") Made with KiCad(十二):JPL開(kāi)源漫游車
Made with KiCad(十二):JPL開(kāi)源漫游車

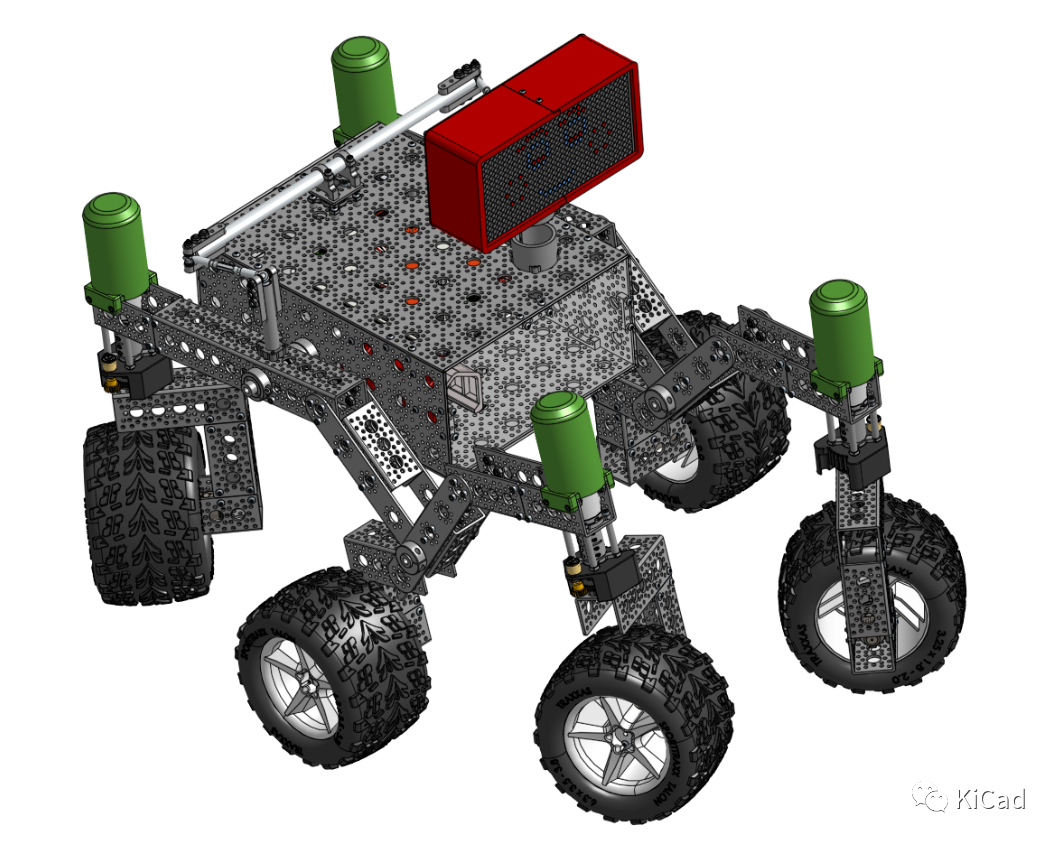
“JPL 開(kāi)源漫游車是 JPL 用于探索火星表面的六輪漫游車設(shè)計(jì)的縮減版,是一種開(kāi)源、自己動(dòng)手制造的漫游車。”
概覽
JPL 開(kāi)源漫游車是 JPL 用于探索火星表面的六輪漫游車設(shè)計(jì)的縮減版,是一個(gè)開(kāi)源、自己動(dòng)手制造的漫游車。開(kāi)源漫游車的設(shè)計(jì)幾乎完全采用現(xiàn)成的消費(fèi)者部件(COTS)。該項(xiàng)目旨在為那些希望參與機(jī)械工程、軟件、電子或機(jī)器人技術(shù)的人提供教學(xué)和學(xué)習(xí)經(jīng)驗(yàn)。

Spec及技術(shù)參數(shù)
您制作的機(jī)器人的具體屬性將取決于您為系統(tǒng)購(gòu)買的電子設(shè)備和電機(jī)類型。下面顯示的屬性是按照我們建議的部件(BOM)組裝的機(jī)器人版本。您可以嘗試看看哪些部件可以進(jìn)行規(guī)格升級(jí)。
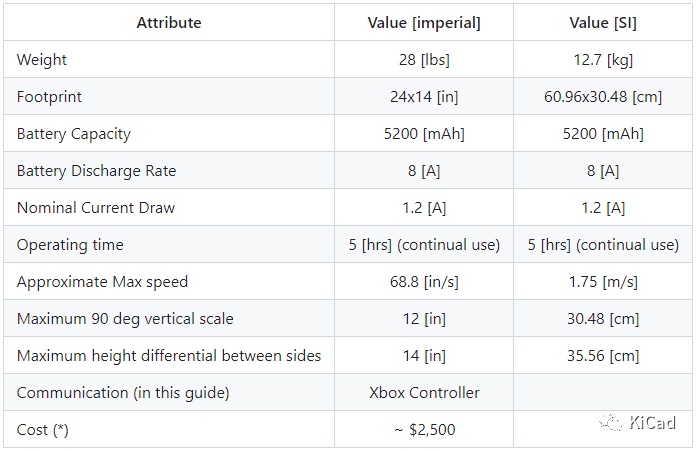
