 昱感微“多維像素”超級攝像頭產品方案發布!
昱感微“多維像素”超級攝像頭產品方案發布!

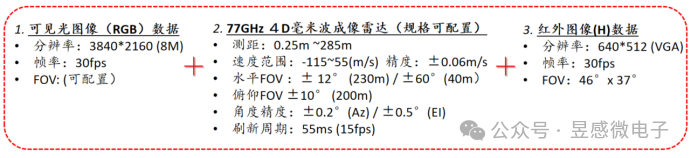
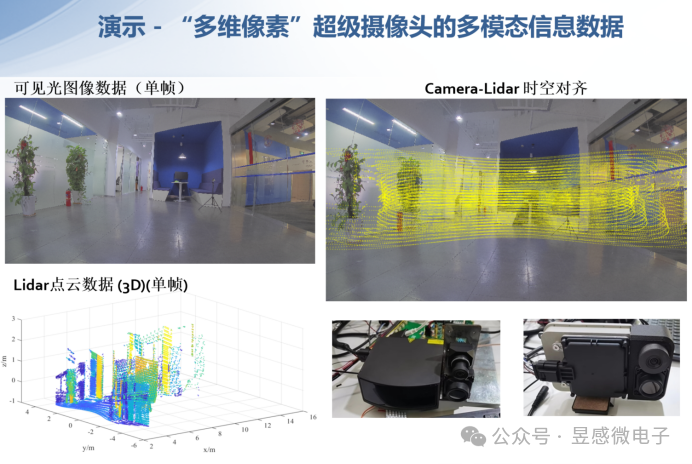
昱感微“多維像素”超級攝像頭采用最前沿的多傳感器器前融合技術,將可見光攝像頭、紅外攝像頭、4D毫米波雷達/激光雷達的探測數據在前端(數據獲取時)融合,并將各傳感器的探測數據“坐標統一、時序對齊”,最后以“多維像素”的數據格式輸出。“多維像素”是昱感微的核心技術創新之一,它是指在可見光攝像頭像素信息上加上其它傳感器對于同源目標感知的信息:即圖像數據+雷達探測目標的距離、速度、散射截面R的感知數據+紅外傳感器探測的熱輻射圖像數據疊加組合到一起,以攝像頭的像素為顆粒度組合全部感知數據,每個像素不僅有視覺信息,還包含了雷達和紅外傳感器的探測數據,形成多維度(多模態)測量參數矩陣數組。
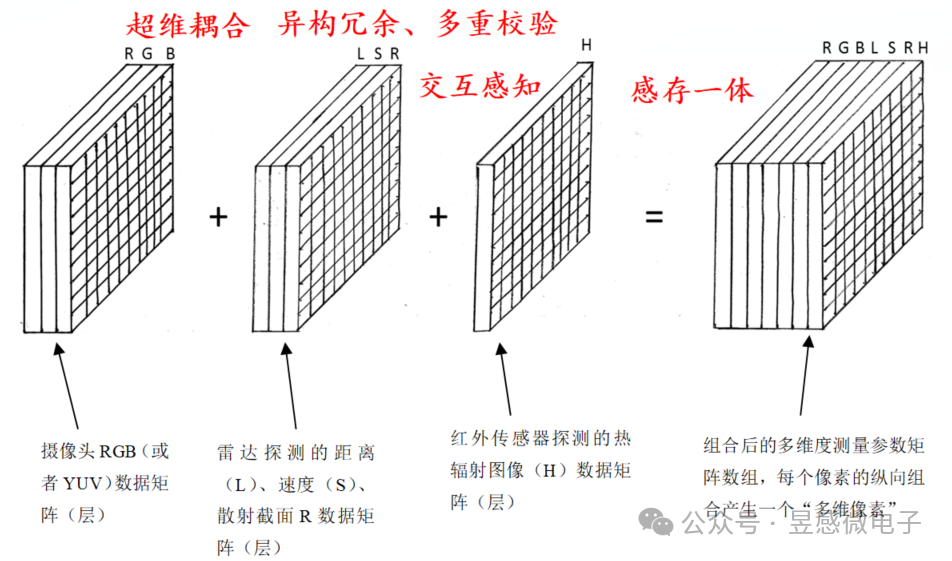
19世紀相機剛問世時照片是黑白色的,圖像僅有明暗信息;后來隨著彩色照片的誕生,圖像不僅有明暗信息還有了色彩RGB信息;現在,昱感微的“多維像素”使圖像不再局限于二維的明暗色彩信息,還有目標的3D位置/距離/速度/材質等多維度的信息,為自動駕駛和機器視覺提供提供目標與環境“多模態語義”精準信息,助力客戶跨越L3/L4級自動駕駛的感知技術難關。
多維像素”超級攝像頭產品方案A
(攝像頭+毫米波雷達組合)

