 施耐德M241與MR30-FBS-MT 在Machine Expert V2.0的組態過程
施耐德M241與MR30-FBS-MT 在Machine Expert V2.0的組態過程

一、系統概述
MR30分布式IO是一個高度靈活的可擴展分布式 I/O 系統,MR30-FBC-MT用于通過 Modbus TCP 總線將過程信號連接到上一級控制器。
具有以下特點:
結構緊湊
PUSH IN端子,易于安裝,布線簡單
靈活性高:開關量模塊單模塊最大32通道,模擬量模塊最大16通道,每個耦合器最大可擴展31個模塊
通信標準為 Modbus TCP
可擴展設計:允許用戶根據當地的需求調整具體的組態
支持自由熱插拔
二、實驗材料
| 序號 | 名稱 | 訂貨號 | 數量 | 品牌 |
| 1 | 耦合器 | MR30-FBC-MT | 1 | 明達 |
| 2 | 開關量輸入模塊 | MR30-16DI | 1 | 明達 |
| 3 | 開關量輸出模塊 | MR30-16DO | 1 | 明達 |
| 4 | 模擬量輸入模塊 | MR30-08AI-I4W | 1 | 明達 |
| 5 | 模擬量輸出模塊 | MR30-08AI-U | 1 | 明達 |
| 6 | M241 | TM241CEC24T | 1 | 施耐德 |