上述統(tǒng)計(jì)數(shù)據(jù)取決于您在購(gòu)買部件時(shí)選擇的組件。例如,您可以選擇更高轉(zhuǎn)速的電機(jī)(以更快地驅(qū)動(dòng)漫游車),但要犧牲最大失速扭矩,這可能會(huì)限制漫游車的爬坡能力。您可以在 GoBilda 網(wǎng)站上找到易于與漫游車設(shè)計(jì)其他部分集成的電機(jī)。 功能 該漫游車的設(shè)計(jì)功能與火星上的六輪漫游車設(shè)計(jì)類似,并采用了火星漫游車用于穿越巖石表面的一些主要驅(qū)動(dòng)機(jī)械裝置:
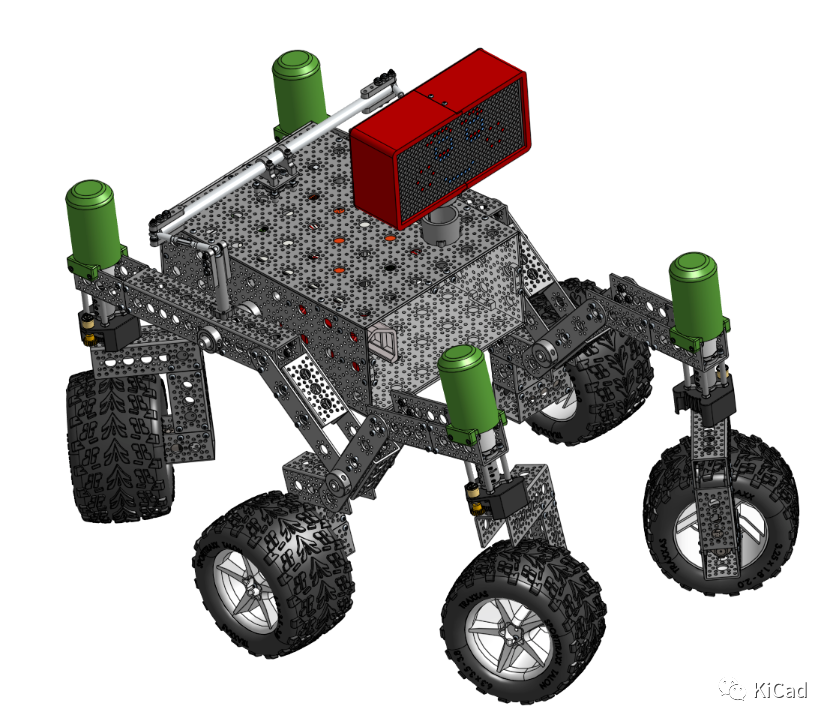
搖臂式懸掛系統(tǒng):Rocker-Bogie懸掛系統(tǒng)允許所有6個(gè)車輪在翻越障礙物時(shí)持續(xù)與地面接觸
差速樞軸:在攀爬時(shí),可將重量從漫游車的一側(cè)機(jī)械地卸載到另一側(cè)
6 輪阿克曼轉(zhuǎn)向系統(tǒng):驅(qū)動(dòng)和轉(zhuǎn)向/回轉(zhuǎn)裝置,用于控制車輪的指向以及每個(gè)車輪的移動(dòng)速度。
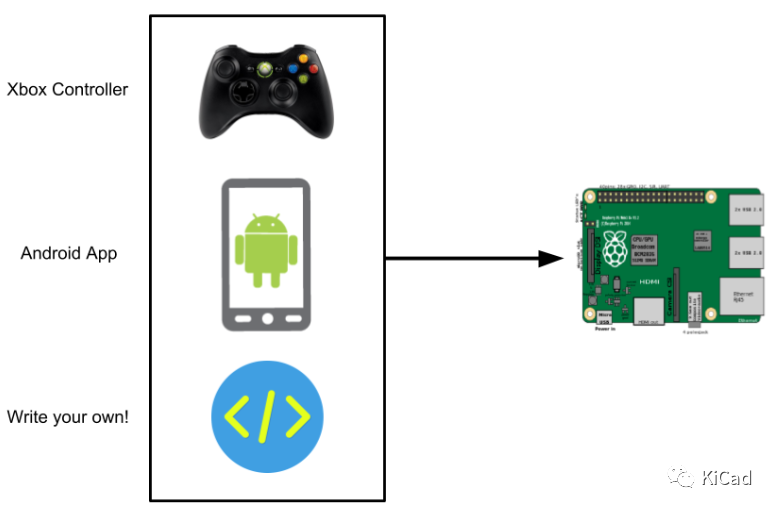
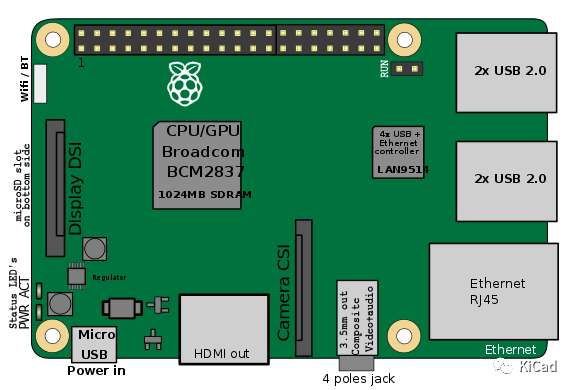
