 CPU與FPGA視覺算法產品應用案例
CPU與FPGA視覺算法產品應用案例

機器視覺在工業自動化系統中的應用已經有一定的歷史,它取代了傳統的人工檢查,提高了生產質量和產量。 我們已經看到了相機在計算機、移動設備和汽車等日常生活設備中的迅速普及,但是機器視覺的最大進步莫過于處理能力。
隨著處理器的性能以每兩年翻一番的速度不斷提升,以及多核CPU和FPGA等并行處理技術日益受到關注,視覺系統設計人員現在可以應用復雜的算法來可視化數據,并創建出更加智能的系統。
性能的提高意味著設計人員可以獲得更高的數據吞吐量,從而實現更快速的圖像采集,使用更高分辨率的傳感器,并充分利用市場上具有最高動態范圍的一些新款相機。性能的提高不僅可讓設計人員更快速地采集圖像,而且還能更快速地處理圖像。預處理算法(如閾值和濾波)或處理算法(如模式匹配)也可以更快速地執行。最終設計人員能夠比以往更快地基于可視化數據制定決策。
德州奧斯汀NI總部數據采集和控制產品市場經理,主要負責機器視覺領域的Brandon Treece認為,隨著視覺系統越來越多地集成最新一代多核CPU和強大FPGA,視覺系統設計人員需要了解使用這些處理元件的好處和得失。他們不僅需要在正確的硬件上運行正確的算法,還需要了解哪些架構最適合作為其設計的基礎。
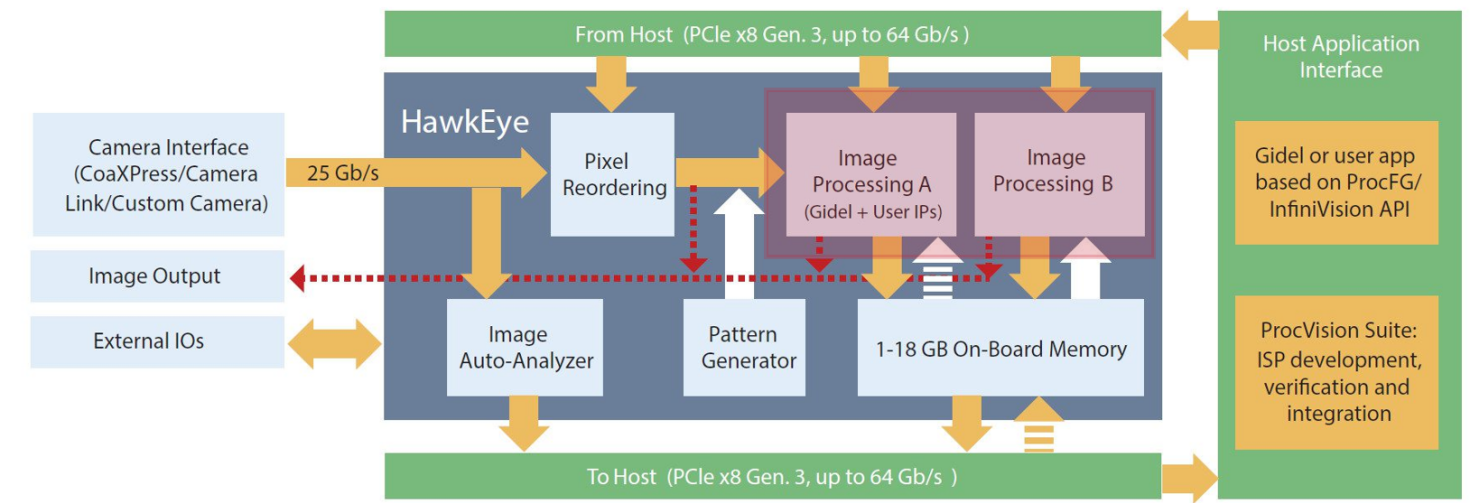
1內聯處理和協處理在研究哪種類型的算法最適合哪個處理元件之前,您應該了解每個應用最適合的架構類型。在開發基于CPU和FPGA的異構架構的視覺系統時,需要考慮兩個主要的使用情況: 嵌入式處理和協處理。
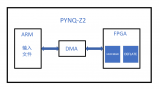
如果是FPGA協處理,FPGA和CPU將共同工作,共享處理負載。這種架構最常用于GigE Vision和USB3 Vision相機,因為它們的采集邏輯最好是在CPU上實現:
您可以使用CPU采集圖像,然后通過直接存儲器訪問(DMA)將其發送到FPGA,以便FPGA可以執行諸如濾波或顏色平面提取等操作。然后,您可以將圖像發送回CPU以進行更高級的操作,例如光學字符識別(OCR)或模式匹配。
在某些情況下,您可以在FPGA上實現所有的處理步驟,并只將處理結果發送回CPU。這使得CPU可以將更多的資源用于運動控制、網絡通信和圖像顯示等其他操作。
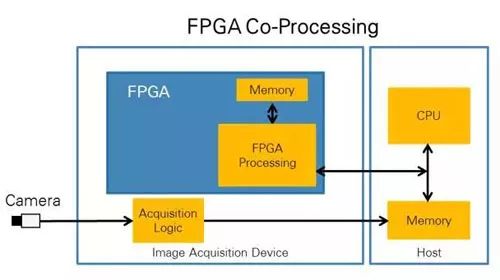
圖1.在FPGA協處理中,圖像使用CPU進行采集后,通過DMA發送到FPGA,然后由FPGA對圖像進行處理。