| 7 | 開關電源 | NDR-120-24 | 1 | 明緯 |
| 8 | 組態軟件 | Machine Expert V2.0 | 1 | 施耐德 |
| 9 | GSD文件 | GSDML-V2.42-MICT-PN-20240620 | 1 | 明達 |
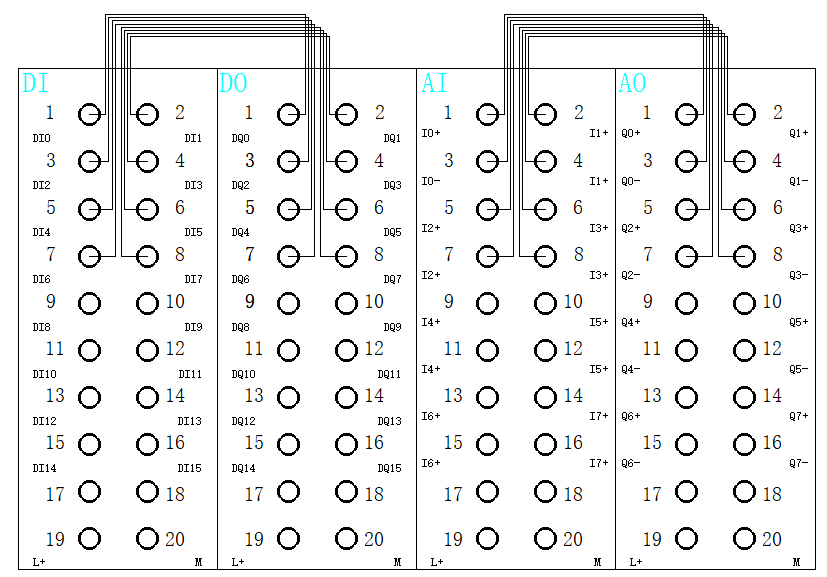
硬件接線
三、組態過程
組態步驟:
安裝MR30-FBC-MT及分布式IO模塊
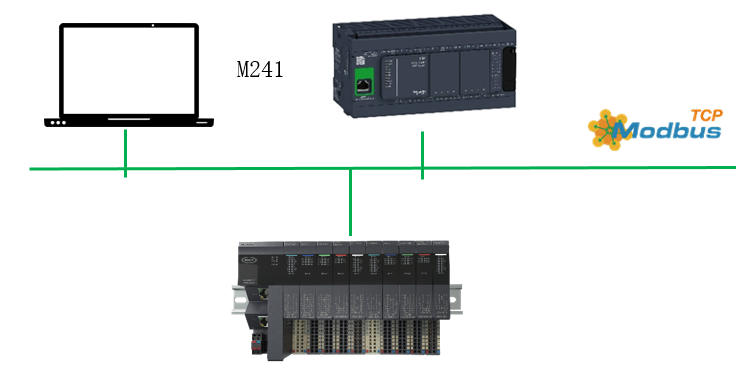
連接MT241和MR30-FBC-PN
接通控制電源,使用IO配置軟件裝IO配置下載至耦合器
在Machine Expert V2.0中通過指令塊讀寫IO模塊并
將組態下載到控制器,控制IO狀態并檢查LED指示燈
觀察IO指示燈及模擬量輸入輸出值是否與實際操作一致
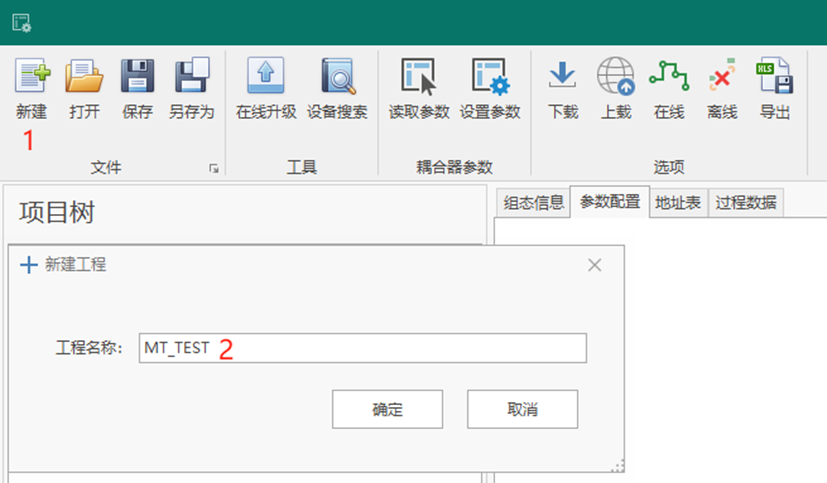
2.新建項目,此示例命名為MT_TEST,點擊確定。
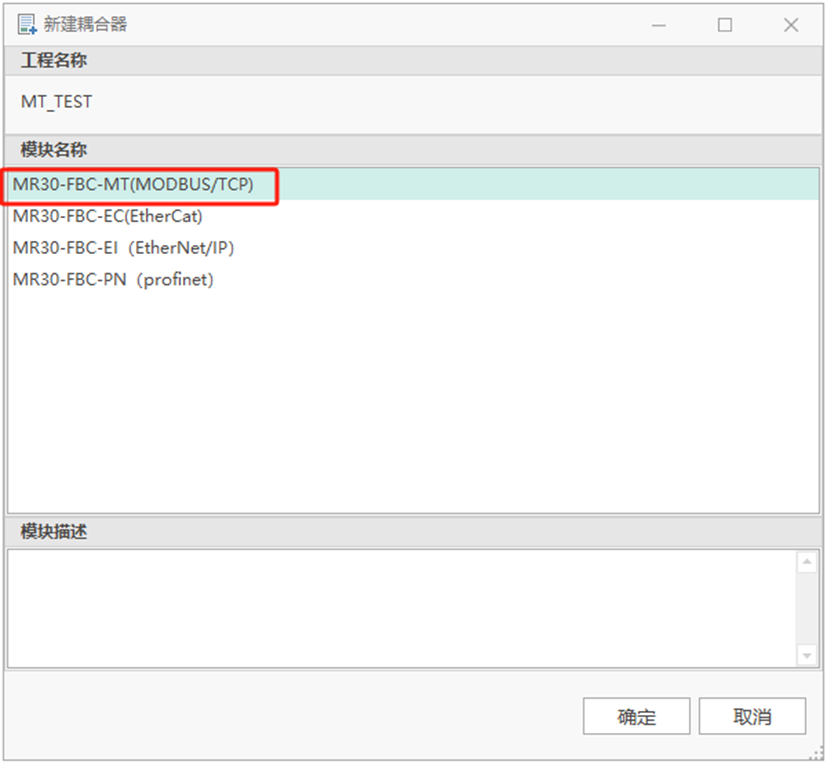
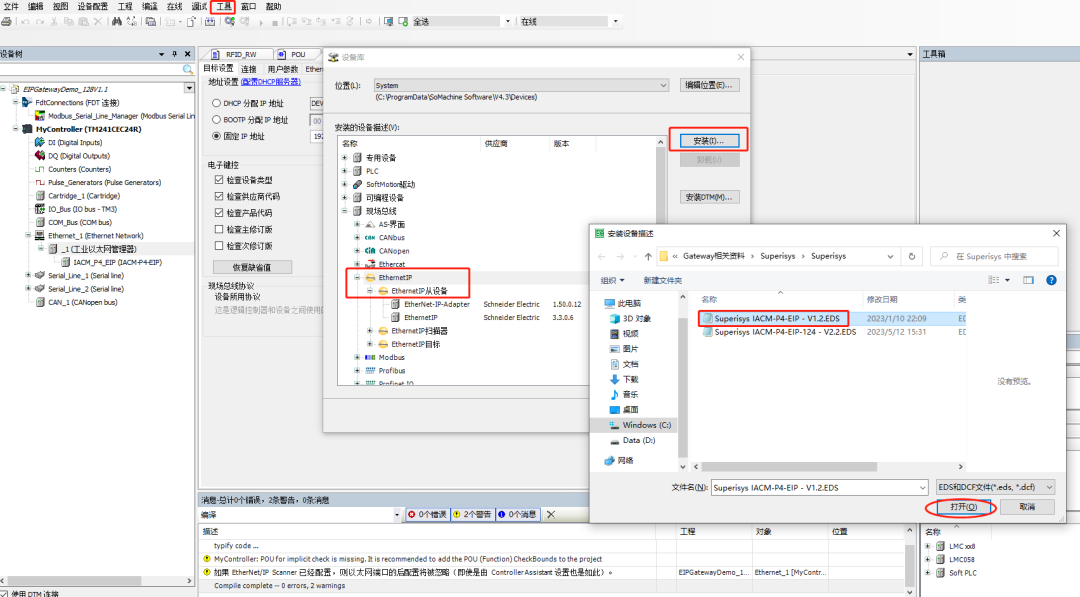