我們選擇樹莓派(Raspberry Pi)作為機(jī)器人的 "大腦",是因?yàn)樗哂卸喙δ苄浴⒁捉咏浴⒑?jiǎn)易性,并且能夠添加和升級(jí)您自己的改裝。任何可以與 Raspberry Pi 通信的方法(藍(lán)牙、WiFi、USB 設(shè)備等)都可以連接到機(jī)器人的控制系統(tǒng)。
以下是 Raspberry Pi 上的開(kāi)放通信端口和硬件:
4 個(gè) USB 端口(使用 Xbox 控制器時(shí)為 3 個(gè))
RPi 攝像頭端口
1 個(gè) I2C 總線(使用 LED 矩陣屏?xí)r為 0)
2 個(gè) SPI 總線(使用 LED 矩陣屏幕時(shí)為 1)
3.5 毫米音頻插孔
13 個(gè) GPIO 引腳(使用 LED 矩陣屏幕時(shí)為 6 個(gè))
使用上述端口,理論上您可以通過(guò)攝像頭、USB轉(zhuǎn)接器連接到任何東西(您自己的視頻游戲控制器、USB 麥克風(fēng)或其他......發(fā)揮創(chuàng)意!)。或使用 Pi 的 GPIO 端口(距離傳感器、加速度計(jì)等)的任何接口自主驅(qū)動(dòng)漫游車。我們只提供了兩種簡(jiǎn)單的控制漫游車的方法......我們希望你能想出更多的方法!
