 中科院理化所:仿生指尖!研究空間各向異性液態金屬電感傳感器實現超寬量程、高線性度與卓越穩定性,觸
中科院理化所:仿生指尖!研究空間各向異性液態金屬電感傳感器實現超寬量程、高線性度與卓越穩定性,觸

隨著機器人技術向更智能、更精細化方向發展,提升機器人的觸覺感知能力變得至關重要。然而,現有的柔性觸覺傳感器在實現多維度、寬量程、高可靠性的觸覺感知方面仍面臨諸多挑戰。為了解決這些難題,科研人員不斷從生物系統中汲取靈感。人類指尖擁有精巧的結構和復雜的神經感知系統,能夠敏銳地感知來自不同方向和強度的壓力,并迅速做出反應。
受此啟發,中國科學院理化技術研究所和北京林業大學聯合團隊巧妙地將人類指尖的多層結構和力學感受器概念引入傳感器設計,創新性地開發出一種仿生各向異性電感液態金屬傳感器 (AI-LMS)。這種傳感器具有與人類指尖尺寸相當的體積,實現了超寬動態范圍、高線性度、卓越穩定性的多軸壓力感知,并展現出指尖般的空間各向異性觸覺特性,為柔性機器人觸覺感知技術帶來變革。該研究成果以“Fingertip-Inspired Spatially Anisotropic Inductive Liquid Metal Sensors with Ultra-Wide Range, High Linearity and Exceptional Stability”為題,于近日在Advanced Materials在線發表。文章第一作者為理化所博士生李楠,通訊作者為理化所劉靜研究員和北林王磊副教授。
與傳統的壓阻、壓容等傳感器相比,AI-LMS采用的電感信號展現出顯著的優勢:
1. 超寬量程與高線性度:基于Ecoflex和PDMS的AI-LMS分別實現了42.13 kPa和137.72 kPa的壓力檢測范圍,且在整個量程內保持了極高的線性度(R2> 0.997)。更令人鼓舞的是,通過創新性的開放式端口設計,傳感器的量程分別擴展至182.66 kPa和1414.42 kPa,提升了4倍和9.5倍,展現出驚人的潛力。