3.右鍵MT_TEST,選擇新建耦合器,選擇MR30-FBC-MT(MODBUS/TCP)后,點擊確定。
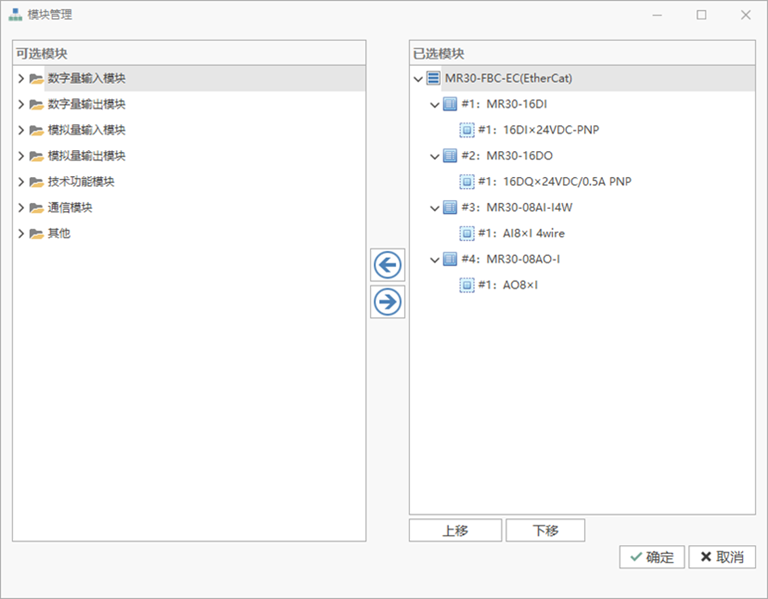
添加模塊
右鍵耦合器,選擇模塊管理,依次將MR30-16DI、MR30-16DO、MR30-08A1-14W、MR30-08AO-I添加至右側已選模塊后點擊確定,如下圖所示。

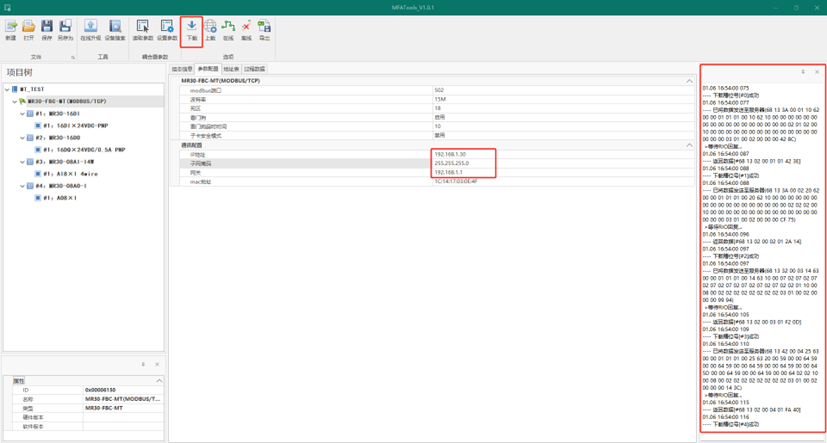
配置下載
在參數配置面設置好IP地址、子網掩碼和網關后,點擊下載,如下圖所示。
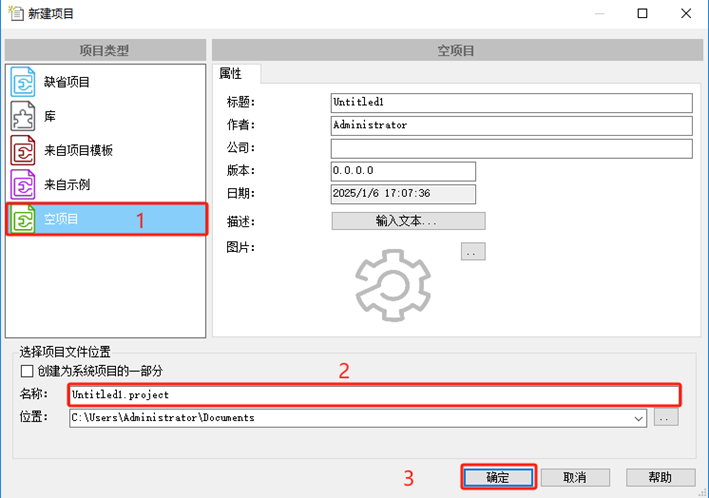
Machine Expert新建項目
打開Machine Expert V2.0,新建項目,點擊空項目,設置項目名稱后點擊確定,如下圖所示。
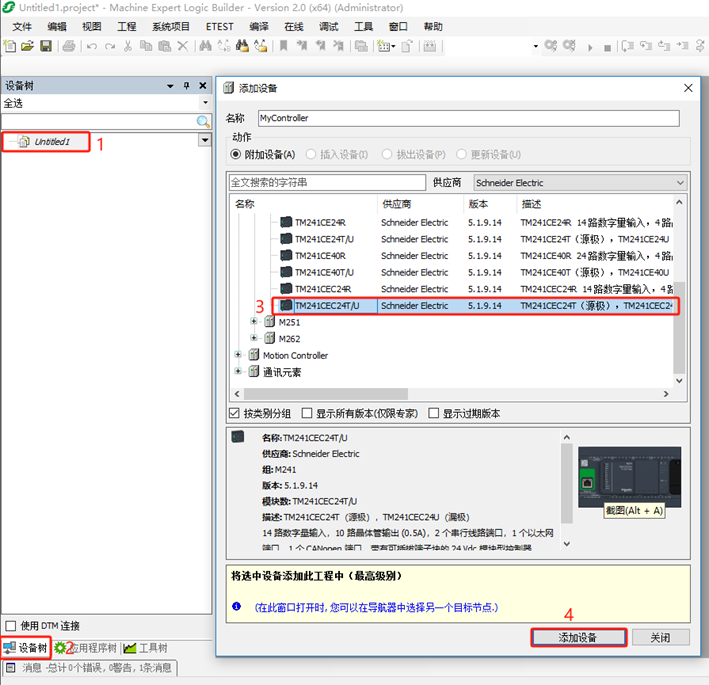
添加CPU
點Untited1,點擊設備樹,在Logic Controller→M241→TM241CEC24T/U目錄下選擇CPU后,點擊添加設備并關閉對應框。
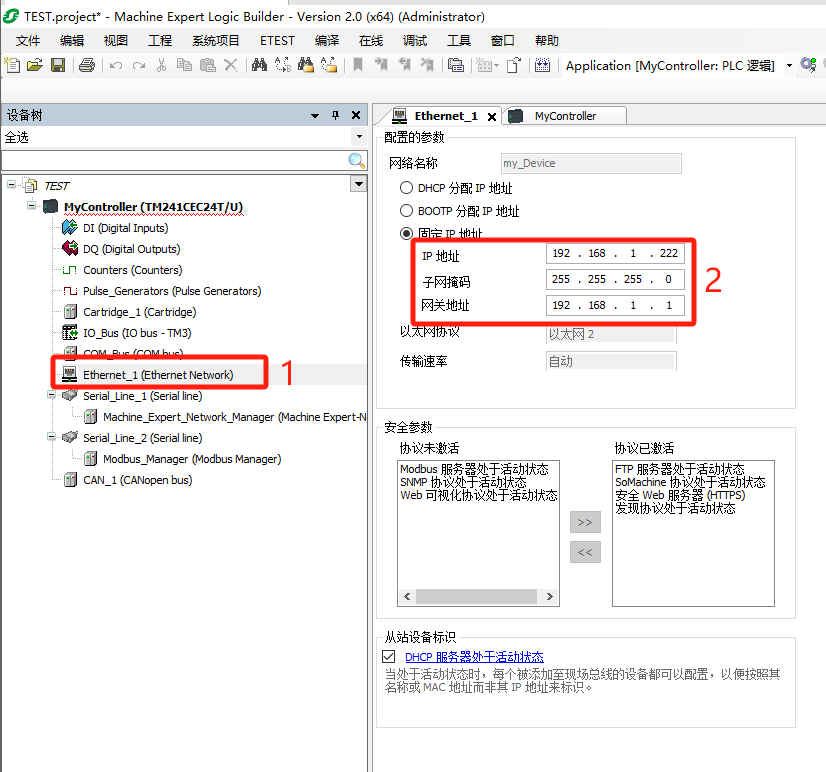
設置CPU IP地址
