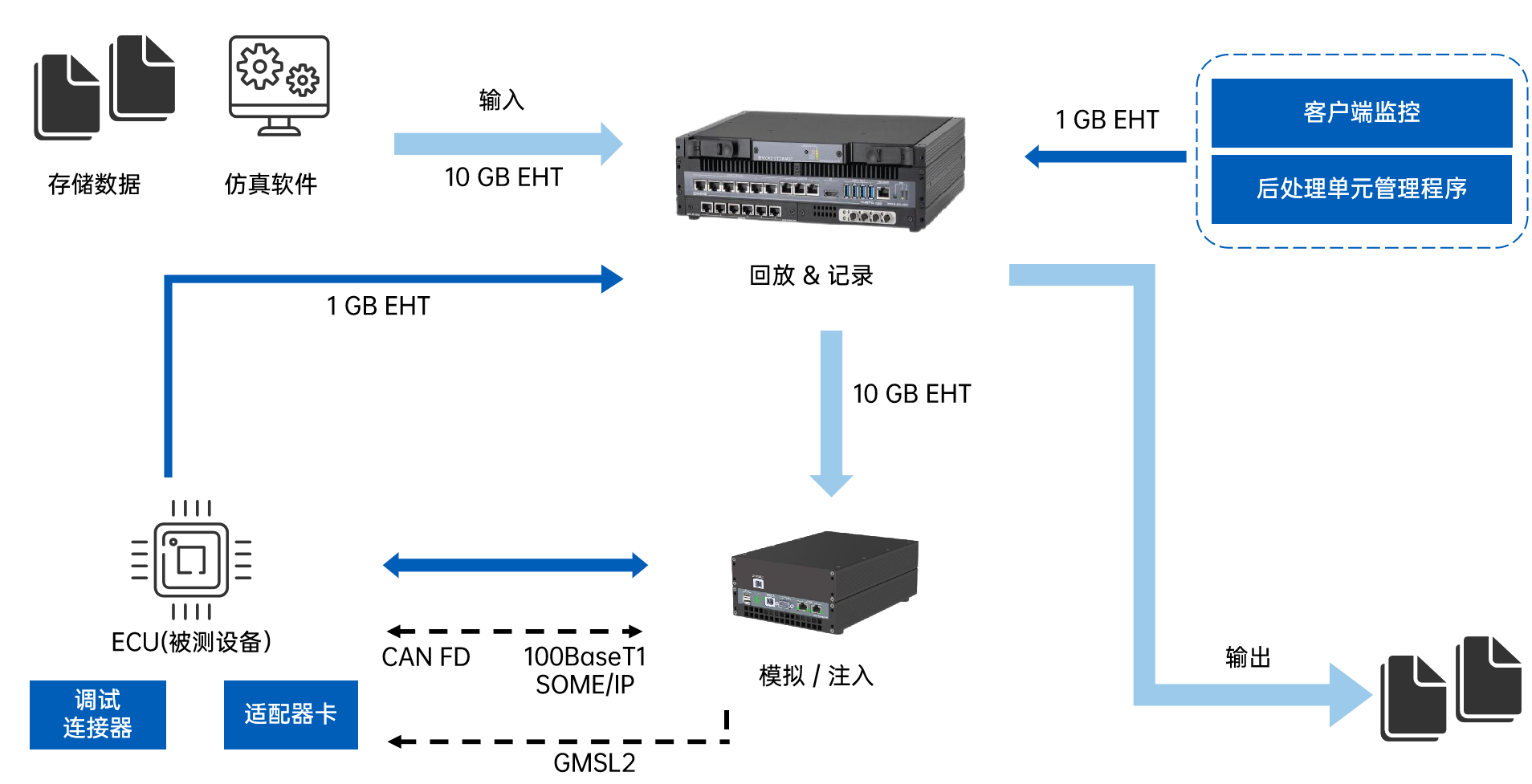
硬件在環HIL系統是一種集成真實控制器的閉環仿真測試系統,該系統集成了控制器硬件和與之交互的硬件板卡,基于實時的仿真環境,實現算法的閉環功能驗證。硬件板卡包括用于攝像頭仿真的視頻注入板卡(以視頻注入方案為例),用于超聲波仿真的DSI3板卡(以DSI3協議仿真為例),用于激光雷達仿真的車載以太網板卡(以以太網協議仿真為例),以及整車通訊用的CAN、CANFD板卡和車載以太網板卡等。硬件在環HIL測試系統,可以完成基于控制器硬件的功能驗證,包括控制器硬件接口、芯片算力、功能邏輯、功能安全和預期功能安全等。

