") 伺服系統(tǒng)與步進電機的區(qū)別 如何選擇合適的伺服系統(tǒng)
伺服系統(tǒng)與步進電機的區(qū)別 如何選擇合適的伺服系統(tǒng)

在自動化和精密控制領(lǐng)域,電機的選擇至關(guān)重要。伺服系統(tǒng)和步進電機是兩種常見的電機類型,它們各自具有獨特的優(yōu)勢和局限性。
伺服系統(tǒng)與步進電機的基本區(qū)別
1. 控制原理
- 伺服系統(tǒng) :伺服系統(tǒng)是一種閉環(huán)控制系統(tǒng),它通過編碼器反饋實際位置信息,控制器根據(jù)偏差調(diào)整電機的運動,以實現(xiàn)精確控制。
- 步進電機 :步進電機是一種開環(huán)控制系統(tǒng),它通過接收脈沖信號來控制步進角度,不依賴于反饋信號。
2. 精度
- 伺服系統(tǒng) :伺服系統(tǒng)能夠提供極高的位置精度和速度精度,適合需要精確控制的應(yīng)用。
- 步進電機 :步進電機的精度較低,但可以通過細(xì)分技術(shù)提高,但仍然不如伺服系統(tǒng)。
3. 響應(yīng)速度
- 伺服系統(tǒng) :伺服系統(tǒng)響應(yīng)速度快,能夠快速啟動和停止,適合高速應(yīng)用。
- 步進電機 :步進電機響應(yīng)速度較慢,不適合高速應(yīng)用。
4. 力矩
- 伺服系統(tǒng) :伺服電機通常具有較高的力矩,適合需要較大力矩輸出的應(yīng)用。
- 步進電機 :步進電機的力矩相對較低,但在低速時可以提供較大的力矩。
5. 噪音和振動
- 伺服系統(tǒng) :伺服系統(tǒng)運行平穩(wěn),噪音和振動較小。
- 步進電機 :步進電機在運行時可能會產(chǎn)生較大的噪音和振動。
6. 成本
- 伺服系統(tǒng) :伺服系統(tǒng)的成本通常高于步進電機,包括電機、驅(qū)動器和編碼器。
- 步進電機 :步進電機成本較低,適合預(yù)算有限的應(yīng)用。
如何選擇合適的伺服系統(tǒng)
選擇合適的伺服系統(tǒng)需要考慮以下幾個因素:
1. 應(yīng)用需求
- 精度要求 :如果應(yīng)用需要高精度控制,伺服系統(tǒng)是更好的選擇。
- 速度要求 :對于高速應(yīng)用,伺服系統(tǒng)的快速響應(yīng)能力是必要的。
- 力矩要求 :如果需要較大的力矩輸出,伺服電機更為合適。
2. 經(jīng)濟性
- 成本預(yù)算 :如果預(yù)算有限,可以考慮使用步進電機,或者選擇成本效益較高的伺服系統(tǒng)。