對(duì)于漫游車的動(dòng)力系統(tǒng),我們還提供了充足的備用電源,可用于您自己的附加組件和升級(jí)。更多詳細(xì)信息,請(qǐng)參閱電氣子系統(tǒng)文檔: https://github.com/nasa-jpl/open-source-rover/tree/master/electrical
在線3D模型

還有一個(gè)開(kāi)源漫游車的 Onshape 模型。該模型包括漫游車在整個(gè)構(gòu)建說(shuō)明中每個(gè)步驟的狀態(tài)!因此,在制作過(guò)程中,除了參考制作說(shuō)明中的照片外,您還可以參考在線 3D 模型,以確保制作順利進(jìn)行。注意:最新的模型和唯一的真相來(lái)源是 SolidWorks 組件,OnShape 模型可能已經(jīng)過(guò)時(shí)。
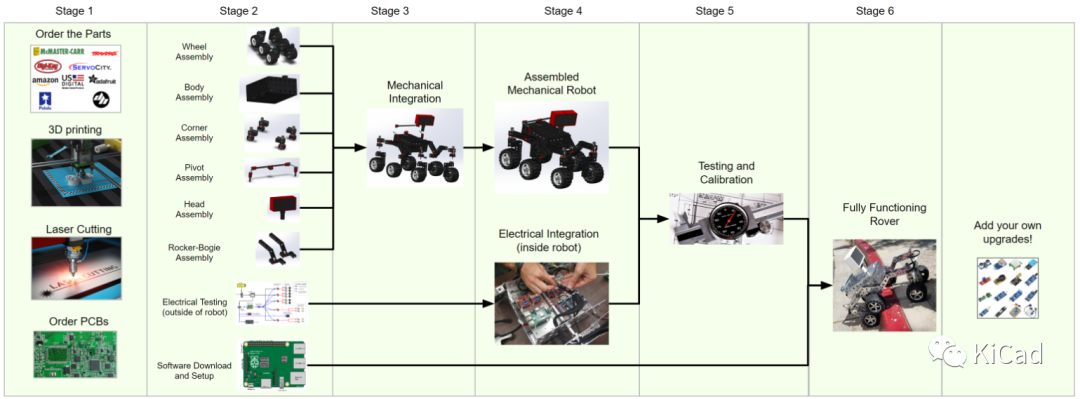
Rover裝配階段
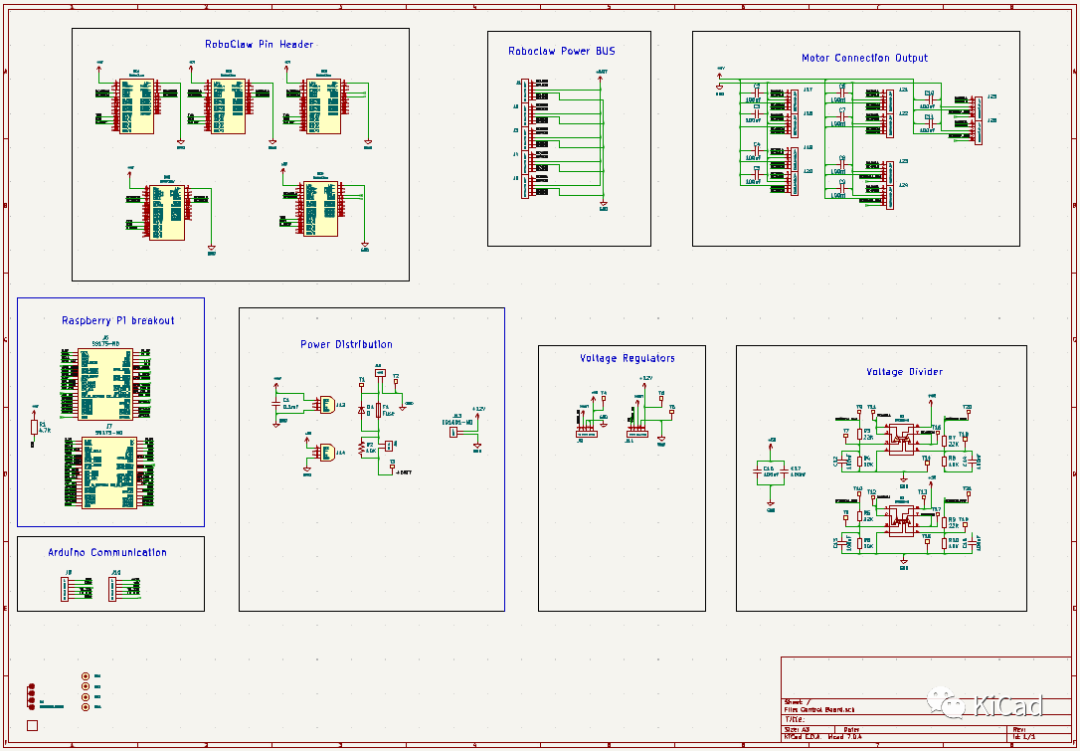
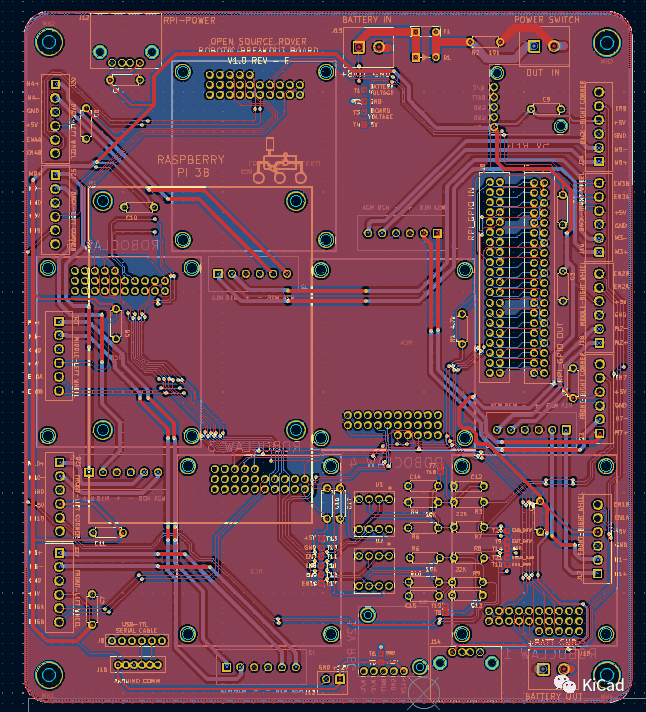