雙擊設備樹中的Ethernet_1(Ethernet Network),在右側配置的參數中設置IP地址,子網掩碼及網關地址等參數,如下圖所示。
在編程界面調用ADDM、READ_VAR和WRITE_VAR功能塊
在程序段中插入ADDM、READ_VAR和WRITE_VAR功能塊
添加地址轉換功能塊
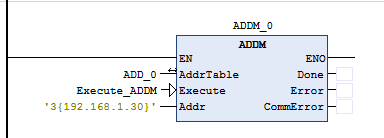
ADDM_0釋義:
ADD_0為Modbus TCP服務器轉換后的地址;
Execute_ADDM為觸摸位;
'3{192.168.1.30}'中的3為端口號,192.168.1.30為Modbus TCP服務器IP地址
添加讀取開關量輸入功能塊
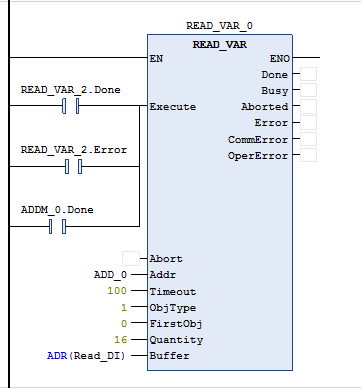
READ_VAR_0釋義:
ADDM_0.Done:為ADDM功能塊激活完成信號,用于觸發READ_VAR功能塊;
READ_VAR_2.Done和READ_VAR_2.Error:為READ_VAR功能塊的完成和錯誤信號,用于觸發本功能塊,并與其它功能塊形成輪循;
Addr:為ADDM功能塊轉換后的IP地址;
objType:為功能碼,1表示開關量輸入信號;
FirstObj:表示要讀取的開關量輸入的第1個地址;
