") MS35229N——12V、256 細(xì)分靜音步進(jìn)電機(jī)驅(qū)動(dòng)器
MS35229N——12V、256 細(xì)分靜音步進(jìn)電機(jī)驅(qū)動(dòng)器

產(chǎn)品簡(jiǎn)述
MS35229N 是一款 12V 靜音步進(jìn)電機(jī)驅(qū)動(dòng)芯片,工
作電壓最大可以到 15V,輸出 RMS 電流 1A。芯片內(nèi)置
256 細(xì)分的微步進(jìn)驅(qū)動(dòng)技術(shù),靜音與低振動(dòng)特性適合于
各種精微控制系統(tǒng)。
芯片集成通用的 I 2C 接口以及內(nèi)部指令緩存器,使
得控制電機(jī)運(yùn)行得更加流暢。輸入邏輯電平兼容 3.3V/5V
的標(biāo)準(zhǔn)工業(yè)接口。
主要特點(diǎn)
?步進(jìn)電機(jī)驅(qū)動(dòng),支持全步進(jìn)到最高
256 微細(xì)分步進(jìn)
?靜音、低振動(dòng)
?I 2C 串行總線通信控制
?具有指令緩存功能,電機(jī)按照當(dāng)前指
令轉(zhuǎn)動(dòng)時(shí),預(yù)存下一條指令
?欠壓保護(hù)、限流保護(hù)、過流保護(hù)、
過溫保護(hù)
?待機(jī)保持電流可調(diào)節(jié)
?內(nèi)置系統(tǒng)時(shí)鐘,省去外部時(shí)鐘
?省電休眠模式下電流<1μA
?QFN16 封裝
應(yīng)用
?機(jī)器人,精密工業(yè)設(shè)備
?搖頭機(jī)
?監(jiān)控?cái)z像機(jī)
?靜音對(duì)焦系統(tǒng)
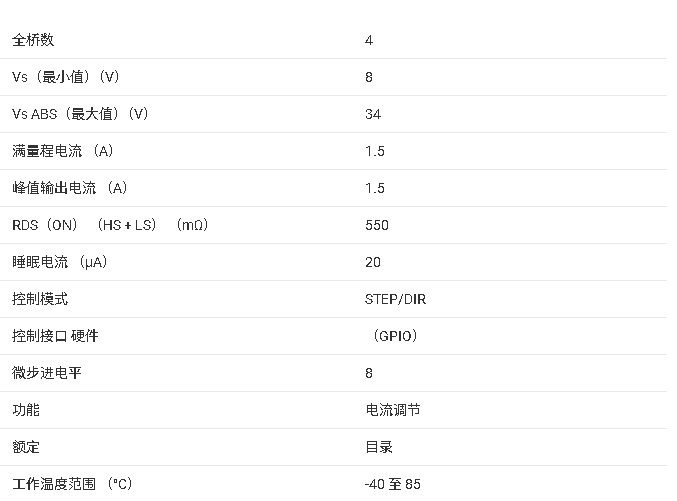
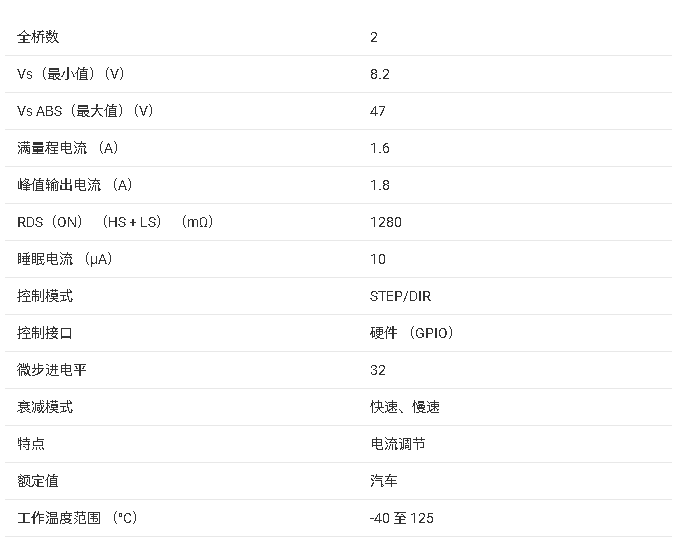
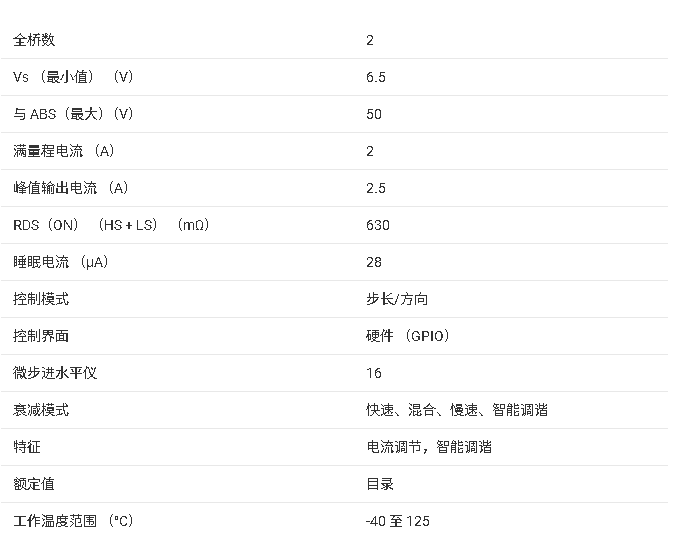
