") 攝像頭捕獲 2D 圖像,深度傳感器拉長距離
攝像頭捕獲 2D 圖像,深度傳感器拉長距離

從自動感應(yīng)水龍頭到AR/VR 頭戴設(shè)備、機(jī)器人和自動駕駛汽車--能夠像人類一樣“看到”周圍世界的產(chǎn)品漸漸變得無處不在。為了制造出能夠“看到”世界的產(chǎn)品,攝像頭傳感器是首選技術(shù)。然而,現(xiàn)實世界是三維的,但單獨(dú)的攝像頭只能捕獲2D 圖像。為了發(fā)揮作用,還需要使他們獲得深度信息。例如:自動感應(yīng)水龍頭需要識別與手的距離、機(jī)器人和自動駕駛汽車需要檢測到與物體的距離以避免碰撞、增強(qiáng)現(xiàn)實體驗需要現(xiàn)實世界場景的3D地圖。
深度傳感技術(shù)可直接測量傳感器與周圍物體之間的距離。在必要時可以與2D圖像數(shù)據(jù)相結(jié)合,使用同步定位與地圖構(gòu)建(SLAM)等技術(shù),建立場景的完整3D圖,獲知場景內(nèi)6個自由度位置.
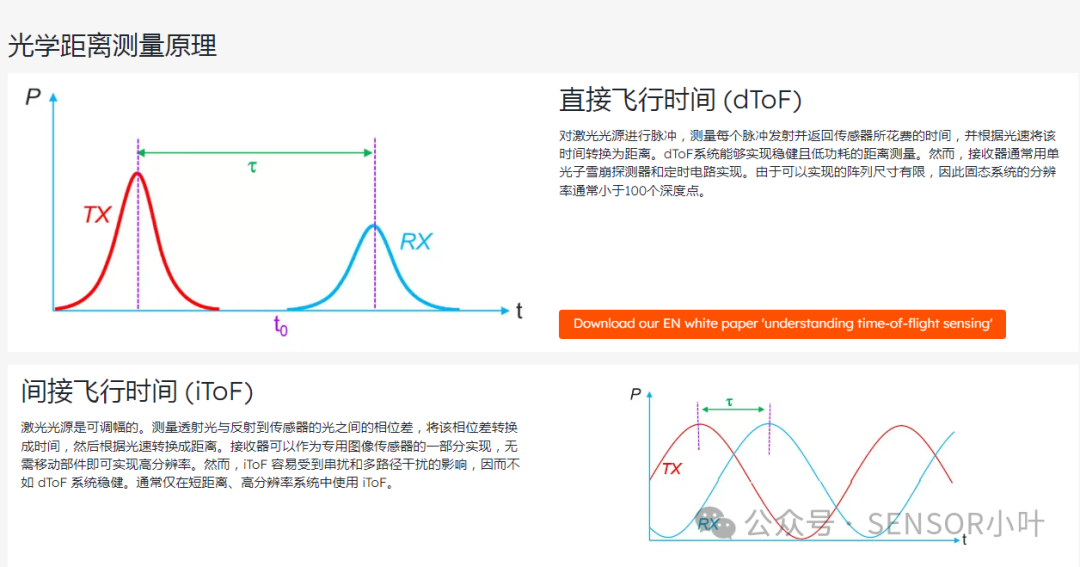
景深傳感器是一種特殊的傳感器,主要用于測量和感知物體或場景在三維空間中的深度信息,即景深。景深傳感器通過特定的技術(shù)手段,能夠獲取物體或場景在三維空間中的距離信息。這種距離信息通常以景深圖的形式呈現(xiàn),景深圖是場景中所有三維點的集合體,每個點代表一個物體或場景中的特定位置,并帶有相應(yīng)的深度信息。景深傳感器的工作原理多種多樣,但主要都是基于測量光線在物體表面反射后回到傳感器的時間或相位差等參數(shù)來計算距離。例如,ToF(Time-of-Flight,飛行時間)傳感器就是一種常見的景深傳感器,它通過主動發(fā)射調(diào)制過的光源到目標(biāo)面上,然后觀察計算反射回來的對應(yīng)光,發(fā)射和反射光之間的相位差通過運(yùn)算和轉(zhuǎn)換得到距離/景深。
VD55H1是一款低噪聲、低功耗的672 x 804像素(0.54兆像素),間接飛行時間 (iToF) 傳感器芯片,采用先進(jìn)的背照式堆疊晶圓技術(shù)制造。結(jié)合940 nm照明系統(tǒng),能夠構(gòu)建小型3D相機(jī),產(chǎn)生高清深度圖,典型測距距離在全分辨率下可達(dá)5 m,并且使用圖案照明可以超過5 m。憑借在200 MHz調(diào)制頻率下運(yùn)行和超過85%的解調(diào)對比度的獨(dú)特能力,該傳感器產(chǎn)生的深度精度是典型100 MHz調(diào)制傳感器的兩倍,而多頻率操作提供了遠(yuǎn)距離測距能力。低功耗的4.6 μm像素實現(xiàn)了先進(jìn)的功耗表現(xiàn),某些模式下平均傳感器功耗降至80 mW以下。VD55H1通過MIPI CSI-2四通道或雙通道接口以1.5 GHz的速度輸出12位RAW數(shù)字視頻數(shù)據(jù)。傳感器幀率在全分辨率下可達(dá)60 fps,在模擬合并2x2下可達(dá)120 fps。意法半導(dǎo)體開發(fā)了專有的軟件圖像信號處理器 (ISP),將RAW數(shù)據(jù)轉(zhuǎn)換為深度圖、幅度圖、置信度圖和偏移圖。也支持Android格式,如DEPTH16和深度點云。 該器件可以通過I2C串行接口進(jìn)行全面配置。具備200 MHz低壓差分信號 (LVDS) 和10 MHz、3線SPI接口,可高度靈活地控制激光驅(qū)動器。傳感器針對低電磁干擾/電磁兼容性、多設(shè)備免疫性和簡易校準(zhǔn)程序進(jìn)行了優(yōu)化。