- 維護成本 :伺服系統(tǒng)的維護成本通常高于步進電機,需要考慮長期的運營成本。
3. 環(huán)境因素
- 溫度和濕度 :伺服系統(tǒng)和步進電機對環(huán)境的適應(yīng)性不同,需要根據(jù)實際工作環(huán)境選擇合適的電機。
- 空間限制 :如果空間有限,需要選擇體積小、重量輕的電機。
4. 系統(tǒng)集成
- 控制器兼容性 :確保伺服系統(tǒng)能夠與現(xiàn)有的控制系統(tǒng)兼容。
- 編碼器類型 :根據(jù)應(yīng)用需求選擇合適的編碼器類型,如增量式或絕對式。
5. 技術(shù)支持和服務(wù)
- 供應(yīng)商支持 :選擇有良好技術(shù)支持和售后服務(wù)的供應(yīng)商。
- 培訓(xùn)和文檔 :確保有足夠的培訓(xùn)和文檔支持,以便快速上手和解決問題。
結(jié)論
伺服系統(tǒng)和步進電機各有優(yōu)勢,選擇時需要根據(jù)具體的應(yīng)用需求、成本預(yù)算、環(huán)境因素和系統(tǒng)集成考慮。通過綜合評估這些因素,可以為特定的應(yīng)用場景選擇最合適的電機系統(tǒng)。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6930瀏覽量
113911 -
編碼器
+關(guān)注
關(guān)注
45文章
3943瀏覽量
142247 -
步進電機
+關(guān)注
關(guān)注
153文章
3236瀏覽量
152000 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
601瀏覽量
41696 -
反饋信號
+關(guān)注
關(guān)注
0文章
32瀏覽量
8433
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
一文解析伺服系統(tǒng)CN1接口的DI/DO端子功能
本文詳細(xì)深入的介紹了伺服系統(tǒng)CN1接口的DI(數(shù)字量輸入)和DO(數(shù)字量輸出)端子功能定義、邏輯選擇原理、硬件接線規(guī)范,明確了各端子的功能分類、參數(shù)關(guān)聯(lián)及典型應(yīng)用場景,重點辨析了易混淆功能的核心差異

ADI Trinamic如何讓伺服系統(tǒng)開發(fā)化繁為簡