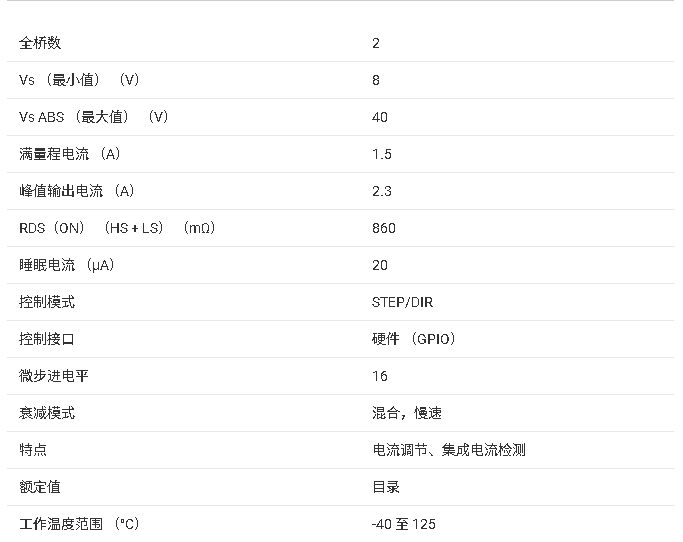
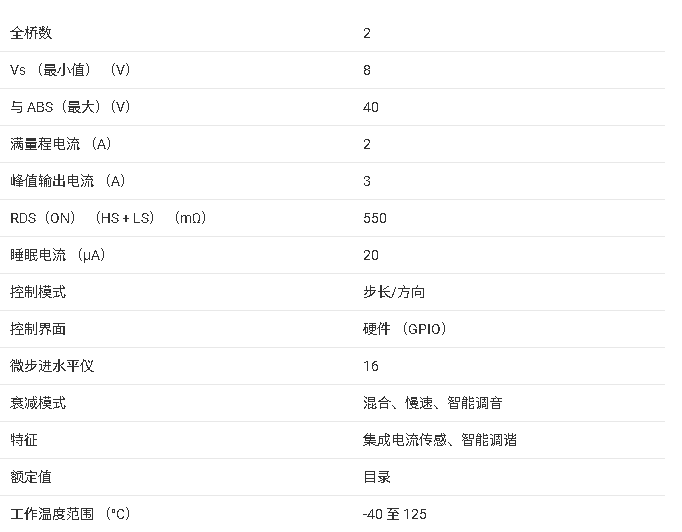
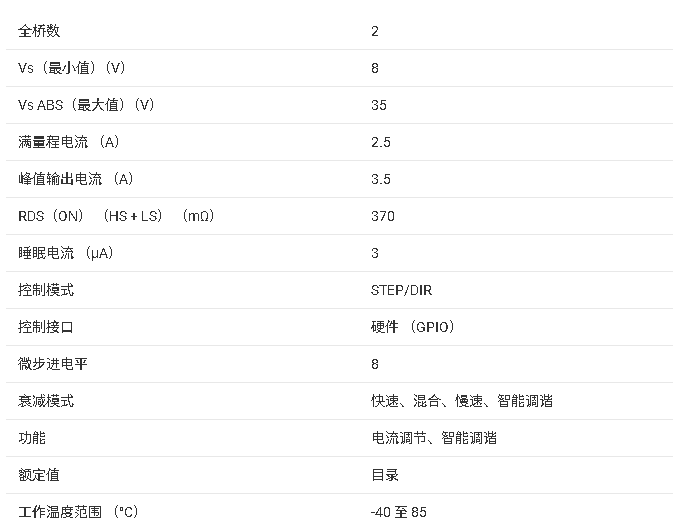
產(chǎn)品規(guī)格分類

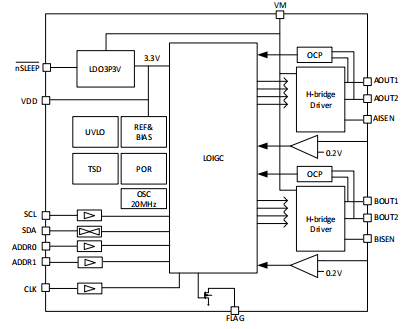
內(nèi)部框圖
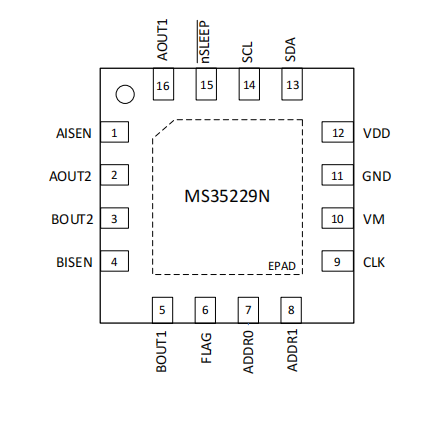
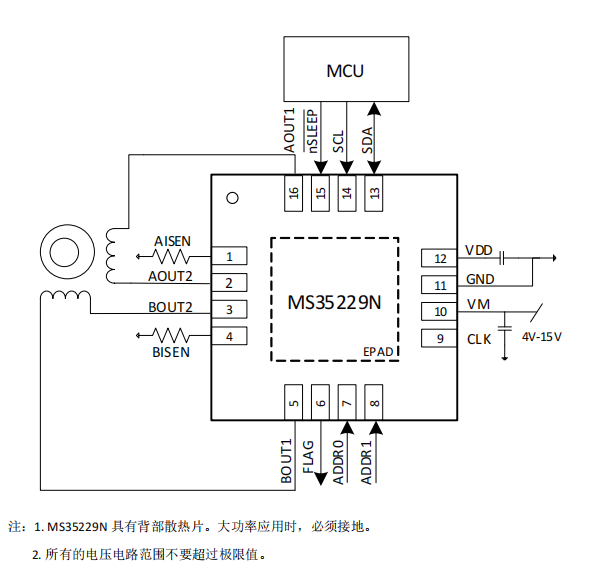
管腳圖
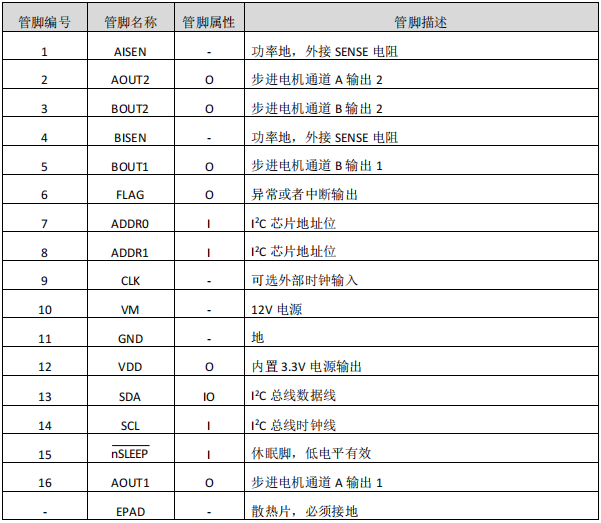
管腳說明
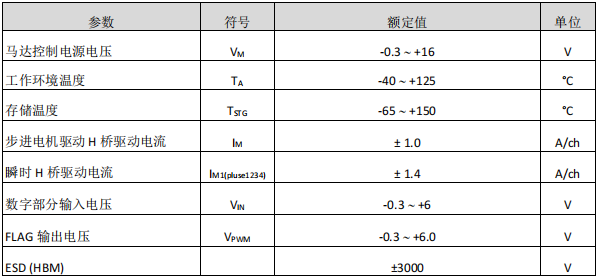
極限參數(shù)
芯片使用中,任何超過極限參數(shù)的應(yīng)用方式會(huì)對(duì)器件造成永久的損壞,芯片長(zhǎng)時(shí)間處于極限工作
狀態(tài)可能會(huì)影響器件的可靠性。極限參數(shù)只是由一系列極端測(cè)試得出,并不代表芯片可以正常工作在
此極限條件下。
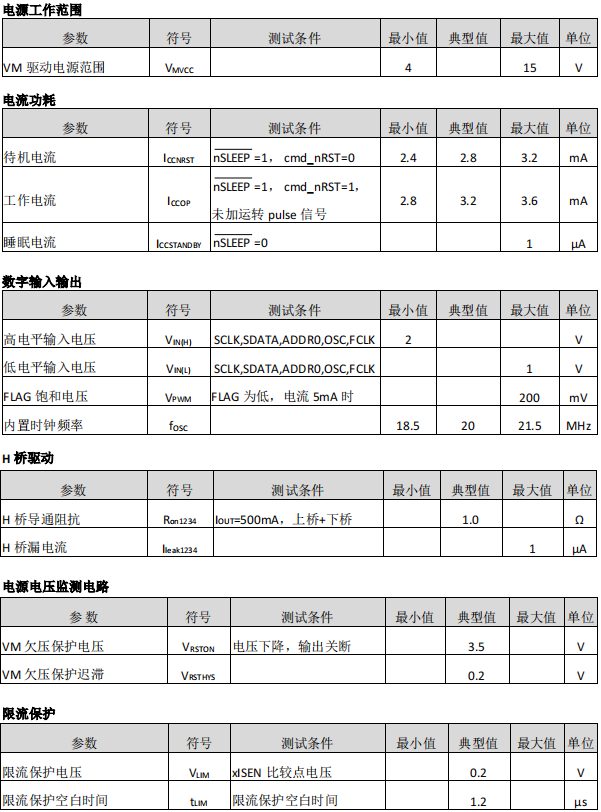
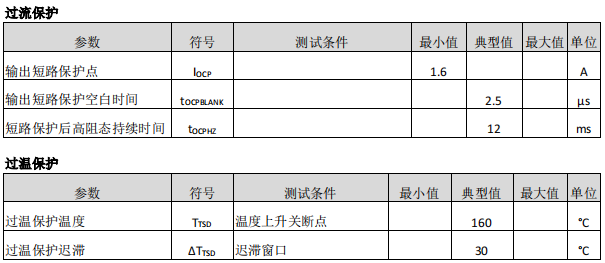
電氣參數(shù)
VM=12V 。注意:沒有特別規(guī)定,環(huán)境溫度為TA= 25°C ±2°C。
如有需求請(qǐng)聯(lián)系——三亞微科技 王子文(16620966594)
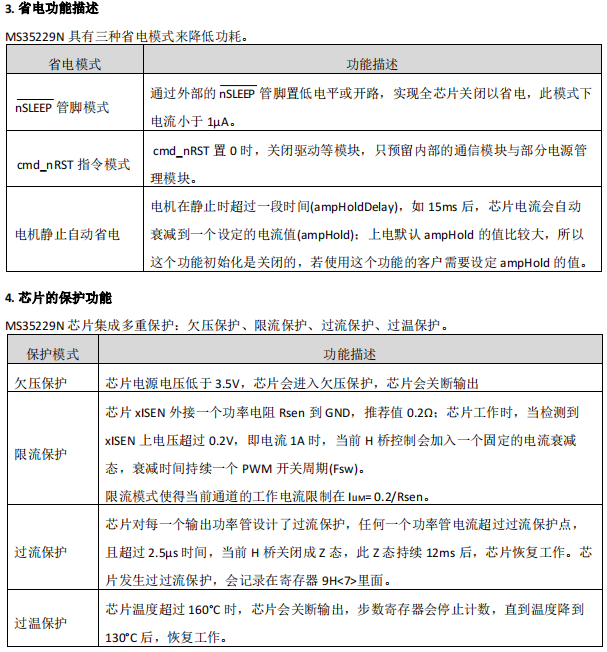
功能描述
MS35229N 通過 I 2C 總線去控制電機(jī)的轉(zhuǎn)動(dòng)。步進(jìn)電機(jī)控制器可以選擇全步進(jìn) 1/256 的步進(jìn)模式。
1. I 2C 總線接口