#GONGNENG#所有功能
超緊湊0.54兆像素iToF傳感器芯片
672 x 804間接飛行時間 (iToF) 傳感器芯片(0.54兆像素)
4.6 μm背照式快速光電二極管像素,1/4英寸光學(xué)格式
4.5 mm x 4.9 mm芯片采用先進(jìn)的40 nm堆疊晶圓技術(shù)制造
實現(xiàn)低功耗、高精度深度圖
像素在200 MHz調(diào)制頻率下具有超過85%的解調(diào)對比度
低噪聲電荷域像素(無kTC)低于5e-
支持多頻率(多達(dá)三個頻率)
平均傳感器功耗降至80 mW
智能iToF調(diào)制,無需擺動誤差校準(zhǔn)
多用戶干擾減少
優(yōu)化低電磁干擾/兼容性
易于集成3D相機(jī)
在1.5 GHz MIPI CSI2接口上輸出原始數(shù)據(jù)(四通道或雙通道)
10/12位可配置ADC分辨率
傳感器原始輸出多達(dá)120 fps(深度電平幀率)
傳感器控制:快速模式+I2C從機(jī)接口(多達(dá)1 MHz)
激光驅(qū)動器接口:LVDS和3線SPI
提供深度重建的軟件ISP
-
傳感器
+關(guān)注
關(guān)注
2576文章
55041瀏覽量
791292 -
芯片
+關(guān)注
關(guān)注
463文章
54010瀏覽量
466010 -
攝像頭
+關(guān)注
關(guān)注
61文章
5091瀏覽量
103117
發(fā)布評論請先 登錄
自動駕駛汽車如何依靠攝像頭判斷距離?

ESP32-S3在初始化攝像頭時檢測到攝像頭模組型號不被支持
TDK ICU - 20201長距離超聲波飛行時間測距傳感器深度解析
自動駕駛既然有雙目攝像頭了,為什么還要三目攝像頭?

3.7V升12V0.5A攝像頭供電芯片H6392
車載雙目攝像頭如何“看見”世界?

【CPKCOR-RA8D1】開發(fā)套件全攻略:從硬件解析到攝像頭顯示Demo實戰(zhàn)
【CPKCOR-RA8D1】開發(fā)套件全攻略:從硬件解析到攝像頭顯示Demo實戰(zhàn)
【CPKCOR-RA8D1】3.測試攝像頭及屏幕
意法半導(dǎo)體圖像傳感器的崛起之路
【VisionFive 2單板計算機(jī)試用體驗】USB攝像頭測試
攝像頭傳感器無法通過CX3進(jìn)行直播怎么解決?
Made with KiCad(126):Antmicro OV5640 雙攝像頭子板
安森美這款iToF傳感器讓3D深度測量技術(shù)輕松落地

全球攝像頭模組和傳感器CMOS主要廠商




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論