") 定位 AGV搬運(yùn)機(jī)器人是如何判斷貨物位置的?
定位 AGV搬運(yùn)機(jī)器人是如何判斷貨物位置的?

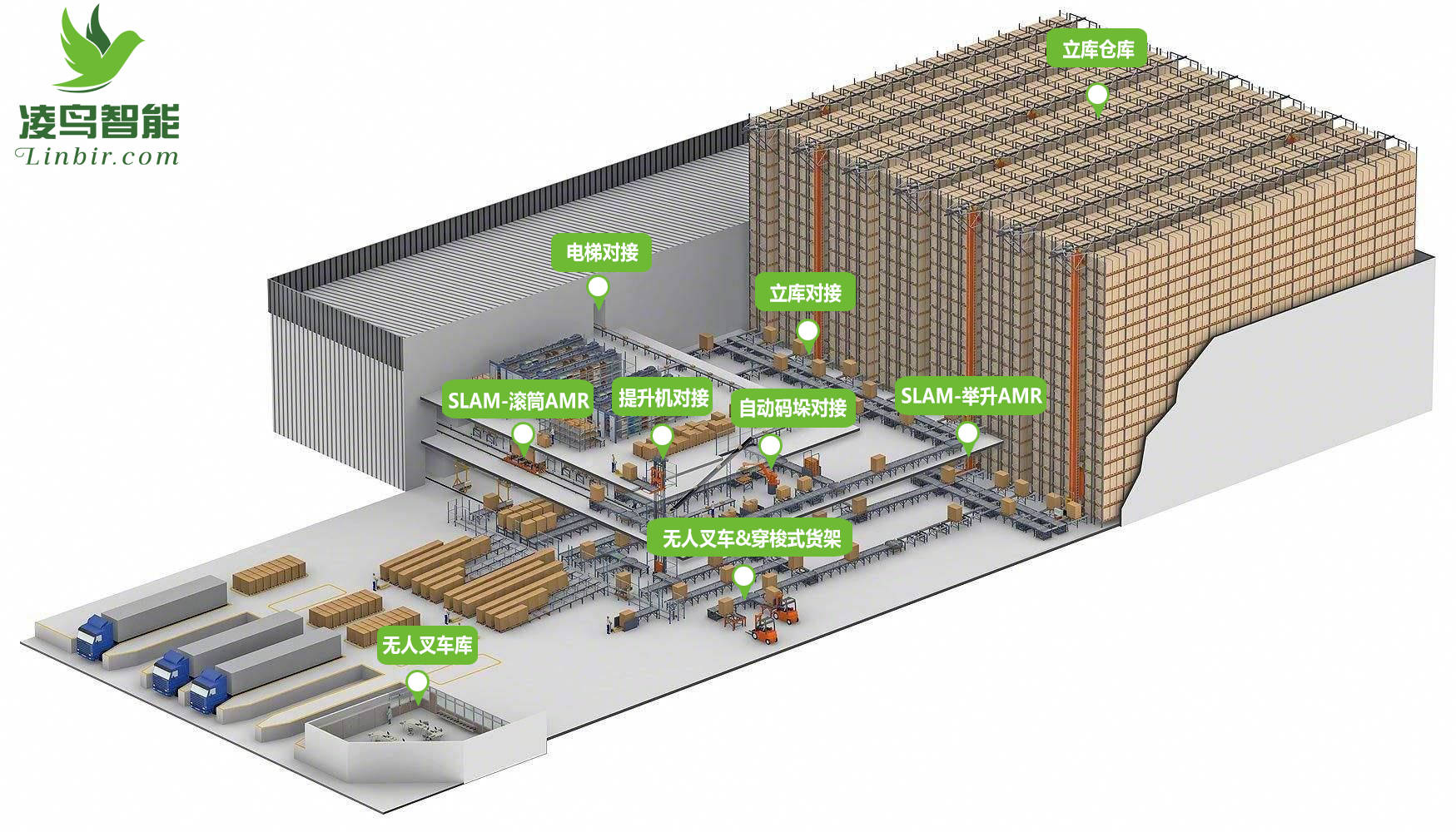
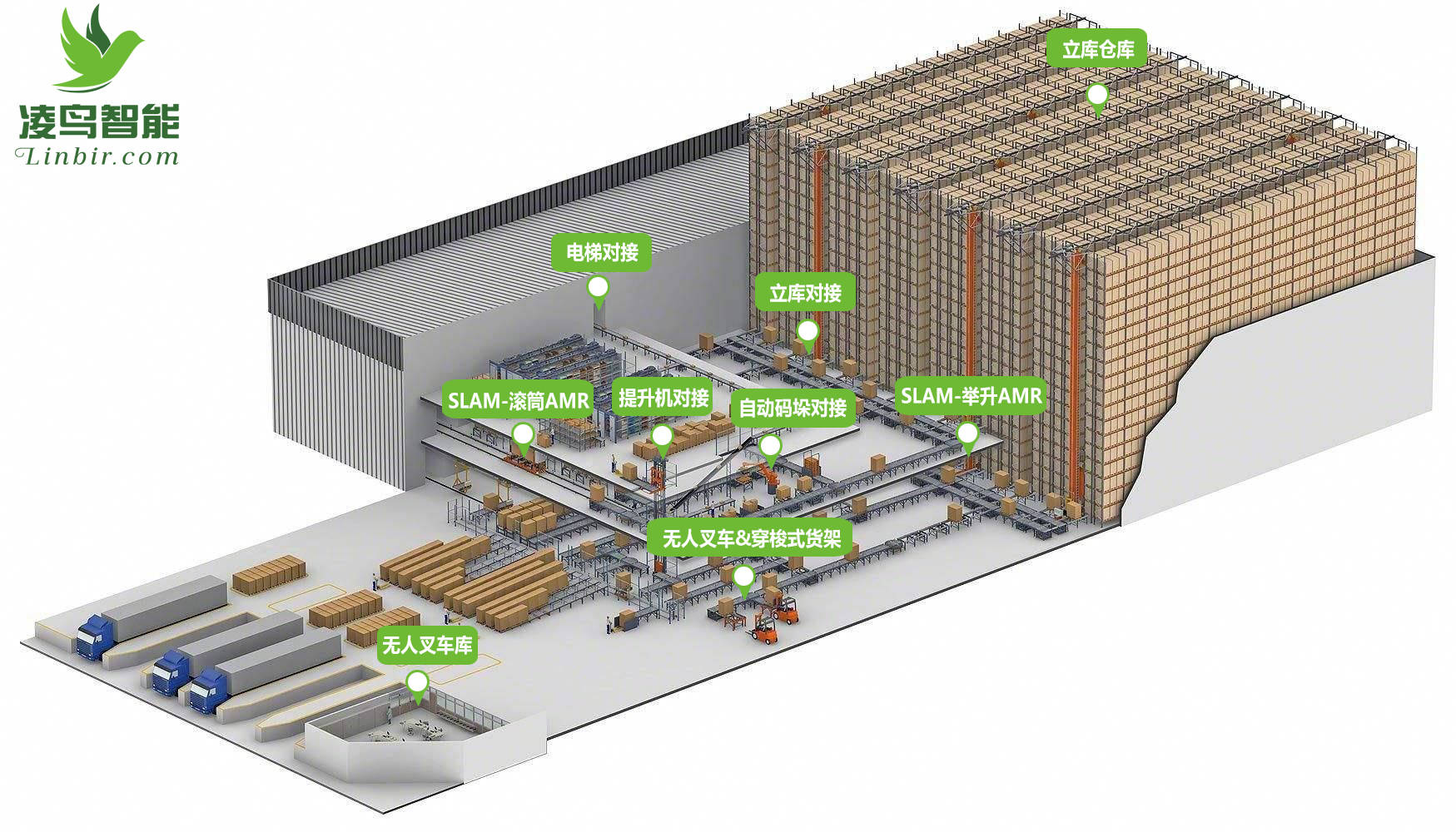
談到智能工廠就不得不說智能物流,AGV小車作為智能物流的重要設(shè)備,是鏈接智能生產(chǎn)、智能工廠、智能物流的重要紐帶。隨著AGV技術(shù)的發(fā)展,無需任何輔助定位標(biāo)志的無軌激光AGV移動(dòng)機(jī)器人應(yīng)運(yùn)而生,使AGV的靈活性和柔性發(fā)揮到最大。無軌激光AGV移動(dòng)機(jī)器人定位是實(shí)現(xiàn)自主導(dǎo)航的關(guān)鍵,無軌激光AGV通過各種傳感器件感知周圍環(huán)境,獲取自身位置信息,從而自主進(jìn)行規(guī)劃、調(diào)整運(yùn)行路徑。