整機規格:
尺寸:175mm X 100mm X 60mm
功耗:26W(峰值功率)
供電要求:12V 3A
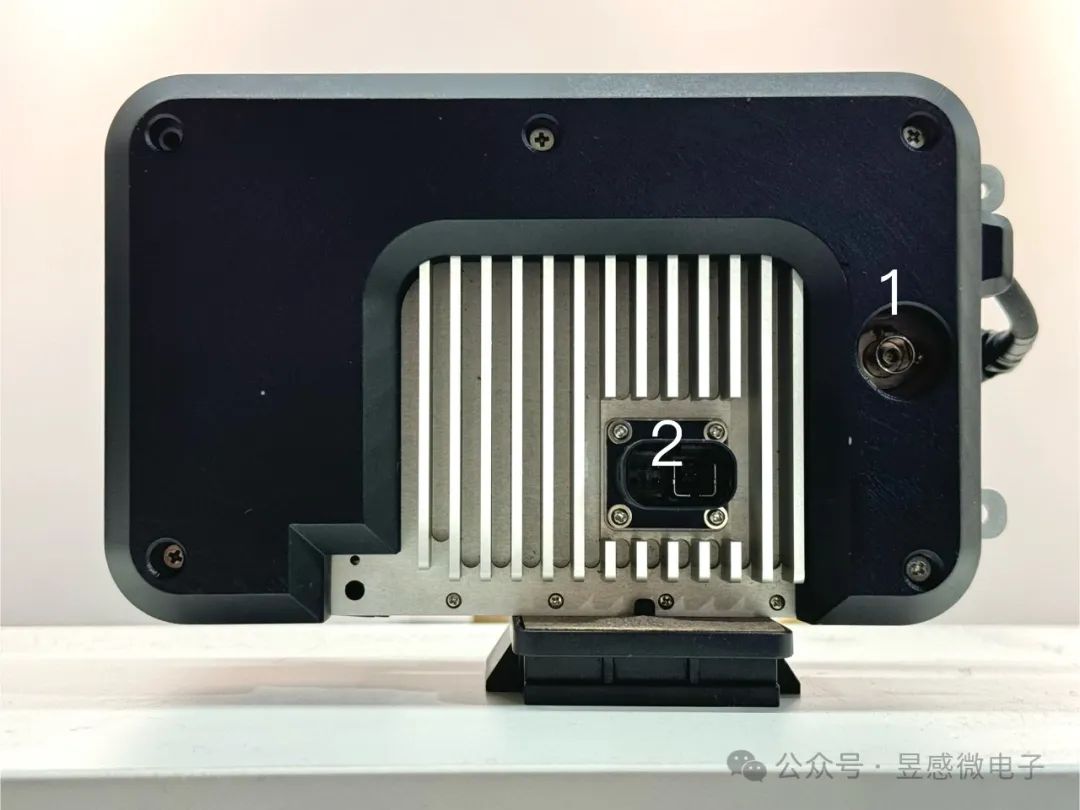
輸出接口規范:
1:標準fakra接口,支持GMSL2協議
2:TE接口
“多維像素”超級攝像頭產品方案B(攝像頭+激光雷達組合)

