 機器人關節模組為何選擇雙編碼器設計?
機器人關節模組為何選擇雙編碼器設計?

雙編碼器的作用
關節模組是機器人關節控制系統中的核心組件,決定了機器人的運動控制與動作精準度。在關節模組中,位置反饋和誤差校正是確保精確運動的關鍵,而雙編碼器設計正是為此而設計的。
具體而言,雙編碼器由絕對值編碼器和增量編碼器組成。絕對值編碼器負責提供精準的位置反饋,而增量編碼器則負責實時誤差校正。通過這兩者的協同工作,能夠顯著提升關節模組的精度和可靠性,確保機器人在復雜任務中的準確表現。
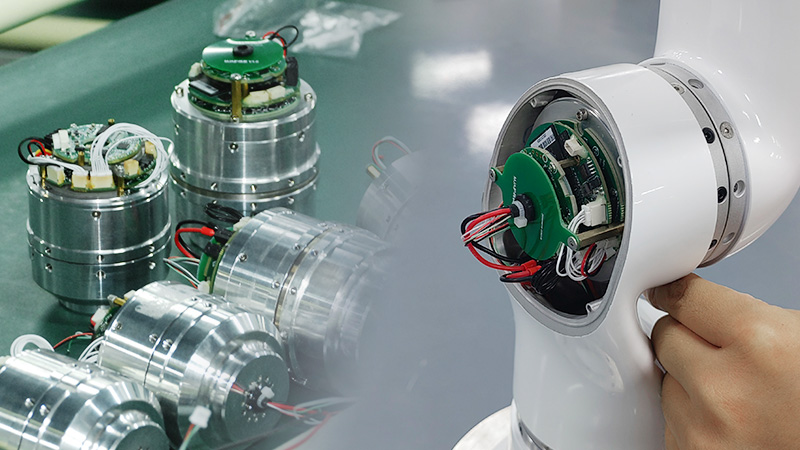 機器人關節模組
機器人關節模組雙編碼器設計的優勢
1. 提升精度與穩定性:
雙編碼器系統結合了絕對值編碼器的高精度位置反饋和增量編碼器的誤差校正功能,能確保機器人關節在運動中的每一步都準確無誤。即使在動態復雜的環境下,機器人也能保持高度精確的動作控制。
2. 增強機器人的可靠性:
雙編碼器設計不僅提高了精度,還提升了機器人的可靠性。如果其中一個編碼器發生故障,另一個編碼器可以及時檢測并進行校正,確保關節模組正常穩定的運行。
3. 提高抗干擾能力:
在復雜環境中,外界干擾可能影響機器人的穩定性。通過雙編碼器共同工作,能夠有效減弱干擾對關節運動的影響,確保機器人能夠穩定運行,保持高效性能。
綜上所述,關節模組采用雙編碼器設計,核心目的是為了實現位置反饋和誤差校正,從而提升機器人的精度、穩定性和抗干擾能力。雙編碼器的組合不僅讓機器人在精密操作中表現更加出色,還為關節模組提供長期的可靠性保障。因此,雙編碼器設計已經成為先進機器人關節模組的標配,助力機器人在各種復雜應用場景中發揮最佳性能。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31074瀏覽量
222189 -
編碼器
+關注
關注
45文章
3953瀏覽量
142617 -
絕對值編碼器
+關注
關注
3文章
71瀏覽量
10620 -
多關節
+關注
關注
0文章
3瀏覽量
681
發布評論請先 登錄
相關推薦
熱點推薦
機器人如何選擇編碼器方案?
的位置和狀態?這個時候就需要用到編碼器了。在機器人系統中,編碼器是實現精確運動的核心傳感器,典型的人形機器人上,14個旋轉
HCTL-2020 解碼器及其在多關節機器人運動控制中的應用
HCTL-2020 解碼器及其在多關節機器人運動控制中的應用編碼器位置檢測通道的擴展是多軸運動控制系統開發中經常遇到的技術問題。該文詳細介紹了HCTL -2020 解碼
發表于 12-17 16:12
工業機器人的末端關節旋轉該精確控制?
基本一致,只是大小不太一樣,例如iiwa的每個軸基本都是下圖這樣:每一個關節中都包含了電機、伺服驅動、諧波減速器、電機端編碼器、關節端位置傳感器
發表于 11-01 11:08

泰科智能MJX系列關節模組助力機器人彈鋼琴
模組自重輕,體積小,采用高精度雙編碼器,重復定位精度可達±0.015°,平均負載轉矩可達30 N.m,并內置抱閘,可以瞬間進行安全制動。使用此系列關節

編碼器在機器人系統中的應用
隨著科技的飛速發展,機器人技術已廣泛應用于工業、醫療、服務等多個領域。在機器人系統中,編碼器作為核心的位置和速度檢測裝置,發揮著至關重要的作用。本文將從編碼器的原理、分類及其在
編碼器在機器人技術中的應用 編碼器在傳感器系統中的作用
測量機器人位置和移動的裝置,它能夠將機器人位置和運動轉化為數字信號,以供機器人控制系統使用。編碼器在機器人技術中的應用主要體現在以下幾個方面
MT6701絕對式磁編碼器優化機器人關節伺服控制
在當今科技飛速發展的時代,機器人已經廣泛應用于工業制造、物流配送、醫療服務等眾多領域。而機器人關節伺服控制作為機器人運動的關鍵技術,其性能的優劣直接影響著
集成多摩川磁性編碼器的伺服電機與機器人關節設計創新
起著決定性作用。今天,我們就來聊聊集成多摩川磁性編碼器的伺服電機與機器人關節的設計創新,這可是機器人領域里的一項大突破!
基于MT6816單芯片磁編碼的機器人關節模組一體化設計
隨著機器人技術的快速發展,關節模組的性能直接決定了機器人的運動精度和響應速度。傳統的光電編碼器雖然精度較高,但在抗污染、抗振動等方面存在明顯
昆泰芯高速磁編碼器實現機器人關節雙端測量?
昆泰芯KTM59/KTH71系列磁編碼器憑借高精度(24位分辨率)、高速響應與強抗干擾能力,為機器人關節提供雙端角度檢測,實現從動力輸入到動作輸出的全鏈路精準控制。





 工商網監
工商網監
評論