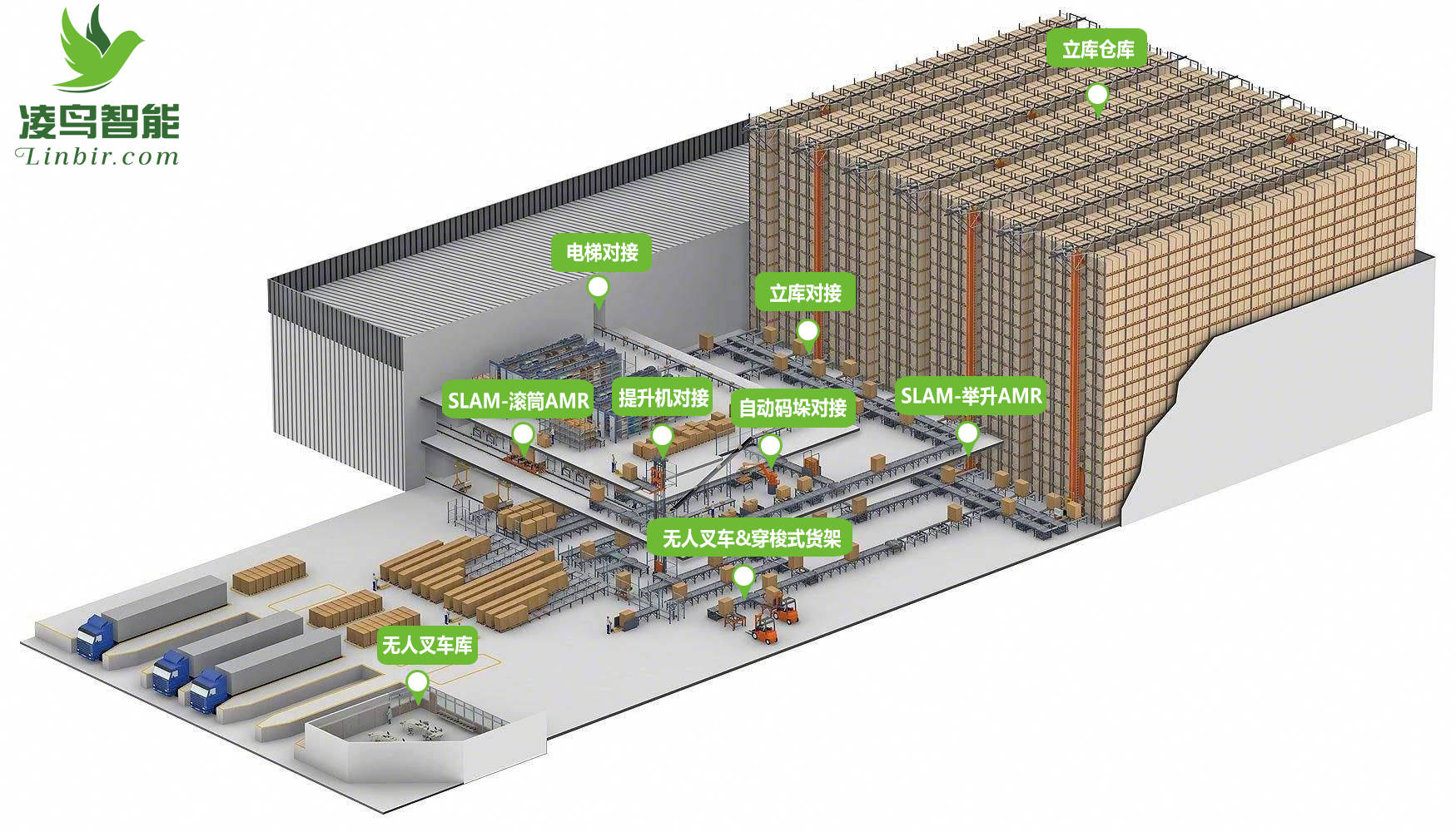
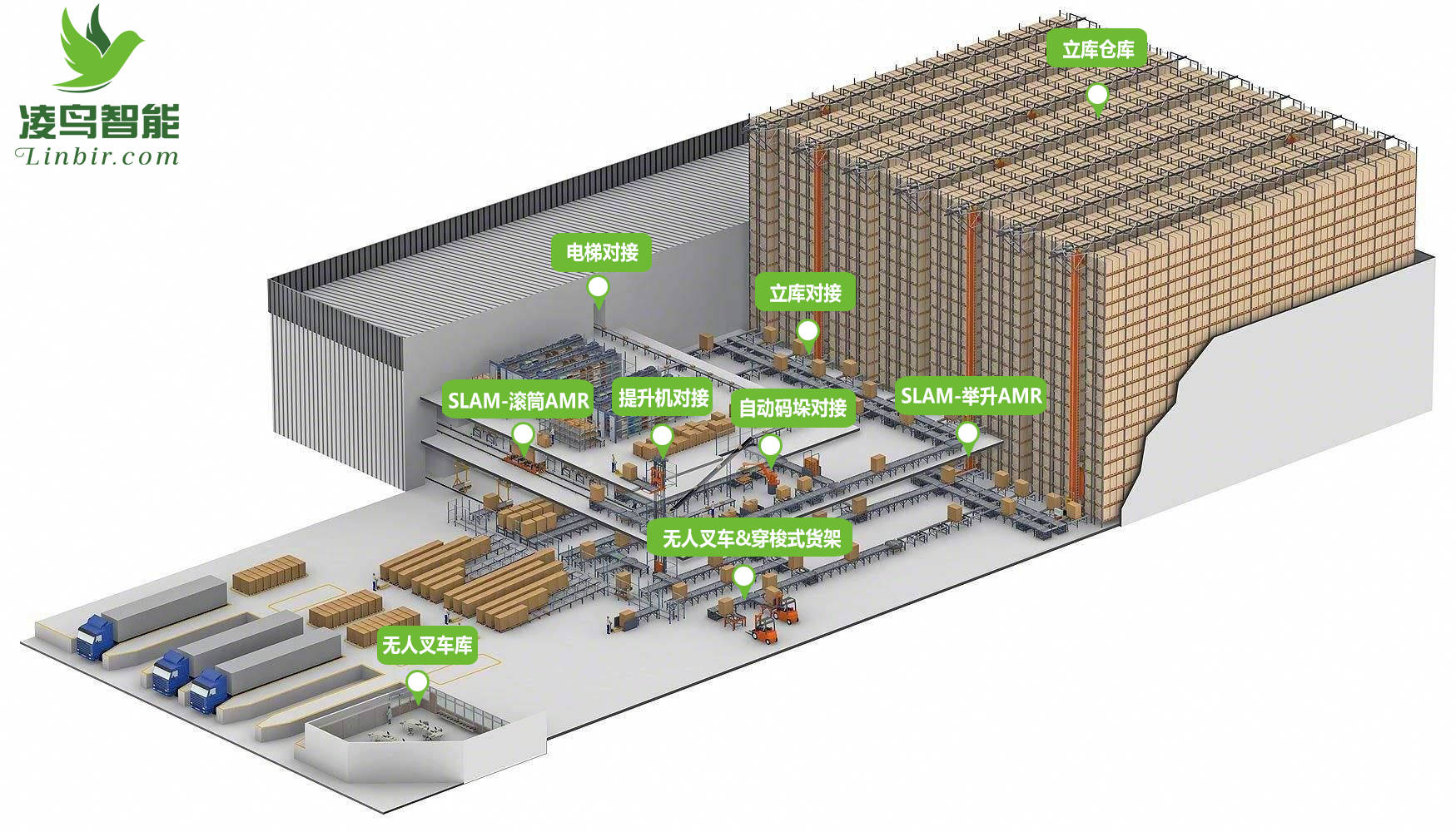
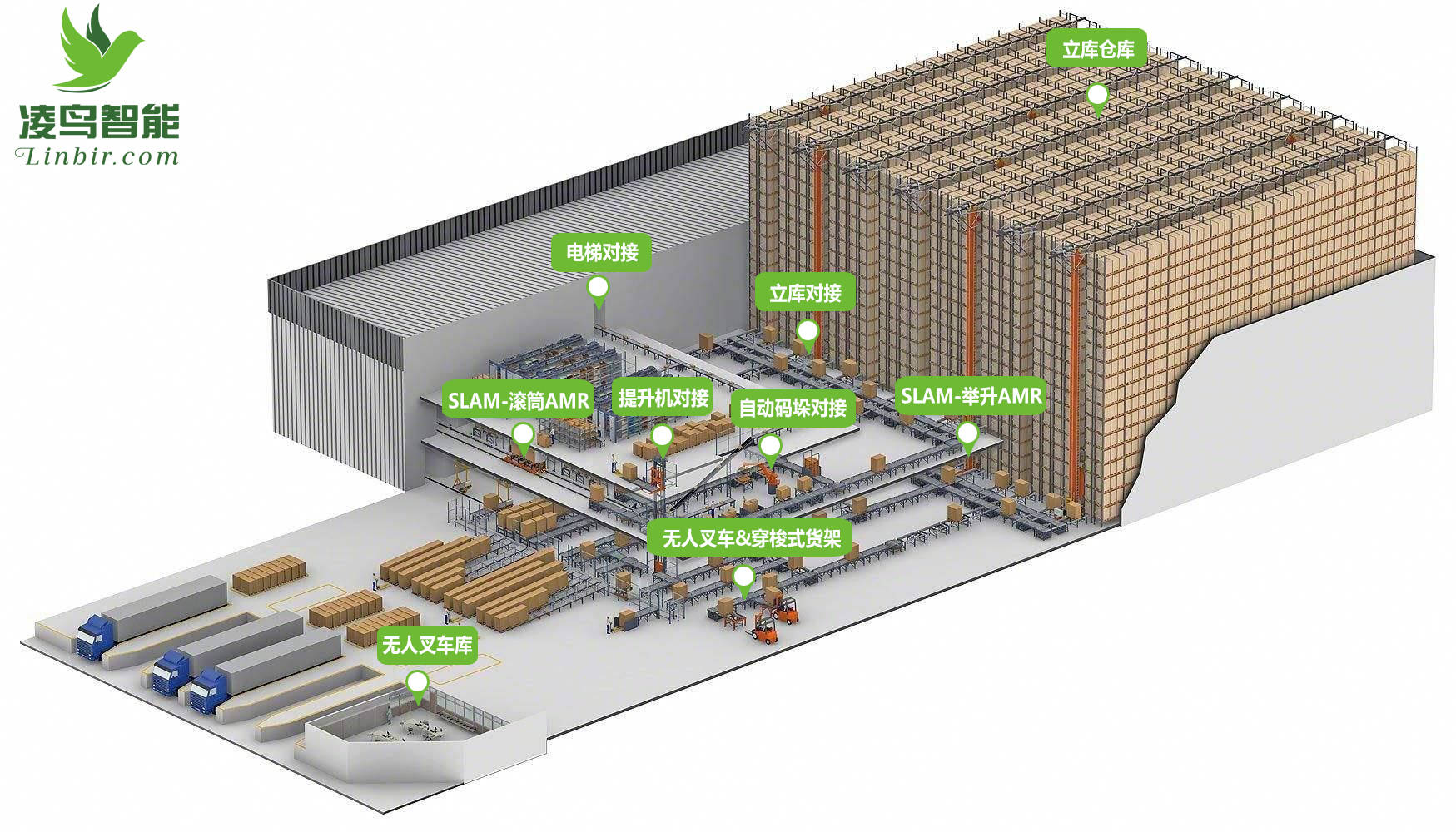
AGV倉(cāng)儲(chǔ)物流
AGV(Automated Guided Vehicle)機(jī)器人判斷貨物位置的過程主要依賴于其集成的多種傳感器、導(dǎo)航技術(shù)以及先進(jìn)的控制系統(tǒng)。以下是AGV機(jī)器人判斷貨物位置的主要方法:
激光導(dǎo)航
原理:激光雷達(dá)發(fā)射激光束并接收反射回來的信號(hào),通過測(cè)量從發(fā)射到接收的時(shí)間差計(jì)算出物體的距離,激光雷達(dá)以高頻率旋轉(zhuǎn),獲取周圍環(huán)境的360度二維或三維點(diǎn)云數(shù)據(jù),形成環(huán)境的數(shù)字地圖。
