 RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!

一、產品簡介
國產高性能處理器
64 位 4 核低功耗
2.0 GHz超高主頻
1T 超高算力 NPU






二、實驗目的
1、了解語音控制模塊的使用方法;
2、掌握基于語音控制實現機械臂特定動作的方法。

三、實驗原理
程序功能
通過語音控制機械臂實現特定復雜動作:
機械臂疊羅漢
機械臂跳舞
機械臂夾方塊
機械臂搬運

語音控制模塊
如圖示為語音控制模塊的實物圖和原理圖,模塊是基于CI122芯片。


語音控制模塊是基于啟英泰倫CI122模組的,CI112X 芯片具有較強的CPU運算能力,支持硬件NN加速,以及充足的RAM。能夠完成一些常見的語音處理算法。主要包含了ASR(語音識別)和語音降噪功能。
語音識別,一般簡稱ASR,是將聲音轉化為文字的過程。CI112X系列芯片中,CI1122支持50 ~ 80條語音指令。
降噪(DENOISE)算法能有效抑制穩態噪聲,在保證語音失真度的同時具有良好的噪聲抑制效果。開啟該功能后,可以通過降低穩態噪聲的方式進行識別效果的提升,但是同時該功能會消耗24KB的芯片內部存儲空間,并且會消耗CPU的帶寬資源。
四、實驗設備
實驗軟件
本實驗中使用的軟件為.VMware17+Ubuntu18.04.4 和串口調試工具Xshell。


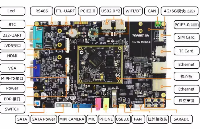
實驗硬件
本實驗中使用的是TL3568-PlusTEB實驗箱,所需的配件為Micro SD卡、Type-C線、電源、語音控制模塊、網線和機械臂套件。


五、實驗步驟
硬件連接
(1)將Ubuntu系統啟動卡插至Micro SD卡槽。
(2)使用Type-C線連接USB TO UART2調試串口到PC機。
(3)將實驗箱ETH0 RGMII網口(COM21)通過網線連接至路由器。
(4)將語音控制模塊插入實驗箱的GPIO/PWM/SPI/UART/CAN 拓展接口。
(5)連接實驗箱電源,先不要上電。
(6)實驗擺放位置按照黃色區域放置黃色積木塊,紅色區域放置紅色積木塊,綠色區域放置綠色積木塊,藍色區域放置藍色積木塊。
(7)將機械臂的攝像頭連接到實驗箱的USB2.0 HOST。
(8)使用MIcro USB線連接機械臂的USB口和實驗箱的USB2.0 HOST。
(9)連接機械臂的電源,上電。

軟件操作
(1)先在設備管理器查看串口的端口號;
(2)再設置串口調試工具,波特率設置為1500000,點擊連接,在Xshell調試終端會顯示連接成功。
(3)連接成功后,撥動實驗箱的電源開關,將實驗箱上電。
(4)系統啟動成功后,輸入賬戶密碼登錄即可(賬密均為:tronlong)
(5)登錄成功后,查詢實驗箱的網口地址。

拷貝文件
我們先打開Ubuntu,將Demo文件夾拷貝到RK3568目錄下。
"Ctrl+Alt+T"打開控制臺,執行命令將文件拷貝至實驗箱文件系統(根據實驗箱實際IP地址修改命令)。

運行程序
在串口調試窗口執行命令,啟動開發環境
在網頁輸入地址,即可打開登錄界面 (根據實際IP地址修改網頁地址)。
輸入密碼:tronlong,登錄。
在程序目錄,雙擊打開程序,點擊重新運行程序。
程序運行后,通過語音控制機械臂實現特定復雜動作,包括:機械臂疊羅漢、跳舞、夾方塊、搬運。具體語音控制詞匯如下:
?喚醒詞:你好創龍。
?控制機械臂模擬跳舞:機械臂跳舞。
?控制機械臂夾取方塊:機械臂夾方塊。
?控制機械臂開始把積木塊堆疊起來:機械臂疊羅漢。
?控制機械臂搬運:機械臂搬運。
例如,先說:你好創龍,語音模塊會回應:有什么可以幫您?接著說:機械臂跳舞,機械臂會模擬跳舞,同時語音模塊會回應:開始跳舞。

夾方塊、疊羅漢、搬運前需提前布置好方塊的位置。
機械臂夾方塊:在中間區域每次放一個方塊,機械臂按照黃色-紅色-綠色-藍色的位置順序從中間往周圍放

機械臂疊羅漢:按照黃色-紅色-綠色-藍色的順序堆疊。

機械臂搬運:將堆疊好的四個方塊按照黃色-紅色-綠色-藍色的位置順序從中間往周圍搬運。

這是一條分割線
-
人工智能
+關注
關注
1817文章
50098瀏覽量
265381 -
機械臂
+關注
關注
14文章
596瀏覽量
26125 -
RK3568
+關注
關注
5文章
644瀏覽量
7943
發布評論請先 登錄

【迅為工業RK3568穩定可靠】itop-3568開發板Linux驅動開發實戰:RK3568內核模塊符號導出詳解

【迅為工業RK3568穩定可靠】itop-3568開發板驅動開發第4章驅動模塊傳參實驗

迅為iTOP-RK3568人工智能開發板mobilenet圖像分類模型推理測試





 工商網監
工商網監
評論