在嵌入式FPGA處理架構中,您可以將相機接口直接連接到FPGA的引腳,以便像素可直接從相機發送到FPGA。這種架構通常與Camera Link相機一起使用,因為它們的采集邏輯易于使用FPGA上的數字電路來實現。 這個架構有兩個主要的好處:
首先,與協處理一樣,在FPGA上執行預處理功能時,可以使用嵌入式處理將部分工作從CPU轉移到FPGA。例如,在將像素發送到CPU之前,可以在FPGA上執行高速預處理,如濾波或閾值處理。這也減少了CPU必須處理的數據量,因為CPU上的邏輯只需捕獲感興趣區域的像素,這最終提高了整個系統的吞吐量。
這種架構的第二個好處是可以在不使用CPU的情況下直接在FPGA內進行高速控制操作。FPGA是控制應用的理想選擇,因為它們可以提供非常快速且高度確定的循環速率。其中一個例子就是高速分類,其中FPGA向執行器發送脈沖,當脈沖通過執行器時,執行器會對零件進行剔除或分類操作。
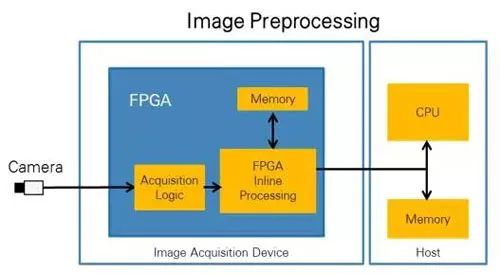
圖2.在嵌入式FPGA處理架構中,您可以將相機接口直接連接到FPGA的引腳,以便像素可直接從相機發送到FPGA。
2CPU與FPGA視覺算法在對構建異構視覺系統的不同方式有了基本了解,您可以看一下在FPGA上運行的最佳算法。 首先需要了解CPU和FPGA的工作原理。 為了解釋這一概念,我們假設一個理論算法可對圖像執行四個不同的操作,然后看一下這四個操作部署到CPU和FPGA上時分別是如何運行的:
CPU按順序執行操作,因此第一個操作必須在整個圖像上運行結束后,第二個操作才能啟動。在本例中,假設算法中的每個步驟在CPU上運行需要6ms; 因此,總處理時間是24ms。
現在考慮在FPGA上運行相同的算法。由于FPGA本質上是大規模并行的,所以該算法中的四個操作可以同時對圖像中的不同像素上操作。這意味著接收第一個處理的像素僅需2ms的時間,處理整個圖像需要4ms的時間,因而總處理時間為6ms。這比CPU的執行速度快得多。
即使使用FPGA協處理架構并將圖像傳輸到CPU,整個處理時間(包括傳輸時間)也比單獨使用CPU要短得多。
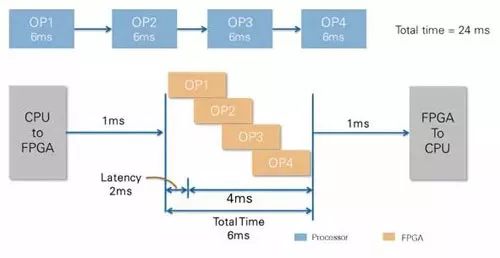
圖3.由于FPGA在本質上是大規模并行的,因此相比CPU,可顯著性能提升。
現在考慮一個真實的例子,比如粒子計數所需的圖像。
首先需要應用卷積濾鏡來銳化圖像。
接下來,通過閾值運行圖像以生成二進制圖像。這不僅可以通過將其從8位單色轉換為二進制來減少圖像中的數據量,還可以為二進制形態學應用準備圖像。
最后一步是使用形態學來應用關閉功能。 這會去除二進制粒子中的任何孔。