作用:利用SLAM(同步定位與地圖構(gòu)建)技術(shù),AGV在初次運(yùn)行時(shí)通過激光雷達(dá)掃描環(huán)境,創(chuàng)建環(huán)境的初始地圖,在運(yùn)行過程中,激光雷達(dá)持續(xù)掃描環(huán)境,獲取實(shí)時(shí)點(diǎn)云數(shù)據(jù),控制系統(tǒng)將實(shí)時(shí)點(diǎn)云數(shù)據(jù)與預(yù)先構(gòu)建的地圖進(jìn)行匹配,通過算法計(jì)算AGV的當(dāng)前位置和姿態(tài),從而判斷貨物的位置。

激光AGV叉車
視覺導(dǎo)航
原理:利用相機(jī)或攝像頭捕捉周圍環(huán)境的圖像,通過圖像處理技術(shù)和深度學(xué)習(xí)算法識(shí)別物體、路標(biāo)、貨物信息等。
作用:實(shí)現(xiàn)對(duì)周圍環(huán)境的精準(zhǔn)感知,輔助AGV判斷貨物的位置。隨著深度學(xué)習(xí)技術(shù)的發(fā)展,視覺傳感器在AGV中的應(yīng)用越來越廣泛,為實(shí)現(xiàn)更高級(jí)別的智能化提供了可能。
其他導(dǎo)航技術(shù)
如電磁導(dǎo)航、慣性導(dǎo)航、GPS導(dǎo)航、二維碼導(dǎo)航等,這些技術(shù)也可以為AGV提供定位信息,但可能在精度、穩(wěn)定性或適用性方面有所不同。

不銹鋼AGV
距離傳感器
類型:如超聲波傳感器、紅外傳感器等。
作用:實(shí)時(shí)監(jiān)測(cè)AGV與貨物之間的距離,確保AGV以恰當(dāng)?shù)乃俣群土Χ冉咏浳铩?/p>
光電傳感器
原理:由光電對(duì)管組成,當(dāng)AGV到達(dá)目的地后,擋住紅外線,促使車輛發(fā)出控制信號(hào)。
作用:實(shí)現(xiàn)高精度的定位,幫助AGV準(zhǔn)確地對(duì)準(zhǔn)貨物位置。

AGV無人叉車
智能控制系統(tǒng)