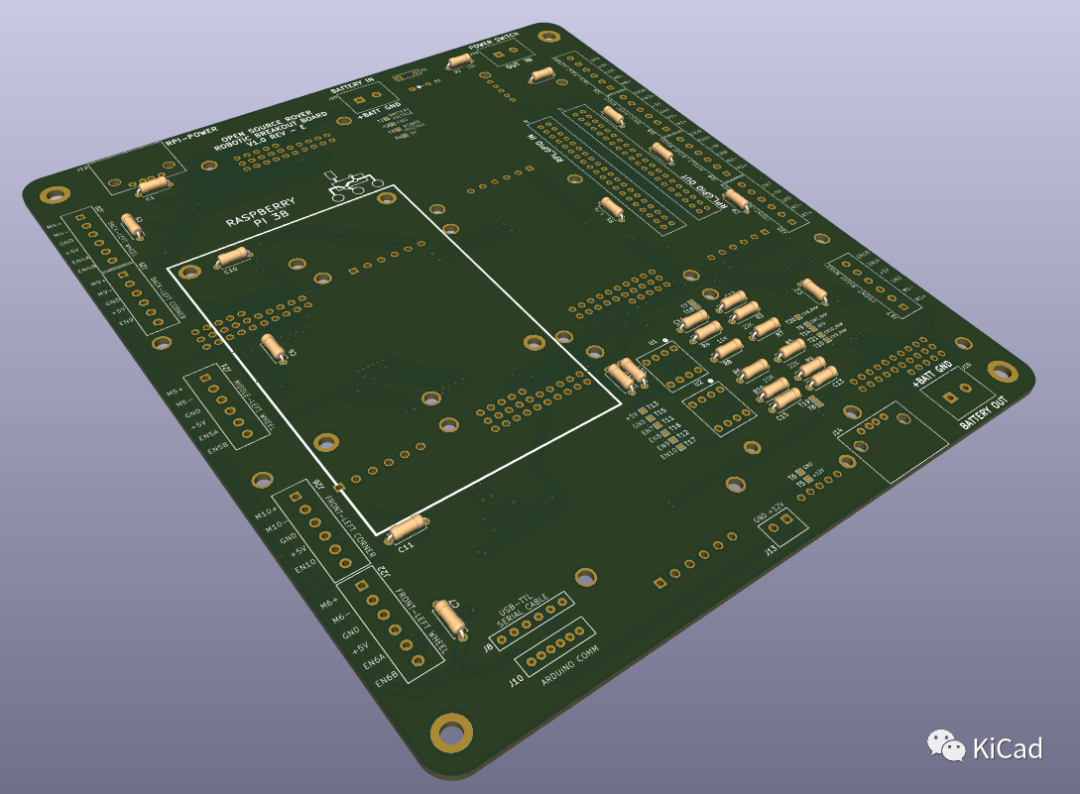
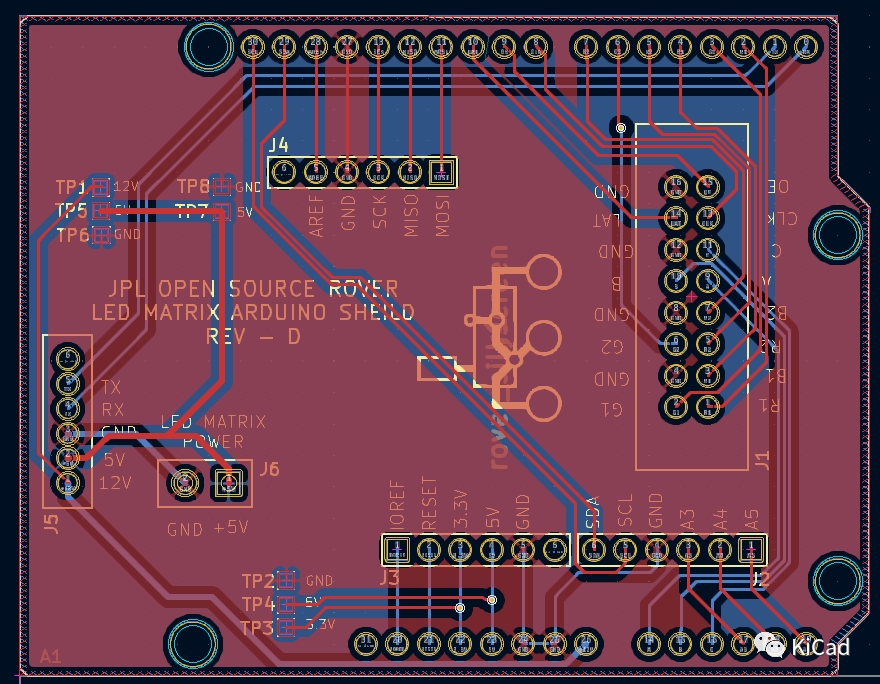
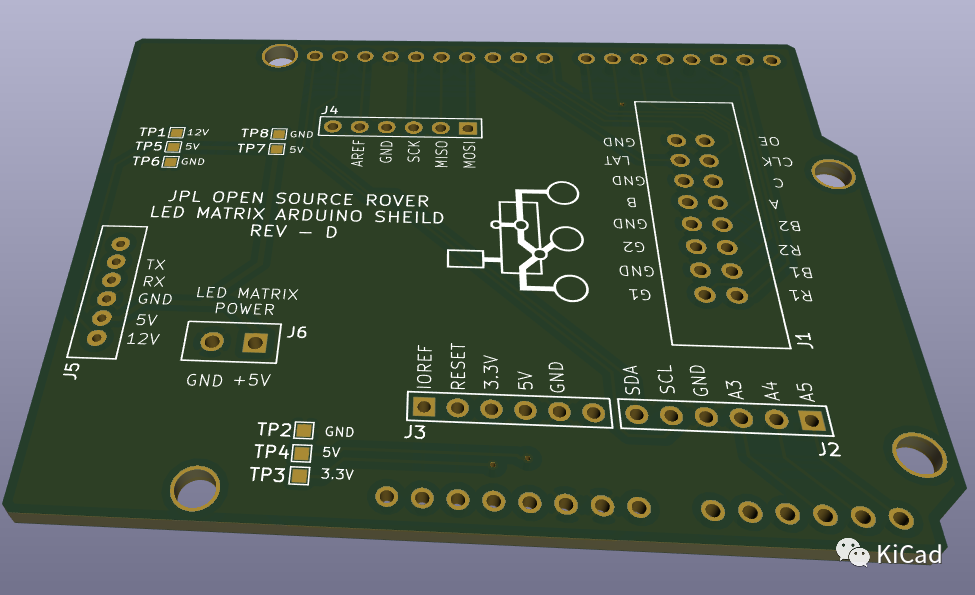
原理圖 & PCB
控制板:
Arduino-Shield板
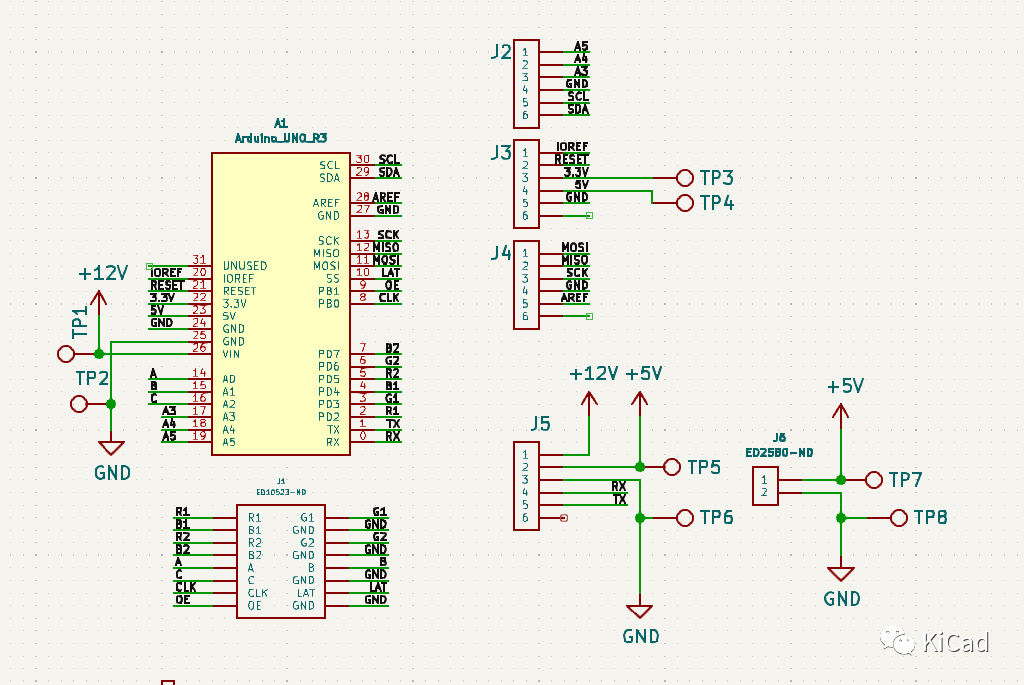
控制板接口
License
Apache-2.0 License
倉(cāng)庫(kù) & 下載
可以在Github中獲取開(kāi)源倉(cāng)庫(kù): https://github.com/nasa-jpl/open-source-rover/tree/master 倉(cāng)庫(kù)文件較大,Github不穩(wěn)定的用戶也可以在公眾號(hào)后臺(tái)輸入 “火星車” 進(jìn)行下載,倉(cāng)庫(kù)中包含了軟硬件及機(jī)械機(jī)構(gòu)文件。
-
開(kāi)源
+關(guān)注
關(guān)注