Quantity:表示要讀取的開關量輸入的數量;
Buffer:表示客戶機的緩存地址,數量類型為Word型數組;
添加讀取開關量輸出功能塊
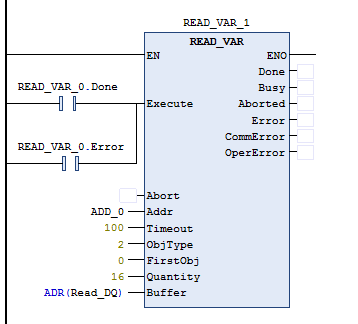
READ_VAR_1釋義:
READ_VAR_0.Done和READ_VAR_0.Error:為READ_VAR功能塊的完成和錯誤信號,用于觸發本功能塊,并與其它功能塊形成輪循;
Addr:為ADDM功能塊轉換后的IP地址;
objType:為功能碼,2表示開關量輸出信號;
FirstObj:表示要讀取的開關量輸出的第1個地址;
Quantity:表示要讀取的開關量輸出的數量;
Buffer:表示客戶機的緩存地址,數量類型為Word型數組;
添加寫入開關量輸出功能塊
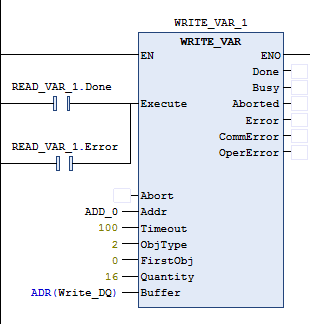
RITE_VAR_1釋義:
READ_VAR_1.Done和READ_VAR_1.Error:為READ_VAR功能塊的完成和錯誤信號,用于觸發本功能塊,并與其它功能塊形成輪循;
Addr:為ADDM功能塊轉換后的IP地址;
objType:為功能碼,2表示開關量輸出信號;
FirstObj:表示要寫入的開關量輸出的第1個地址;