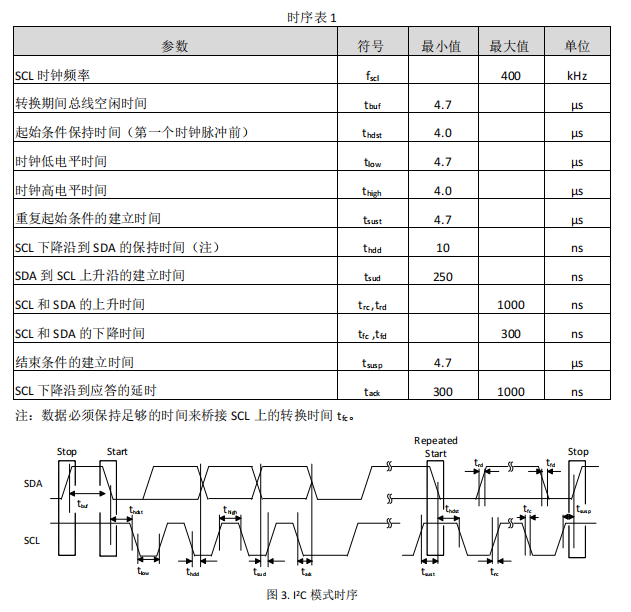
芯片接口為 I 2C,SDA 是一個(gè)雙向數(shù)據(jù)線,SCL 是時(shí)鐘輸入。圖 1 和 2 分別顯示了一個(gè)寫和一個(gè)讀
周期的信號(hào)時(shí)序。當(dāng)時(shí)鐘信號(hào)為高電平時(shí),SDA 有一個(gè)下降沿作為起始條件;時(shí)鐘信號(hào)為高電平時(shí),
SDA 的上升沿作為結(jié)束條件。SDA 的其它所有變化都發(fā)生在時(shí)鐘信號(hào)為低電平時(shí)。
MS35229N 的通信中,在起始條件后,由 7 位芯片地址和 1 位讀/寫位(高為讀,低為寫)組成的
第一個(gè)字節(jié)(ADDR)被發(fā)送到 MS35229N。7 位地址的第 1 位、第 2 位由 ADDR1 和 ADDR0 的高低電平控
制,末 5 位為固定的 10000。地址的第 8 位是讀/寫位。如果是一個(gè)【寫】操作,接下來的一個(gè)字節(jié)包
含寄存器地址指針(MAP),用來選擇的所要讀或?qū)懙募拇嫫鳌H绻莻€(gè)【讀】操作,將輸出 MAP 所指
的寄存器的內(nèi)容。MAP 自動(dòng)遞增,寄存器的數(shù)據(jù)將會(huì)依次輸出。每一個(gè)字節(jié)由一個(gè)應(yīng)答位(ACK)分隔開。
在每次輸入字節(jié)讀取后 MS35229N 輸出應(yīng)答位,每一個(gè)傳輸?shù)淖止?jié)后微控制器發(fā)送應(yīng)答位給
MS35229N。
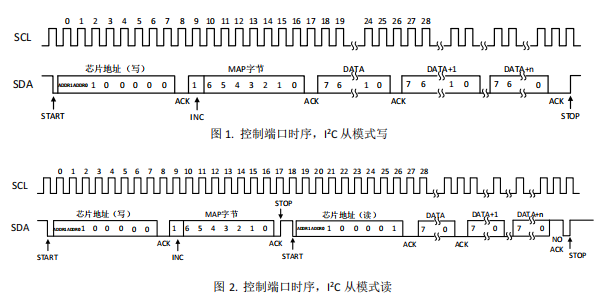
注意讀操作時(shí)不能設(shè)置 MAP,因此需要一個(gè)終止的寫操作作為一個(gè)頭碼。如圖 2 所示,在作為
MAP 的應(yīng)答后發(fā)送一個(gè)停止條件,則寫操作終止。