接收來自傳感器和導(dǎo)航系統(tǒng)的信息,對(duì)AGV的動(dòng)作進(jìn)行精確調(diào)控。
通過復(fù)雜的算法和程序,根據(jù)實(shí)際情況快速做出決策,調(diào)整AGV的行駛速度、取放力度等參數(shù)。
路徑規(guī)劃與避障算法
接收來自傳感器和導(dǎo)航系統(tǒng)的信息,對(duì)AGV的動(dòng)作進(jìn)行精確調(diào)控。
實(shí)時(shí)檢測(cè)前方障礙物,并計(jì)算避障路徑,避免碰撞。
工作環(huán)境優(yōu)化
保持地面平整、減少雜物干擾等,以提高AGV判斷貨物位置的準(zhǔn)確性。
貨物標(biāo)識(shí)
在貨物上或周圍設(shè)置標(biāo)識(shí)(如二維碼、條形碼等),以便AGV能夠快速識(shí)別并定位貨物。

AGV進(jìn)電梯
然而,不管那種定位技術(shù)都沒有辦法解決所有問題,因此需要多種定位技術(shù)組合,來實(shí)現(xiàn)優(yōu)勢(shì)互補(bǔ)。激光AGV移動(dòng)機(jī)器人定位采用先進(jìn)的SLAM即時(shí)定位與地圖構(gòu)建技術(shù),AGV機(jī)器人從未知環(huán)境的未知地點(diǎn)出發(fā),在運(yùn)動(dòng)過程中通過重復(fù)觀測(cè)到的環(huán)境特征定位自身位置和姿態(tài),再根據(jù)自身位置構(gòu)建周圍環(huán)境的增量式地圖,從而達(dá)到同時(shí)定位和地圖構(gòu)建的目的。
審核編輯 黃宇
-
AGV
+關(guān)注
關(guān)注
28文章
1554瀏覽量
43684 -
搬運(yùn)機(jī)器人
+關(guān)注
關(guān)注
0文章
79瀏覽量
13019
發(fā)布評(píng)論請(qǐng)先 登錄
晶圓搬運(yùn)機(jī)器人搭配Aligner尋邊器,能提升定位傳輸效率嗎?