“剛搞定FOC算法調(diào)試,又卡在編碼器協(xié)議解碼;好不容易湊齊分立器件,卻發(fā)現(xiàn)系統(tǒng)功耗超標(biāo)”——這大概是不少伺服系統(tǒng)開發(fā)者的日常。隨著設(shè)備中的電機數(shù)量日漸增多,傳統(tǒng)開發(fā)模式下的硬件堆疊、軟件繁瑣、調(diào)試

步進伺服電機的六大問題處理技巧
案例,幫助技術(shù)人員快速定位和解決問題。 ? 一、電機振動與噪音異常 振動和噪音是步進伺服系統(tǒng)最常見的故障征兆。某包裝生產(chǎn)線曾出現(xiàn)電機運行時伴隨尖銳嘯叫,經(jīng)檢測發(fā)現(xiàn)共振頻率與機械結(jié)構(gòu)固有

MT6816磁編碼器的伺服系統(tǒng)小型化與高性價比設(shè)計
,正逐漸成為伺服系統(tǒng)設(shè)計中的熱門選擇。本文將深入探討基于MT6816磁編碼器的伺服系統(tǒng)小型化與高性價比設(shè)計的關(guān)鍵技術(shù)和方法。

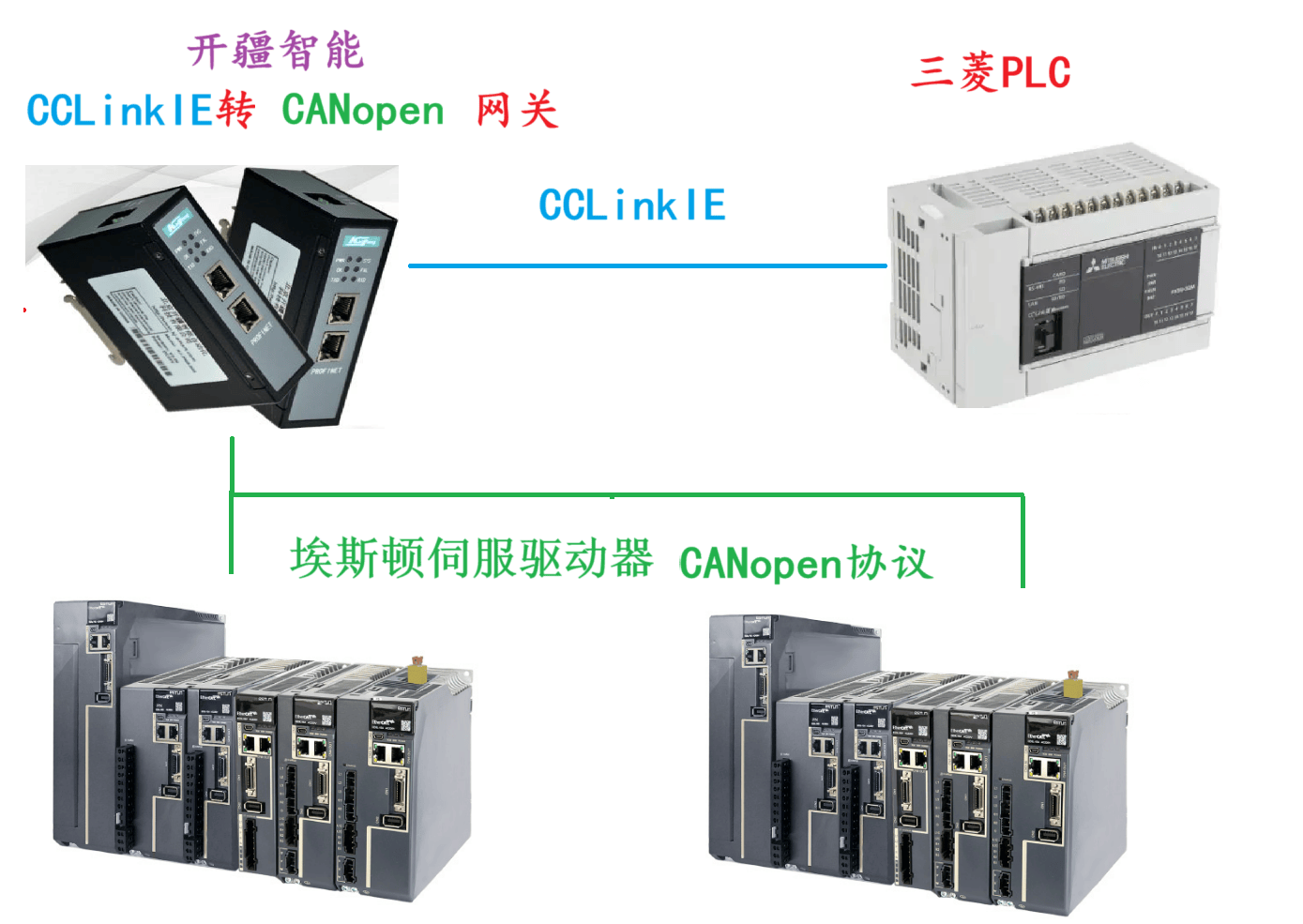
開疆智能CANopen轉(zhuǎn)CCLinkIE網(wǎng)關(guān)連接埃斯頓伺服系統(tǒng)配置案例
本案例是三菱PLC通過CCLinkIE轉(zhuǎn)CANopen網(wǎng)關(guān)控制埃斯頓伺服系統(tǒng)的配置案例。
伺服系統(tǒng)和單片機有什么區(qū)別
伺服系統(tǒng)和單片機是兩類完全不同的技術(shù),主要區(qū)別體現(xiàn)在功能定位、工作原理、應(yīng)用場景等方面。
網(wǎng)絡(luò)化多電機伺服系統(tǒng)監(jiān)控終端設(shè)計
在多電機伺服系統(tǒng)的調(diào)試及使用過程中,需要實時獲取系統(tǒng)運行時各個電機和負(fù)載的運行狀態(tài)數(shù)據(jù),并通過對相應(yīng)數(shù)據(jù)的分析進行控制器參數(shù)的整定和故障判斷。而在傳統(tǒng)的基于CAN總線的多
發(fā)表于 06-23 07:15
伺服系統(tǒng)和PLC各自在什么場合使用
、銑削、鉆孔等高精度加工。 案例 :伺服系統(tǒng)控制刀具的精確移動,實現(xiàn)±0.001mm的加工精度。 機器人關(guān)節(jié)控制 場景 :工業(yè)機器人、協(xié)作機器人(如焊接、裝配、搬運)。 案例 :伺服電機驅(qū)動機器人手臂的旋轉(zhuǎn)和伸縮,確保動作精準(zhǔn)、
伺服系統(tǒng)和PLC有哪些共同點和區(qū)別