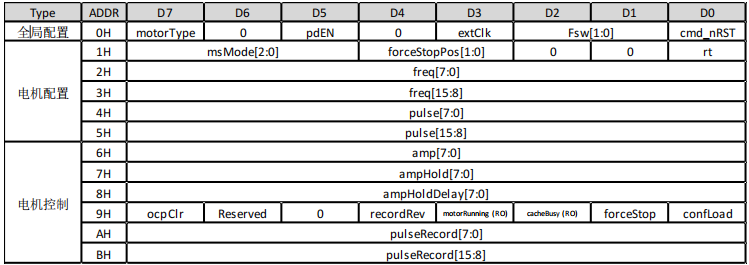
2. 寄存器說明
寄存器地址指針(MAP)。MAP 有 8 位字長(zhǎng),它包含讀和寫的控制端口地址,在每個(gè)控制端口讀或
寫完成后自增。MAP 位如圖 1 或 2 所示。
寄存器表如下
注:
1. 電機(jī)框圖中的 LOGIC 部分,分為通信模塊和功能模塊。通信模塊負(fù)責(zé) I 2C 通信,功能模塊負(fù)責(zé)電機(jī)
運(yùn)行控制。
2. 在上電復(fù)位之后,通信和功能模塊的寄存器都被置為初始態(tài),0x07 初始值 0xFF,0x08 初始值 0x0F。
3. 通過 cmd_nRST 復(fù)位后,僅功能模塊的寄存器被置為初始態(tài),但是通信部分的寄存器并不會(huì)被復(fù)位。
此時(shí)讀取寄存器仍會(huì)讀到之前的配置值。
4. 寫入 寄存器的數(shù)據(jù)在其所屬地址(的數(shù)據(jù))寫入完成后確定。
5. msMode、rt、freq 和 pulse 寄存器有緩存寄存器,除這些之外的寄存器組則沒有。
6. FLAG 管腳為開漏輸出,上拉后默認(rèn)輸出高電平。當(dāng)以下任一情況發(fā)生:
① 一組配置運(yùn)行結(jié)束。
② 欠壓事件發(fā)生。
③ 過流事件發(fā)生。
此時(shí),F(xiàn)LAG 管腳會(huì)輸出一個(gè)寬度為 t 的低電平脈沖信號(hào),可用于通知主控。脈沖寬度 t 計(jì)算如下:
t(μs)=127÷fCLK(MHz)
2.1 cmd_nRST

注:1. 置 0 時(shí),功能模塊 寄存器被置為初始態(tài)。在開始配置其他寄存器前需要首先將此位設(shè)置為 1。
2. 置 0 時(shí),輸出端口將呈高阻狀態(tài),同時(shí)部分內(nèi)部模塊將被關(guān)閉以降低待機(jī)功耗,實(shí)現(xiàn)‘指令省電’。