整機規格:
尺寸:300mm X 225mm X 64mm
功耗:34W(峰值功率)
供電要求:12V 3A

輸出接口規范:
1:標準fakra接口,支持GMSL2協議
2:TE接口

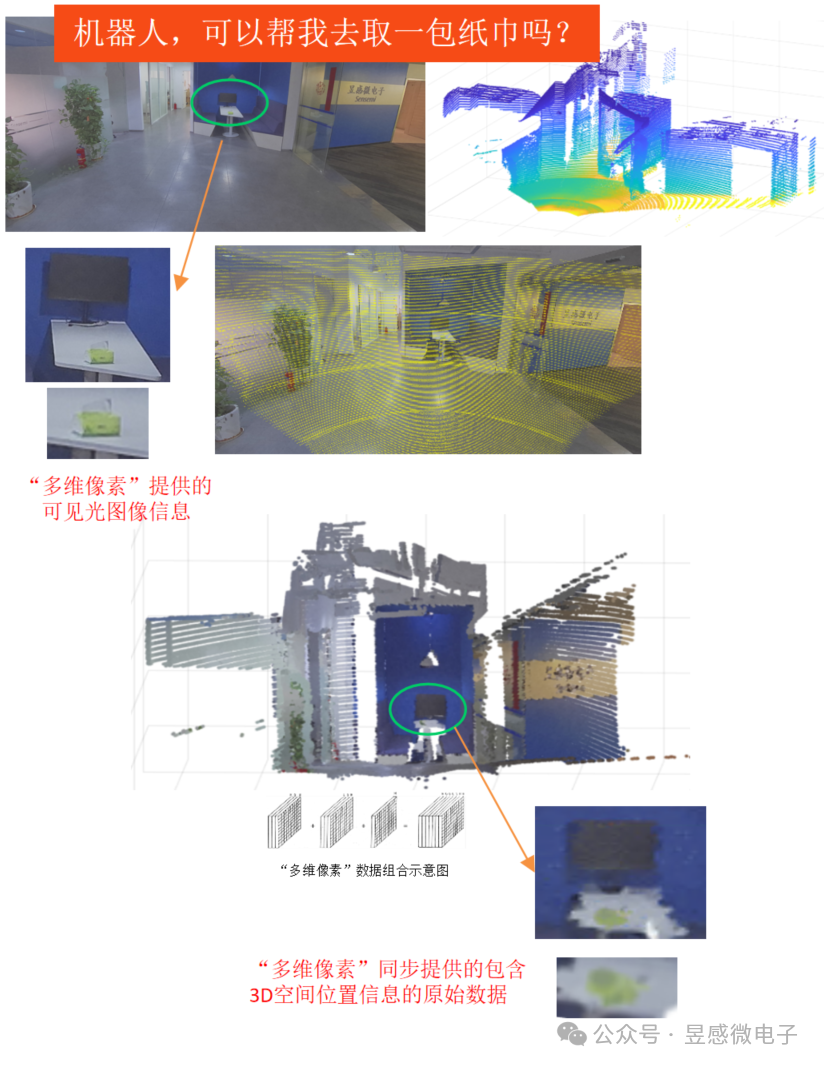
“攝像頭 + 激光雷達”組合輸出的“多維像素”圖像“多模態多維感知”的單幀”多維像素”原始數據 - 3D空間效果展示
值得注意的是,上方視頻是沒做任何數據插值處理的單幀原始數據的多模態信息輸出效果,已經完整地可以展示出周圍環境和目標,并且包含了環境里的所有細節。例如在桌面上的紙巾,通過“多維像素”提供的可見光信息和3D空間位置信息的原始數據,機器視覺可以精準地識別和定位到紙巾的位置。“多維像素”提供的多模態語義信息之豐富可以為任何需要智能感知的客戶提供其所需要的感知信息。
目前,昱感微正與某智能汽車平臺客戶合作數據采集車項目。我們在采集車的車頂上安裝了昱感微“超級攝像頭”,將道路上的各種狀況轉化為目標與環境“多模態語義”精準信息,助力中國車企累積數據優勢,實現彎道超車。

-
傳感器
+關注
關注
2577文章
55392瀏覽量
793414 -
攝像頭
+關注
關注
61文章
5110瀏覽量
103434 -
激光雷達
+關注
關注
982文章
4524瀏覽量
196987
發布評論請先 登錄
自動駕駛攝像頭像素如何影響算力?

樂鑫發布首個 MCU 級 Matter 攝像頭方案,啟明云端樂鑫代理

自動駕駛汽車如何依靠攝像頭判斷距離?

ESP32-S3在初始化攝像頭時檢測到攝像頭模組型號不被支持
樂鑫科技發布首個MCU級Matter攝像頭解決方案
【智駕芯時代】希荻微PMIC產品為車載攝像頭模組注入“芯”動能
自動駕駛既然有雙目攝像頭了,為什么還要三目攝像頭?

車載雙目攝像頭如何“看見”世界?


紅外攝像頭模組是什么?科技時代的眼睛

IPC監控攝像頭與邊緣計算盒子:選購安裝全攻略

【EASY EAI Orin Nano開發板試用體驗】--USB攝像頭使用
AKOOL發布全球首款實時攝像頭
基于RK3576開發板的網絡攝像頭方案




 工商網監
工商網監
評論