圖 8 HIL 測試解決方案
車輛動力學和場景仿真軟件ModelBase介紹
端到端輔助駕駛算法的測試場景可細分為基礎功能測試場景、泛化功能測試場景、極限功能測試場景和駕駛特性測試場景等。
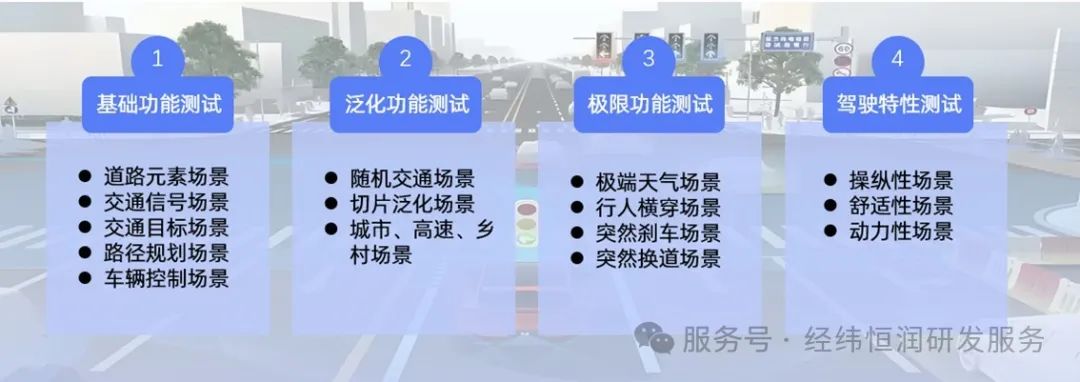
圖 9 端到端輔助駕駛算法測試場景需求
從算法輸入的角度來說,場景的本質是數據,通過提供詳盡的數據信息,可使得仿真測試實現更大價值。端到端輔助駕駛算法對數據需求主要分為四大類,分別為傳感器數據、場景數據、道路數據和車輛數據,其中傳感器數據又分為攝像頭數據、激光雷達數據、毫米波雷達數據、超聲波雷達數據、地圖數據和GNSS&INS定位數據等。
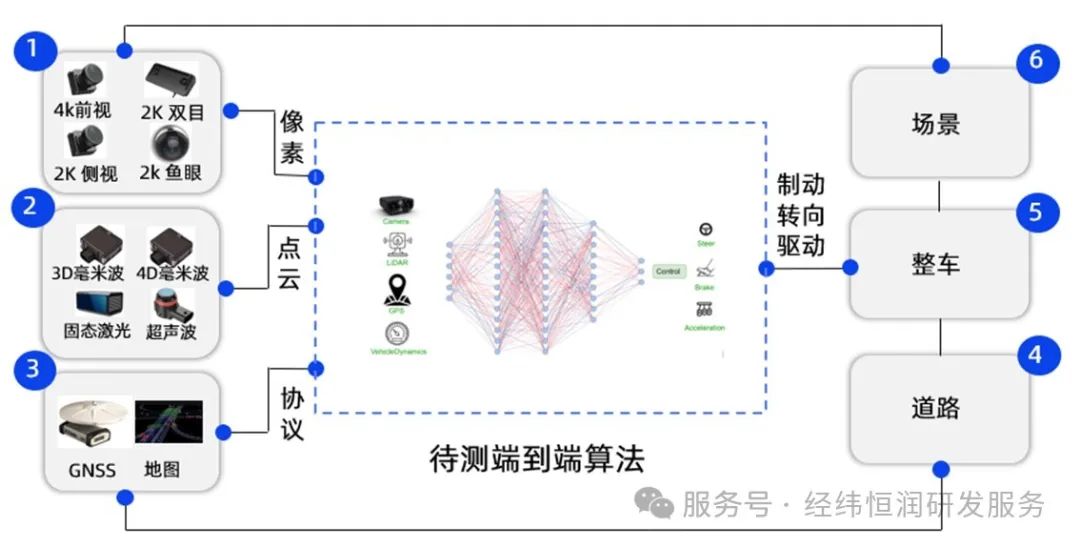
圖 10 端到端輔助駕駛算法數據需求
ModelBase是經緯恒潤自主研發的一款專業的車輛動力學和場景仿真軟件,該軟件實現了傳感器仿真、道路仿真、場景仿真和車輛模型仿真的功能。基于該平臺可以定制化實現不同車型對傳感器的仿真需求、對海量場景的仿真需求,對道路的仿真需求,以及對車輛運動的仿真需求。