注:
1. 初始態(tài)僅在釋放復(fù)位信號(hào)(上電復(fù)位或 cmd_nRST 指令復(fù)位)后存在,請(qǐng)勿將 Cycle 設(shè)置到禁用范圍。
2. fCLK為提供給主邏輯的時(shí)鐘頻率,此處以外接時(shí)鐘 24MHz 為例。
例:cycle = 0x02EE
脈沖頻率 = 24e6/(750×16)=2000[pps]
如有需求請(qǐng)聯(lián)系——三亞微科技 王子文(16620966594)
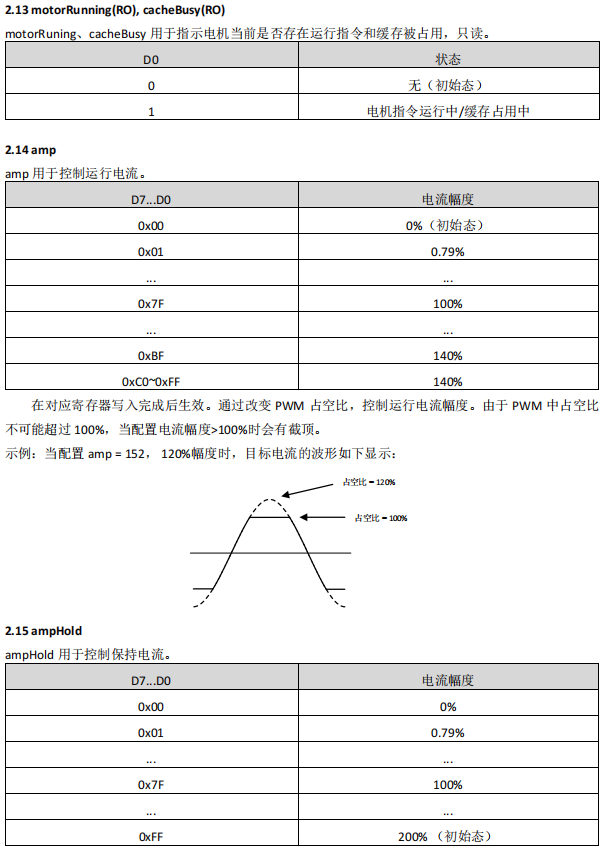
當(dāng)電機(jī)運(yùn)行結(jié)束后,若運(yùn)行電流配置值>保持電流配置值,則每 10ms 當(dāng)前電流衰減 1 個(gè)單位,
(amp 滿幅值 127 單位)。若保持電流配置值>運(yùn)行電流配置值,運(yùn)行結(jié)束后電流不衰減。
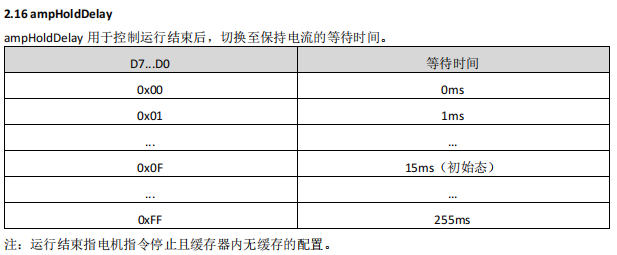
注:運(yùn)行結(jié)束指電機(jī)指令停止且緩存器內(nèi)無緩存的配置。
2.17 ocpClr, otsClr
ocpClr 和 otsClr 分別用于清除過流事件緩存和過溫事件緩存。
當(dāng)發(fā)生過流事件或過溫事件,可以從這兩位寄存器中讀取到【發(fā)生過】的記錄,不代表一直在發(fā)
生。向?qū)?yīng)的標(biāo)識(shí)位寫 1,可將其置為 0。
2.18 pulseRecord, recordRev
pulseRecord 用于記錄已運(yùn)行的 pulse 數(shù),默認(rèn)值為 0x0000。當(dāng) recordRev = 0(初始態(tài)),運(yùn)行 rt
= 0 的配置時(shí)正向記錄(累加),rt = 1 時(shí)逆向記錄(累減),記滿 0xFFFF 后若繼續(xù)累加則翻轉(zhuǎn)為