Quantity:表示要寫入的開關量輸出的數量;
Buffer:表示客戶機的緩存地址,數量類型為Word型數組;
添加寫入模擬量輸出功能塊
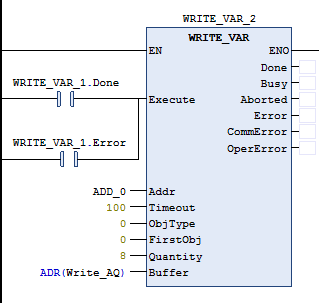
WITE_VAR_2釋義:
WRITE_VAR_1.Done和WRITE _VAR_1.Error:為WRITE_VAR功能塊的完成和錯誤信號,用于觸發本功能塊,并與其它功能塊形成輪循;
Addr:為ADDM功能塊轉換后的IP地址;
objType:為功能碼,0表示模擬量輸出信號;
FirstObj:表示要寫入的模擬量輸出的第1個地址;
Quantity:表示要寫入的模擬量輸出的數量;
Buffer:表示客戶機的緩存地址,數量類型為Word型數組;
添加讀取模擬量輸入功能塊
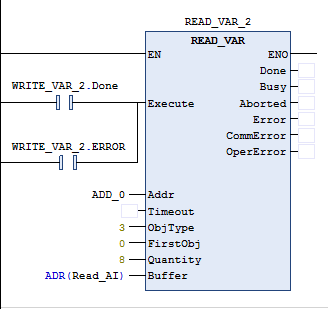
READ_VAR_2釋義:
WRITE_VAR_2.Done和WRITE _VAR_2.Error:為WRITE_VAR功能塊的完成和錯誤信號,用于觸發本功能塊,并與其它功能塊形成輪循;
Addr:為ADDM功能塊轉換后的IP地址;
objType:為功能碼,0表示模擬量輸入信號;