圖 11 車輛動力學和場景仿真軟件 ModelBase
測試案例介紹
SIL 仿真應用案例
國內某智駕公司的SIL測試應用案例,該項目采用了經緯恒潤全棧自主研發的軟件平臺,主要包括試驗管理軟件TVM、車輛動力學和場景仿真軟件ModelBase、自動化測試軟件TAE,實現了組合駕駛輔助算法的SIL閉環仿真測試。
圖 12 SIL 仿真應用案例
客戶收益:
SIL測試設備開發周期縮短為2個月,快速匹配軟件開發階段算法接口、功能閉環的測試需求。
實現了測試節點并發執行,顯著提升測試效率。
通過ModelBase車輛動力學和場景仿真軟件,靈活創建了各種罕見場景,采用場景泛化技術,提升了測試場景的覆蓋度。
HIL仿真應用案例
國內某主機廠的HIL應用案例,該項目采用了經緯恒潤自主研發的軟硬件平臺,主要包括經緯恒潤TESTBASE實時仿真硬件系統、攝像頭視頻注入仿真模塊、激光雷達點云仿真模塊、毫米波雷達總線仿真模塊、超聲波雷達DSI3仿真模塊、GPS&IMU總線仿真和地圖仿真模塊、車輛動力學和場景仿真軟件ModelBase、試驗管理軟件TCS、自動測試執行軟件TAE、故障注入軟件EES和總線監控軟件VBA等,實現了組合駕駛輔助的閉環仿真測試。

圖 13 HIL 仿真應用案例
客戶收益:
基于HIL硬件環境充分驗證了控制器功能,加速了控制器研發進程;
實現了控制器的功能邏輯測試和功能安全測試;
基于HIL環境復現實車上的測試問題,并對問題點進行了泛化測試。
-
算法
+關注
關注
23文章
4786瀏覽量
98256 -
仿真軟件
+關注
關注
21文章
283瀏覽量
31920 -
輔助駕駛
+關注
關注
1文章
425瀏覽量
15813 -
經緯恒潤
+關注
關注
1文章
418瀏覽量
2679
原文標題:經緯恒潤自主工具鏈助力端到端組合輔助駕駛算法驗證
文章出處:【微信號:經緯恒潤研發服務,微信公眾號:經緯恒潤研發服務】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
經緯恒潤為大眾集團系列車型提供智能駕駛相關研發服務及解決方案
經緯恒潤與北極雄芯達成戰略合作,共同探索基于Chiplet架構的智能駕駛整體解決方案
經緯恒潤與黑芝麻智能達成戰略合作,攜手打造全場景智能駕駛、智能座艙解決方案


康謀方案 | 基于場景的端到端硬件在環(HiL)測試智能解決方案

康謀 aiSim 攜經緯恒潤煥新 HIL 測試,誠邀集成商共建生態!




 工商網監
工商網監
評論