0x0000,0x0000 后若繼續(xù)累減則翻轉(zhuǎn)為 0xffff。
recordRev 用于變更記錄極性,recordRev = 1 時(shí), rt = 0 為逆向記錄,rt = 1 為正向記錄。向
pulseRecord(0x0A, 0x0B 地址)直接寫入可變更當(dāng)前記錄值,當(dāng)前記錄值在 0x0B 地址寫入完成后變更
(僅寫入 0x0A 不會(huì)變更,但對(duì) 0x0A 地址的寫入會(huì)被保持,在下一次 0x0B 地址寫入后生效)。在橋驅(qū)
關(guān)閉時(shí)(pdEN = 0 或過流事件、過溫事件發(fā)生時(shí)),不會(huì)記錄運(yùn)行的 pulse 數(shù)。
2.19 緩存功能
MS35229N 擁有 1 組 Cache 寄存器,可在電機(jī)正在運(yùn)行時(shí)暫時(shí)寄存輸入的指令,電機(jī)執(zhí)行完當(dāng)前
任務(wù)之后會(huì)接續(xù)按照寄存的指令繼續(xù)運(yùn)行。
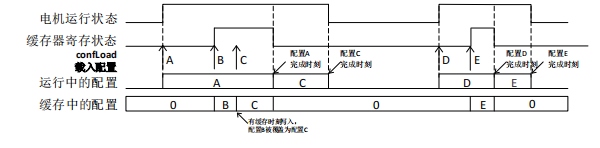
步進(jìn)電機(jī)的運(yùn)行指令(msMode, cycle, rt, pulse)在 confLoad 寫入后確定。當(dāng)前指令運(yùn)行時(shí),再次載
入的配置會(huì)暫存于 Cache 寄存器,在當(dāng)前指令完成后被接續(xù)。Cache 中已經(jīng)寄存配置時(shí)仍可接收后載
入的配置,新輸入的配置會(huì)覆蓋原有配置。
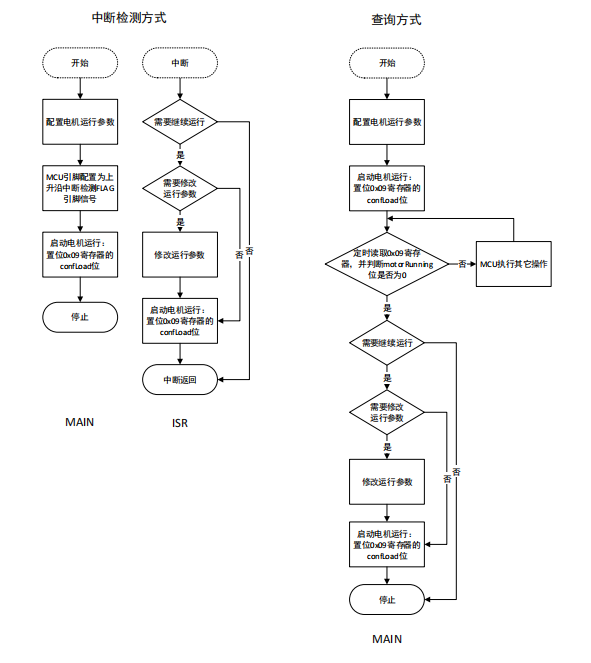
在寫入 confLoad 時(shí),需要避免配置載入時(shí)刻與上一配置完成時(shí)刻同時(shí)發(fā)生。建議通過中斷檢測(cè)