如果僅在CPU上執行上述算法,則必須在閾值步驟開始之前完成整個圖像的卷積步驟。使用NI公司面向LabVIEW的視覺開發模塊(Vision Development Module)和基于Xilinx Zynq-7020全可編程SoC的cRIO-9068 CompactRIO控制器時,執行上述算法需要的時間為166.7ms。
但是,如果在FPGA上運行相同的算法,則可以并行執行每個步驟。在FPGA上運行相同的算法只需8ms即可完成。請記住,8ms的時間中包括將圖像從CPU發送到FPGA的DMA傳輸時間,以及算法完成的時間。在某些應用中,可能需要將處理后的圖像發回到CPU,以供應用中的其他部分使用。如果加上這個時間的話,整個過程也只需8.5ms。總的來說,FPGA執行這個算法要比CPU快20倍。
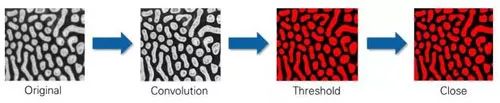
圖4:使用FPGA協同處理架構運行視覺算法,性能比僅用CPU運行同樣的算法提高了20倍。
3那么,為什么不在FPGA上運行每個算法呢?盡管FPGA比CPU更有益于視覺處理,但是要享受這些優勢也要做出一定的權衡。例如,考慮CPU與FPGA的原始時鐘頻率。FPGA的時鐘頻率在100~200MHz數量級。很顯然,FPGA的時鐘頻率低于CPU的時鐘頻率,CPU可以輕松地在3GHz或更高的頻率下運行。因此,如果一個應用需要一種必須迭代運行的圖像處理算法,并且不能利用FPGA的并行性,那么CPU能夠更快地進行處理。
前面討論的示例算法在FPGA上運行可以獲得20倍的速度提升。該算法中的每個處理步驟同時對各個像素或一組像素進行操作,因此該算法可以利用FPGA的并行優勢來處理圖像。 然而,如果算法使用諸如模式匹配和OCR這樣的處理步驟,這些要求立即分析整個圖像,這時候FPGA的優勢就比較勉強了。這是由于缺少處理步驟的并行化,以及需要大量內存進行圖像與模板之間的比對分析。
雖然FPGA可以直接訪問內部和外部存儲器,但通常情況下,FPGA可用的存儲器數量遠不及CPU可用的數量,或是這些處理操作所需的數量。
4克服編程復雜性FPGA用于圖像處理的優勢,取決于每種應用要求,包括應用的特定算法、延遲或抖動要求、I/O同步和功耗等因素。通常使用具有FPGA和CPU的架構,能充分利用FPGA和CPU各自的優勢,并且在性能、成本和可靠性方面都具有競爭優勢。然而,實現基于FPGA的視覺系統面臨的最大挑戰之一是克服FPGA的編程復雜性。
視覺算法開發本質上是一個迭代過程。完成任何一項任務都必須嘗試多種方法。大多數情況下,需要確定的不是哪種方法可行,而是哪種方法最好,而“最好方法”的判定則因應用的不同而不同。例如,對于某些應用而言,速度至關重要;而對于另一些應用,則更看重準確度。至少,需要嘗試幾種不同的方法才能為特定應用找到最好的方法。