FirstObj:表示要讀取的模擬量輸入的第1個地址;
Quantity:表示要讀取的模擬量輸入的數量;
Buffer:表示客戶機的緩存地址,數量類型為Word型數組;
四、組態測試
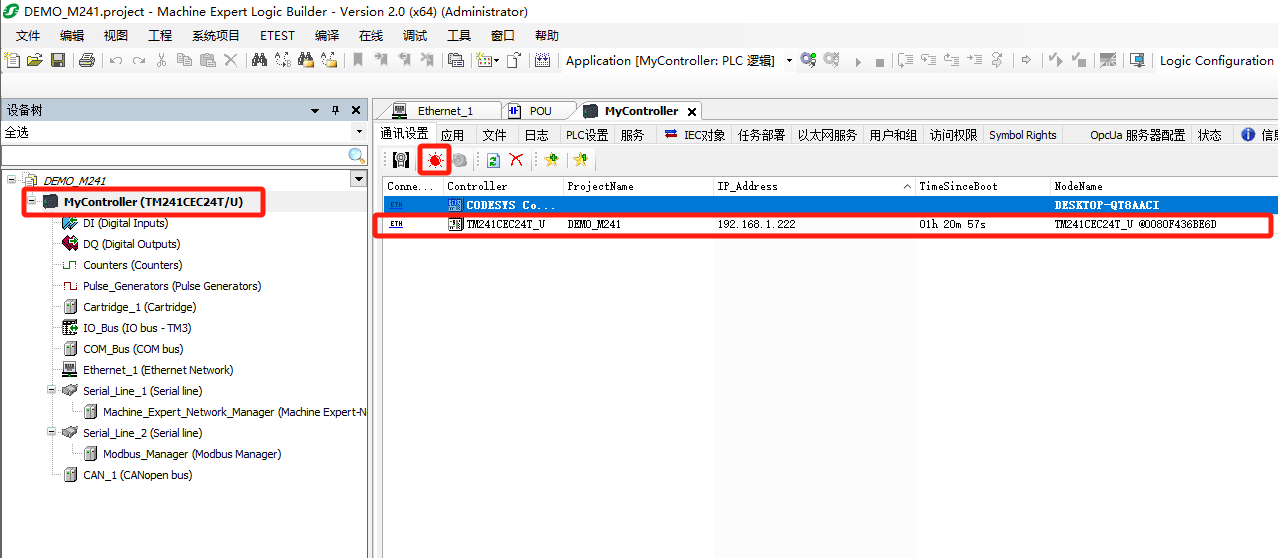
搜索CPU
切換至設備樹,雙擊CPU,點擊更新,可搜索到已連接的CPU如下圖所示
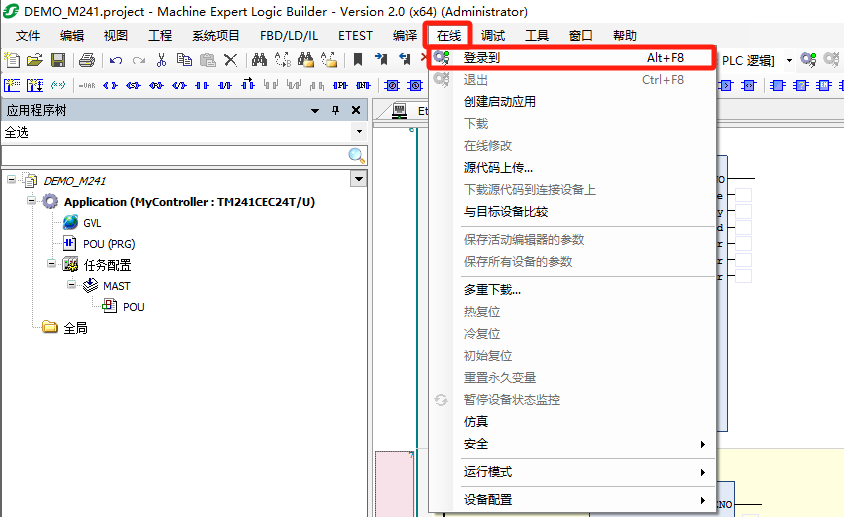
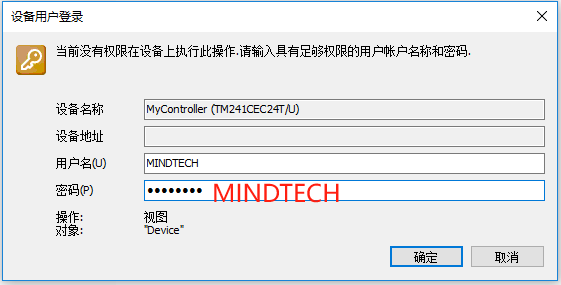
登錄CPU
點擊菜單欄中的在線,在下拉菜單中點擊登錄到
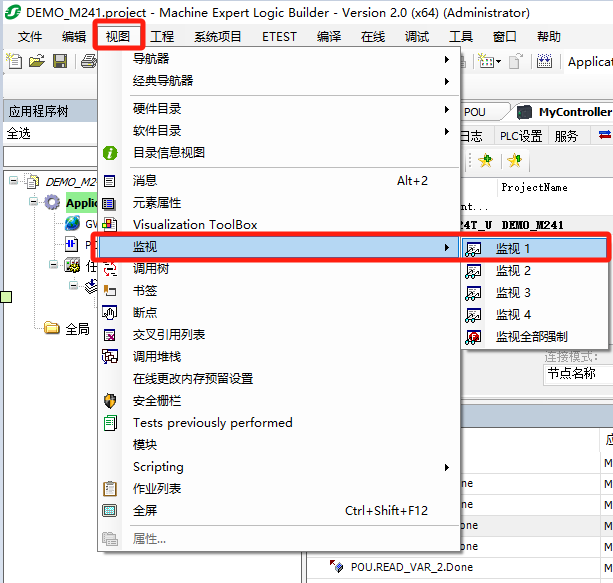
建立監控表
點擊菜單欄中的視圖→監視→監視1,將觸發變量及需要監控的變量添加進監控表,如下圖所示。
啟動并監控程序
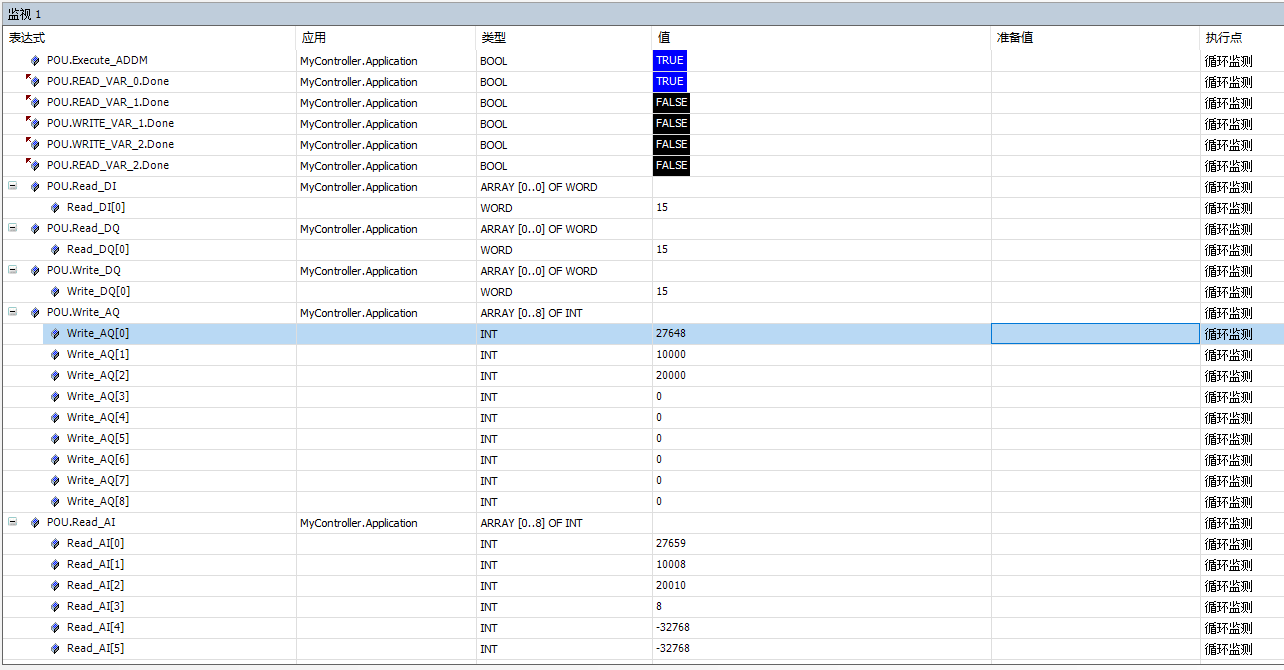
將Execute_ADDM賦值為1,啟動Modbus TCP通過程序塊讀寫主站功能,觀察READ_VAR_0.Done、READ_VAR_1.Done、READ_VAR_2.Done、WRITE_VAR_1.Done、WRITE_VAR_2.Done是否循環為1,如果循環為1,表明輪循成功。