FLAG 引腳或者寄存器讀取 motorRunning 位,待電機(jī)停止運(yùn)行時(shí),再對(duì) confLoad 寫 1 載入。如實(shí)際應(yīng)
用中,確實(shí)需要提前對(duì) confLoad 進(jìn)行操作,那么需要確保在電機(jī)運(yùn)行結(jié)束前完成操作。
5. 芯片的步數(shù)計(jì)數(shù)功能
芯片內(nèi)置一個(gè)計(jì)數(shù)器,當(dāng)正轉(zhuǎn)時(shí)增量計(jì)數(shù),反轉(zhuǎn)時(shí)減量計(jì)數(shù),客戶可以通過讀此計(jì)數(shù)器的值來確
定位置。也可以通過比較此計(jì)數(shù)器與實(shí)際發(fā)送的值,來計(jì)算由于欠壓、過流、過溫等異常導(dǎo)致的丟步。
詳情見寄存器 pulseRecord、 recordRev 的描述。
6. 芯片的時(shí)鐘
芯片內(nèi)置集成一個(gè) OSC 時(shí)鐘振蕩器,頻率為 20MHz。此時(shí)鐘的波動(dòng)范圍約±3%。
典型應(yīng)用圖
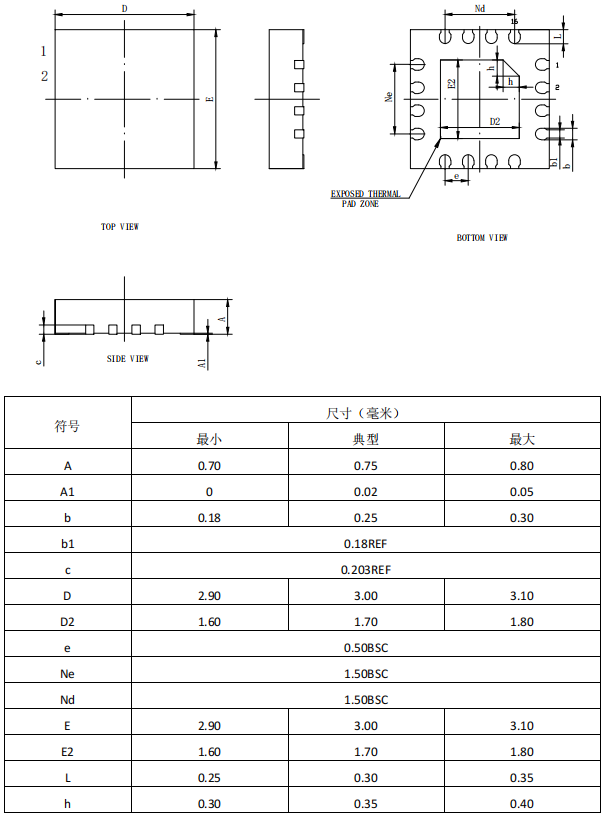
封裝外形圖
QFN16
——愛研究芯片的小王
審核編輯 黃宇
-
步進(jìn)電機(jī)驅(qū)動(dòng)器
+關(guān)注
關(guān)注
0文章
139瀏覽量
13643
發(fā)布評(píng)論請(qǐng)先 登錄
步進(jìn)電機(jī)驅(qū)動(dòng)器的作用介紹

DRV8886AT步進(jìn)電機(jī)驅(qū)動(dòng)器:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)
深入解析DRV8421:18V 2A雙H橋步進(jìn)電機(jī)驅(qū)動(dòng)器