2. 卓越的信號穩定性:實驗表明,AI-LMS的電感信號在長期測試和循環加載下表現出極高的穩定性,幾乎沒有漂移,遠優于電阻信號。
3. 高分辨率與快速響應:AI-LMS能夠靈敏地捕捉到70.5 Pa (Ecoflex)和1.764 kPa (PDMS)的微小壓力,響應時間僅為0.15-0.4秒。
為了進一步提升傳感器的性能,研究團隊還將AI-LMS與深度神經網絡(DNN)模型相結合,成功實現了對多軸壓力的精確解耦。通過DNN模型,傳感器可以同時識別和量化正向和側向壓力,為復雜觸覺信息的解析提供了有力工具。
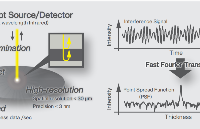
為展示AI-LMS的實際應用價值,研究人員開發了基于AI-LMS的高精度三維表面掃描重建系統。該系統能夠準確捕捉物體表面精細的紋理信息,并高保真地重建三維輪廓。此外,研究人員還將AI-LMS集成到機器人指尖,成功實現了對不同手指抓取動作和力度的實時分辨,展示了其在柔性機器人靈巧操作領域的巨大潛力。
該研究工作不僅在傳感器設計和制造方面取得了重要突破,更揭示了電感信號在柔性觸覺感知領域的獨特優勢。AI-LMS的各向異性特性、超寬量程、高線性度與卓越穩定性,使其有望成為下一代柔性機器人觸覺傳感器的理想選擇,為推動柔性機器人技術的發展和應用注入新的活力。
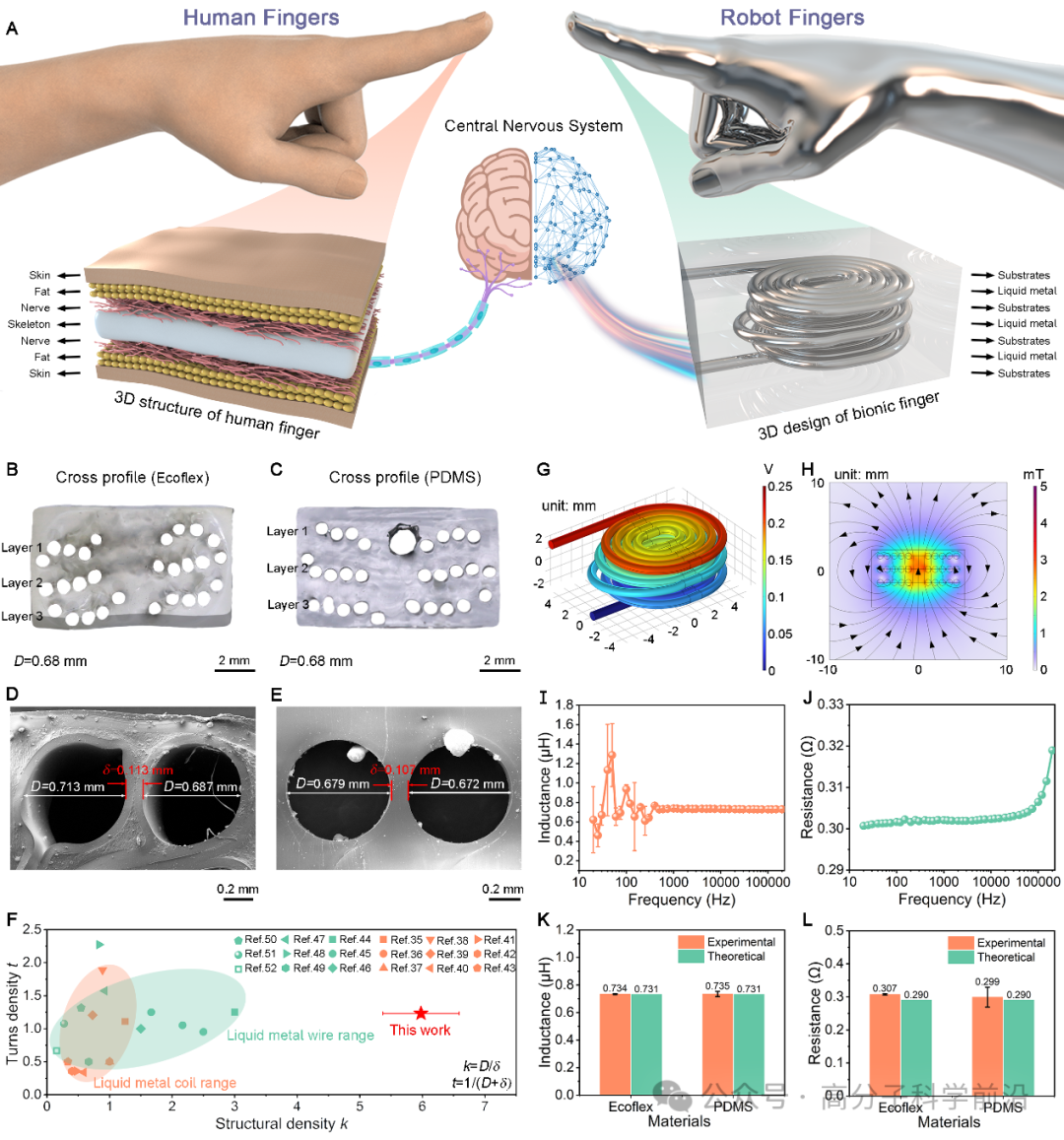
圖1. AI-LMS的基本特性。
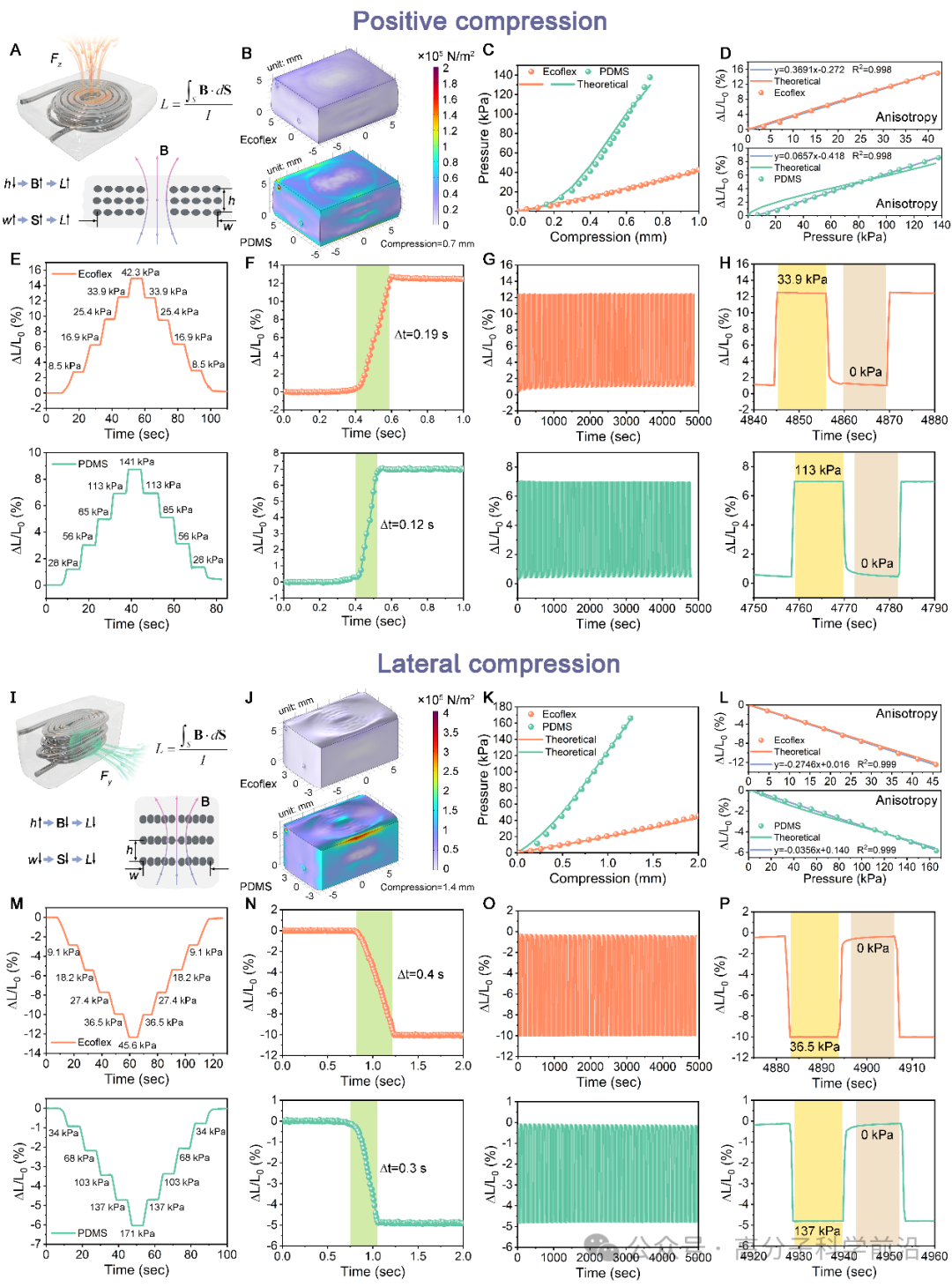
圖2. AI-LMS的各向異性傳感能力。
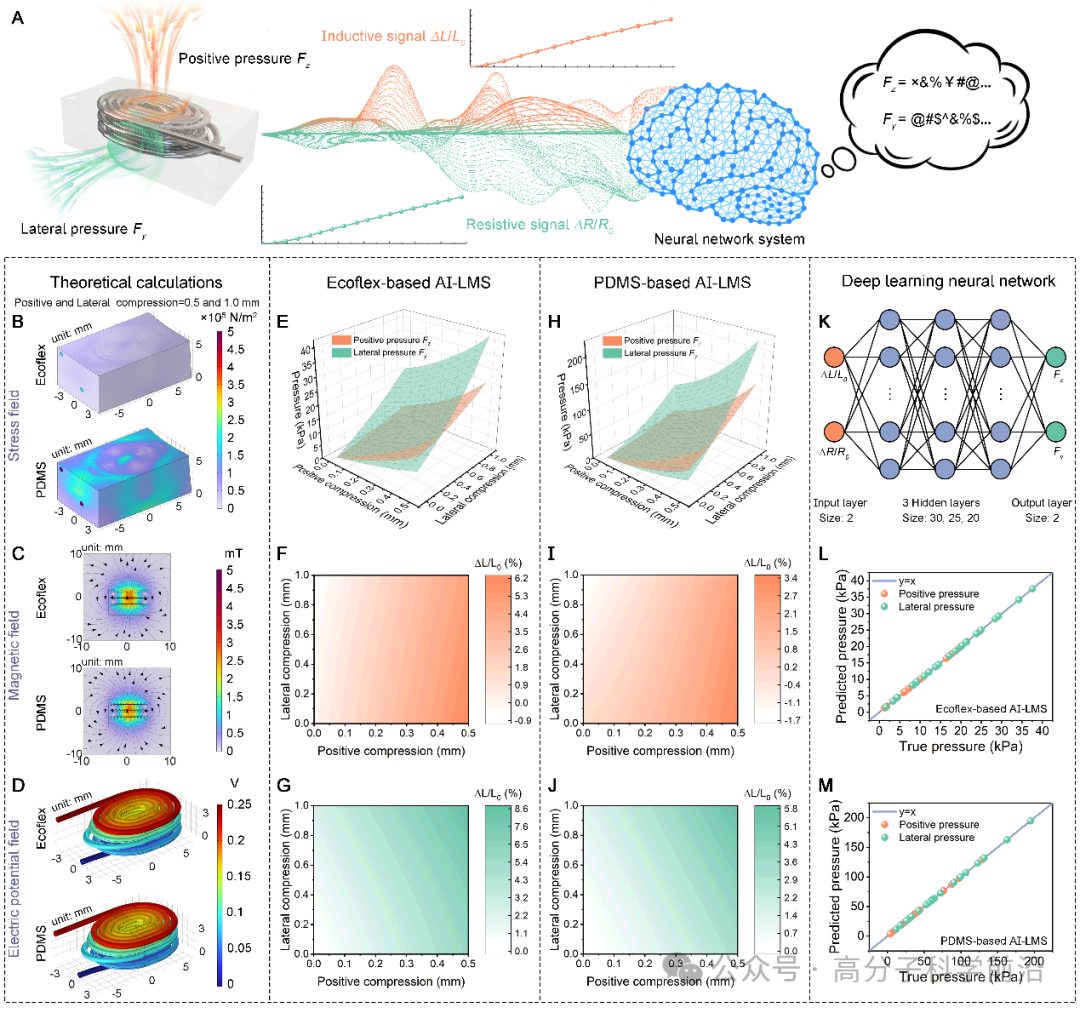
圖3. AI-LMS的多軸壓力傳感能力。
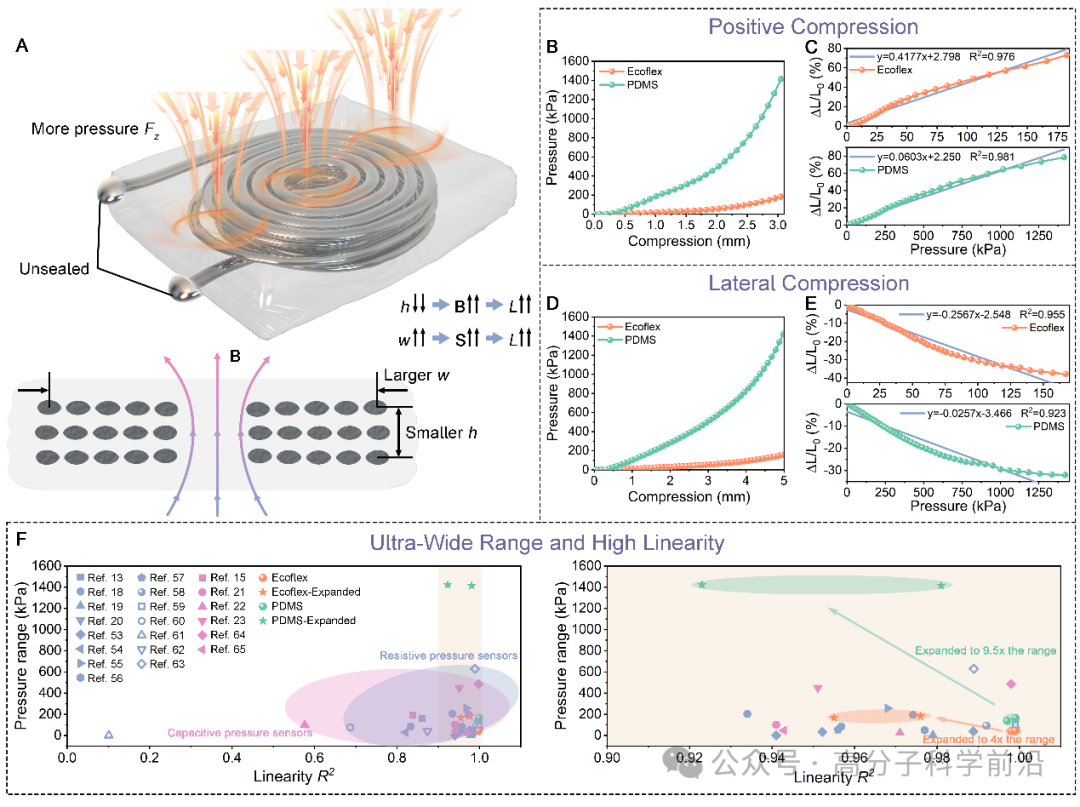
圖4. AI-LMS傳感范圍的顯著擴展。