通過控制開關量輸出模塊的通道,設定模擬量輸出模塊的通道,觀察對應的開關量輸入通道及模擬量輸入通道的值是否與輸出一致即可判斷測試是否正常。
通過觀察上圖表明,模塊測試正常。
審核編輯 黃宇
-
plc
+關注
關注
5051文章
14602瀏覽量
487056 -
組態
+關注
關注
0文章
192瀏覽量
15833
發布評論請先 登錄
EVAL-M1-IM241評估板:電機驅動應用的理想之選
智子科技發布數字營銷策略大模型智小虎V2.0
MR30分布式IO在自動上料機的應用

MR30系列分布式I/O在造型機產線的應用



如何用EtherNet/IP網關實現Superisys RFID與施耐德PLC的無縫通訊?
華為推出人工智能氣象預報模型V2.0版本
使用env v2.0執行scons --dist產生缺失依賴報錯怎么解決?
MR30分布式I/O模塊在化工行業的應用
中微半導產品選型手冊2025年V2.0版
MR30分布式I/O模塊在涂裝產線中的應用
Robrain V2.0正式登場:落地人形機器人,引爆智能進化革命

請問是否可以將 Nu-Link2-Me V1.0 的固件升級到 V2.0?
智嵌云V2.0獲軟件著作權登記,賦能行業數字化升級




 工商網監
工商網監
評論