為了實現生產率的最大化,不論使用哪種處理平臺,都需要立即獲得關于算法的反饋和基準測試信息。當使用迭代探索性方法時,實時查看算法結果將會節省大量時間。什么是正確的閾值?用二進制形態濾波器剔除的顆粒多大或多小? 哪種圖像預處理算法和算法參數可以最好地清理圖像? 這些都是開發視覺算法時的常見問題,而關鍵在于是否能夠更改并快速查看結果。然而,傳統的FPGA開發方法可能會減緩創新,因為算法的每個設計變化之間需要編譯時間。克服這一點的一個方法是使用一個算法開發工具,可讓您在同一個環境進行CPU和FPGA的開發工作,而不會在FPGA編譯時陷入困境。NI Vision Assistant是一種算法工程工具,用于開發部署到CPU或FPGA上的算法,以幫助您簡化視覺系統設計。您還可以使用Vision Assistant在目標硬件上編譯和運行之前測試算法,同時輕松訪問吞吐量和資源利用率信息。
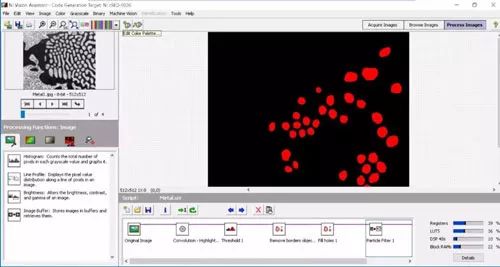
圖5. 在具有集成基準測試的FPGA硬件上使用基于配置的工具開發算法,可減少等待代碼編譯的時間,從而提高了開發速度。
因此在考慮誰更適合進行圖像處理時,CPU還是FPGA?答案是“視情況而定”。您需要了解應用的目標,才能使用最適合該設計的處理元件。但是,不管是什么應用,基于CPU或FPGA的架構及其固有的優勢都可以將機器視覺應用的性能提升一個等級。
-
FPGA
+關注
關注
1660文章
22412瀏覽量
636344 -
cpu
+關注
關注
68文章
11279瀏覽量
225007 -
視覺算法
+關注
關注
0文章
33瀏覽量
5957
原文標題:CPU vs FPGA,圖像處理誰更厲害?
文章出處:【微信號:mcuworld,微信公眾號:嵌入式資訊精選】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
雙目立體視覺相機產品介紹

瑞為技術蜻豚視覺大模型算法通過國家網信辦備案

新潔能NCE65TF099:高頻開關性能如何賦能不同產品應用?
極細同軸線在AI+FPGA視覺加速方案中的應用

基于FPGA的CLAHE圖像增強算法設計
25年11月上海FPGA算法實現與應用技術高級研修分享
FPGA 加持,友思特圖像采集卡高速預處理助力視覺系統運行提速增效
基于FPGA實現FOC算法之PWM模塊設計

基于Matlab與FPGA的雙邊濾波算法實現

基于FPGA的壓縮算法加速實現



 工商網監
工商網監
評論