上銀晶圓搬運(yùn)機(jī)器人的重復(fù)定位精度能否滿足半導(dǎo)體高精度傳輸要求?
AGV機(jī)器人如何提升搬運(yùn)效率?
AGV機(jī)器人如何精準(zhǔn)識(shí)別庫位有無貨物?
高效搬運(yùn)+靈活轉(zhuǎn)向:AGV機(jī)器人,智能物流的極簡(jiǎn)解決方案!

【案例分享】電子谷多芯線束賦能高效產(chǎn)線!AGV 搬運(yùn)機(jī)器人穩(wěn)定連接方案

復(fù)合機(jī)器人對(duì)比傳統(tǒng)AGV和機(jī)械臂的優(yōu)勢(shì)何在?

高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動(dòng)控制方案
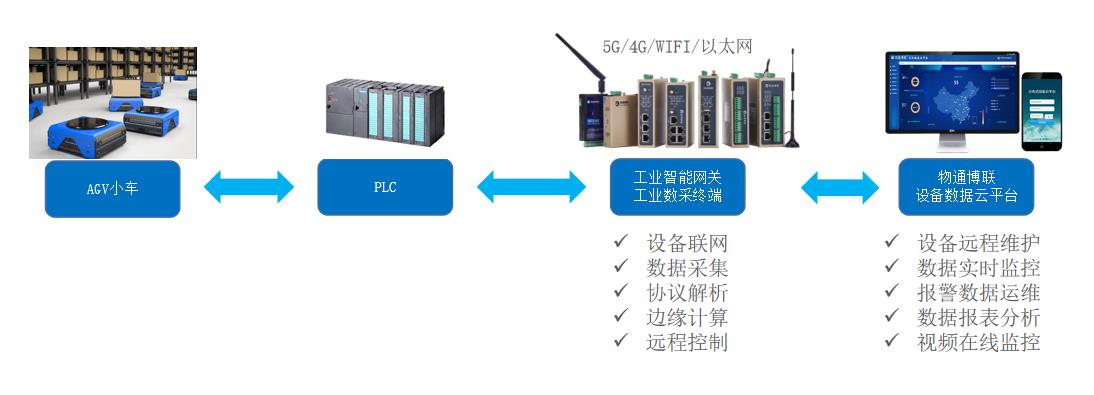
AGV搬運(yùn)機(jī)器人聯(lián)網(wǎng)監(jiān)控系統(tǒng)方案
復(fù)合機(jī)器人開啟血漿包“零接觸”搬運(yùn)新時(shí)代

AGV搬運(yùn)機(jī)器人負(fù)載場(chǎng)景選型建議
對(duì)比AGV和協(xié)作臂,為什么要選擇復(fù)合機(jī)器人?有哪些場(chǎng)景和優(yōu)勢(shì)

工業(yè)機(jī)器人的特點(diǎn)
詳細(xì)介紹機(jī)場(chǎng)智能指路機(jī)器人的工作原理
AGV搬運(yùn)機(jī)器人耗電量因素



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論