?DRV8821 雙路步進(jìn)電機(jī)控制器與驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?TPIC2050 電機(jī)驅(qū)動(dòng)IC技術(shù)文檔總結(jié)

?TPIC2060A 9通道電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)

?DRV8824-Q1 汽車級(jí)步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8880 步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8885 1.5A步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8886AT 2A步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8818A 35V步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
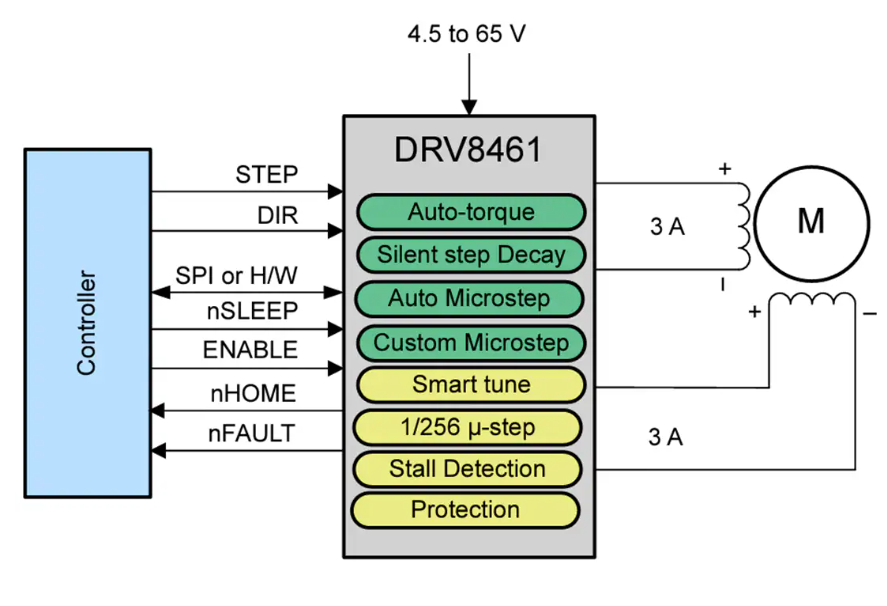
DRV8461步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)解析與應(yīng)用指南
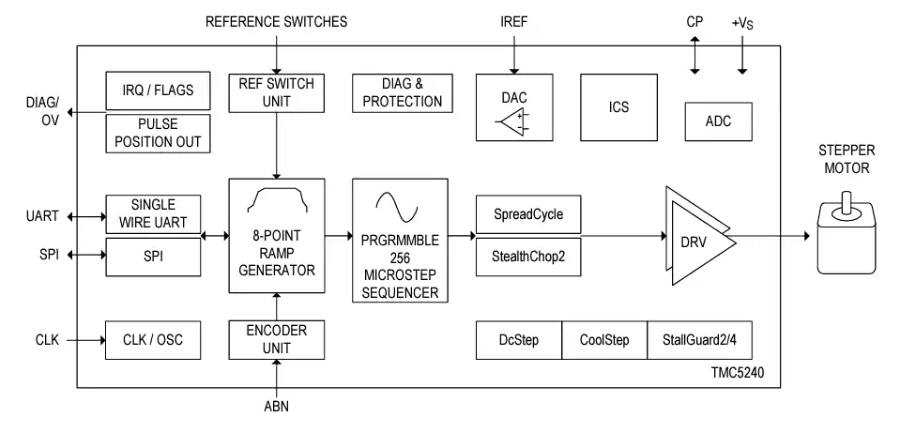
ADI Trinamic TMC5240x步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器IC
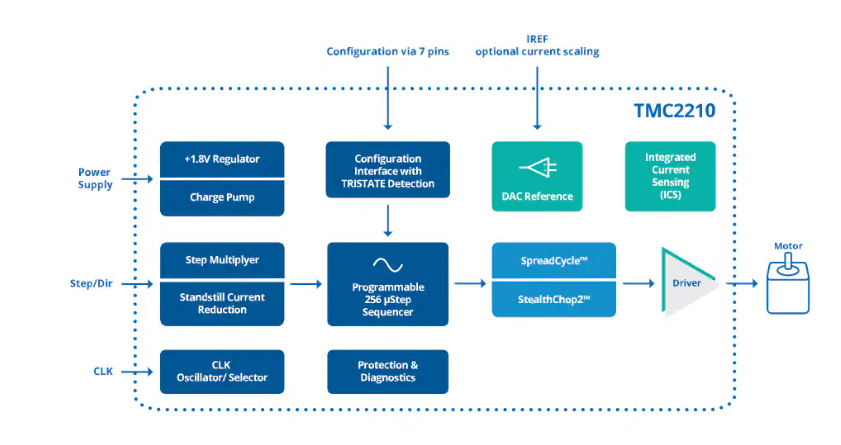
ADI Trinamic TMC2210大電流步進(jìn)電機(jī)驅(qū)動(dòng)器IC數(shù)據(jù)手冊(cè)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論