3文章
4203瀏覽量
46128 -
KiCAD
+關(guān)注
關(guān)注
5文章
321瀏覽量
10394
發(fā)布評(píng)論請(qǐng)先 登錄
Made with KiCad(140):Hassoscope Pro 2G 帶寬的 USB 示波器

Made with KiCad(138):AnyShake Explorer一款開(kāi)源、專業(yè)級(jí)的地震監(jiān)測(cè)系統(tǒng)
Made with KiCad(137):FourThirdsEye 開(kāi)源 M4/3 相機(jī)模塊
Made with KiCad(135):Echo - 開(kāi)源的音樂(lè)播放器

開(kāi)源Made with KiCad(134):Icepi Zero - 基于Lattice ECP5的便攜FPGA開(kāi)發(fā)板
Made with KiCad(132):PCB 應(yīng)變片(Strain Gauge)
開(kāi)源工具 Made with KiCad(131):BomberCat 安全測(cè)試工具
開(kāi)源 Made with KiCad(129):CatSniffer IoT 多協(xié)議工具
【開(kāi)源分享】Made with KiCad(128):CANBoard V2 開(kāi)源一款支持CAN的簡(jiǎn)單IO板
Made with KiCad(128):CANBoard V2 開(kāi)源一款支持CAN的簡(jiǎn)單IO板
Made with KiCad(100):RM2024 超級(jí)電容控制器
Made with KiCad(122):ANAVI Miracle Emitter
Made with KiCad(121):OpenRPNCalc 開(kāi)源科學(xué) RPN 計(jì)算器
Made with KiCad(119):基于 ESP32 的離線便攜式全球?qū)Ш叫l(wèi)星系統(tǒng)設(shè)備

Made with KiCad(118):Inkplate 4 TEMPERA 墨水屏終端




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論