伺服系統(tǒng)和PLC在工業(yè)自動化中都是重要組成部分,二者存在一定共同點,但區(qū)別更為明顯,以下為你詳細(xì)介紹: 共同點 應(yīng)用領(lǐng)域關(guān)聯(lián):二者都廣泛應(yīng)用于工業(yè)自動化領(lǐng)域,在制造業(yè)、物流、機器人等行業(yè)發(fā)揮
TMR的MT9523傳感芯片在工業(yè)伺服系統(tǒng)動態(tài)精度補償中應(yīng)用
在工業(yè)自動化領(lǐng)域,伺服系統(tǒng)的動態(tài)精度直接決定了設(shè)備性能的上限。隨著工業(yè)4.0時代的深入發(fā)展,傳統(tǒng)的光電編碼器和磁編碼器在高速、高精度場景中逐漸暴露出響應(yīng)延遲和抗干擾不足的瓶頸。而基于隧道磁阻效應(yīng)
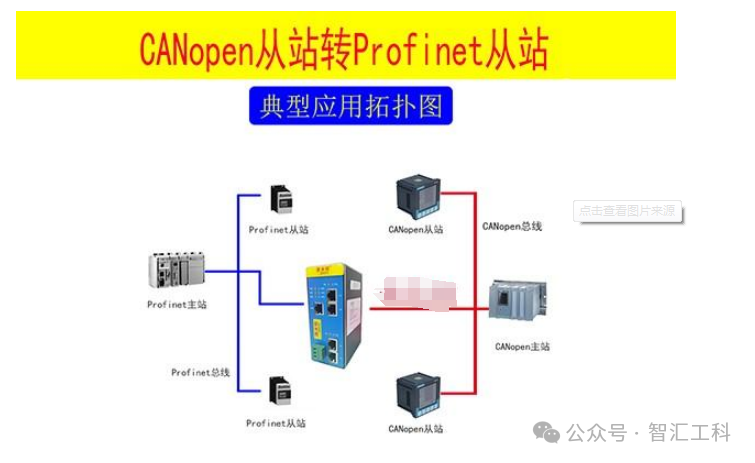
CANOpen轉(zhuǎn)PROFINET網(wǎng)關(guān)連接低壓伺服系統(tǒng)
) ● CANOpen轉(zhuǎn)PROFINET網(wǎng)關(guān)配置軟件 ● 低壓伺服系統(tǒng)的EDS(Electronic Data Sheet)文件 二、配置步驟 1. 安裝GSD文件: ● 選擇由CANOpen轉(zhuǎn)PROFINET網(wǎng)關(guān)
永磁同步電機伺服系統(tǒng)PI參數(shù)整定
在永磁同步電機伺服系統(tǒng)電流、轉(zhuǎn)速控制中,通常采用的 PI 控制器與電流環(huán)、轉(zhuǎn)速環(huán)的穩(wěn)定性和動 態(tài)性能緊密相關(guān) 。通過分析伺服系統(tǒng)的限制條件和參數(shù)特性,論述了電流環(huán)、轉(zhuǎn)速環(huán)控制指標(biāo)的設(shè)定原則,并 提出
發(fā)表于 03-20 12:59
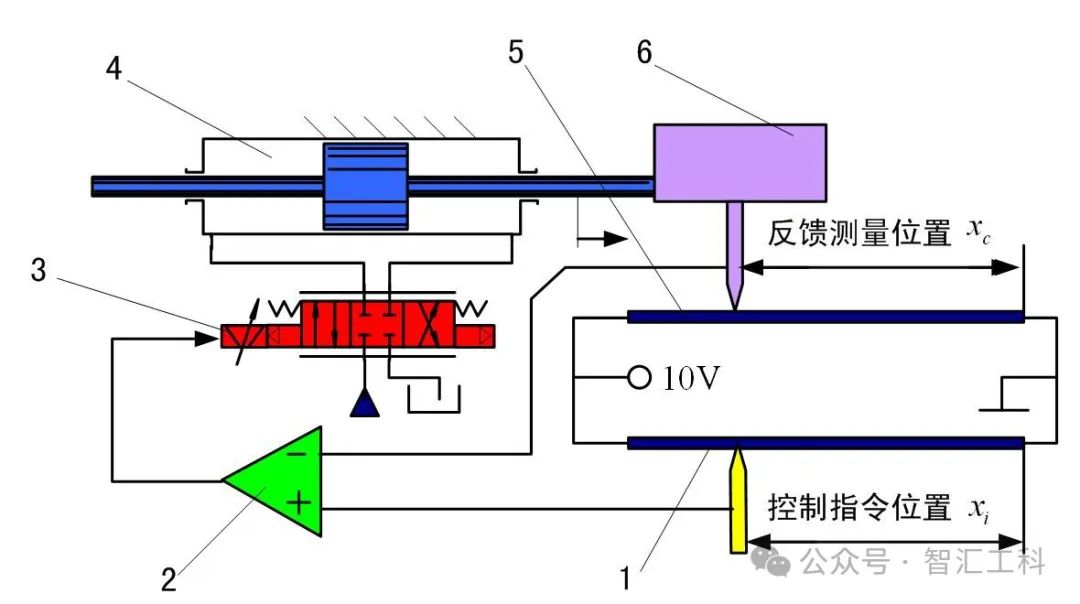
液壓伺服系統(tǒng)工作原理液及優(yōu)缺點
液壓伺服系統(tǒng)是一種通過調(diào)節(jié)液壓元件的流量和壓力來實現(xiàn)對負(fù)載的位置、速度和力的精確控制的系統(tǒng)。以下是對其工作原理及優(yōu)缺點的詳細(xì)分析: 一、工作原理 液壓伺服系統(tǒng)的工作原理主要分為兩個階段:感應(yīng)階段



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論