圖5. 基于AI-LMS的三維表面結構掃描和重建系統。
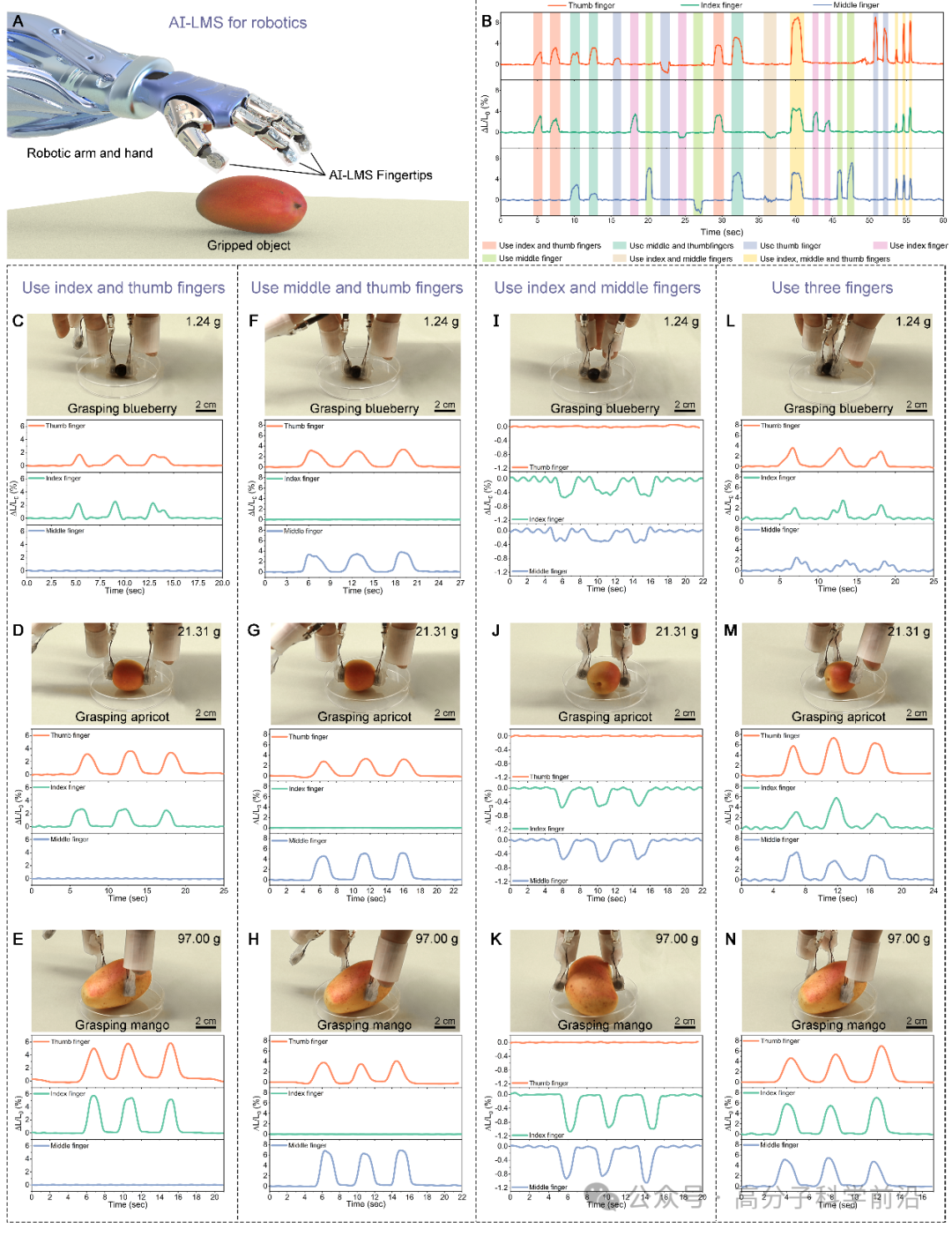
圖6. AI-LMS仿生指尖在機器人技術中的應用。
論文信息: N. Li, F. Zhan, M. Guo, X. Yuan, X. Chen, Y. Li, G. Zhang, L. Wang, J. Liu, Fingertip-Inspired Spatially Anisotropic Inductive Liquid Metal Sensors with Ultra-Wide Range, High Linearity and Exceptional Stability. Adv. Mater. 2025, 2419524. 原文鏈接: https://doi.org/10.1002/adma.202419524
審核編輯 黃宇
-
AI
+關注
關注
91文章
39755瀏覽量
301354 -
電感傳感器
+關注
關注
0文章
32瀏覽量
9399
發布評論請先 登錄
各向異性導電膠與各向同性導電膠的區別

電容式液位傳感器的精度與穩定性:技術解析與場景表現
中科院/重慶大學:仿生“電子皮膚”獲突破!梯度模量設計讓傳感器實現“寬壓域、高靈敏、抗漂移”

高精度壓力測量器:國產萬分級精度零點穩定性和滿量程穩定性能應用場景分析
【新啟航】碳化硅 TTV 厚度測量中的各向異性效應及其修正算法
中科院寧波材料所:雙結構石墨烯/PDMS復合傳感器,用于可穿戴設備應用
【新啟航】如何解決碳化硅襯底 TTV 厚度測量中的各向異性干擾問題
濕法刻蝕是各向異性的原因
大連義邦Nanopaint壓感油墨為智能各向異性壓阻傳感器提供解決方案

雙電機分布式驅動汽車高速穩定性機電耦合控制
詳解各向異性導電膠的原理
碳化硅襯底厚度測量探頭溫漂與材料各向異性的耦合影響研究



 工商網監
工商網監
評論