") “蘿卜快跑”自動(dòng)駕駛技術(shù),奪走了誰的方向盤?
“蘿卜快跑”自動(dòng)駕駛技術(shù),奪走了誰的方向盤?

?
在前幾年,科幻電影中無人駕駛車自如地穿梭在城市大街小巷的場(chǎng)景,似乎還遙不可及,然而,隨著“蘿卜快跑”無人駕駛車輛在多個(gè)城市的成功運(yùn)營,這一愿景已悄然變?yōu)楝F(xiàn)實(shí)。由百度Apollo傾力打造的“蘿卜快跑”,以卓越的自動(dòng)駕駛技術(shù)和高效的服務(wù),正在逐步改變?nèi)藗兊某鲂蟹绞剑瑯?biāo)志著智能交通新時(shí)代的到來。
01 技術(shù)突破 自動(dòng)駕駛汽車的核心
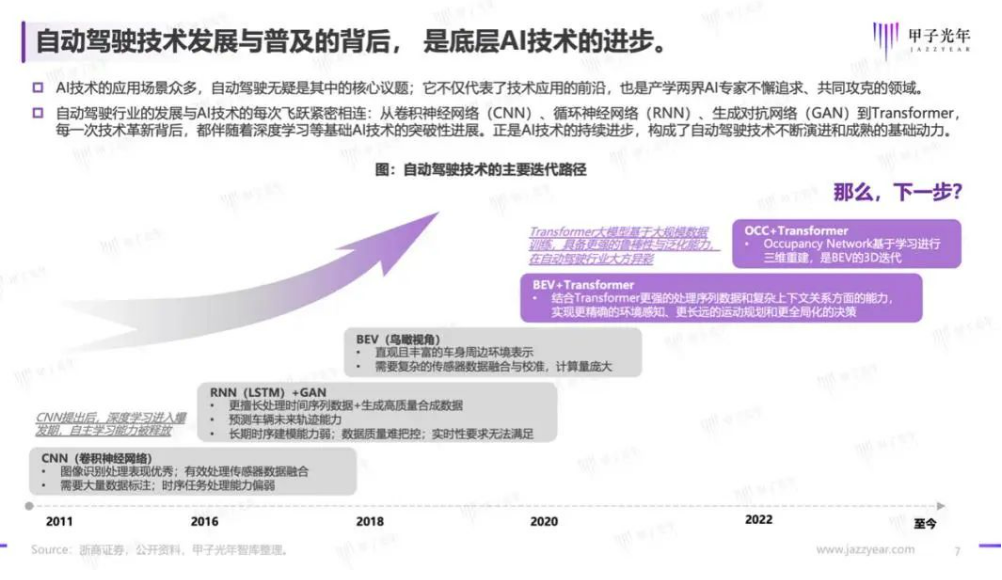
“蘿卜快跑”無人駕駛車憑借先進(jìn)的傳感器、強(qiáng)大的算法和深度學(xué)習(xí)能力,能夠精準(zhǔn)感知周圍環(huán)境,實(shí)時(shí)做出決策,安全、高效地完成行駛?cè)蝿?wù)。這種無人駕駛技術(shù)的背后,是人工智能對(duì)海量數(shù)據(jù)的分析和處理,以及對(duì)復(fù)雜場(chǎng)景的模擬和預(yù)測(cè)。

技術(shù)的關(guān)鍵組成部分包含但不限于:
- 感知系統(tǒng):使用激光雷達(dá)、攝像頭、雷達(dá)和超聲波傳感器等,來感知周圍環(huán)境,生成高精度的三維地圖,識(shí)別和分類周圍環(huán)境中的物體。
- 定位與地圖:結(jié)合高精度地圖和定位系統(tǒng),實(shí)現(xiàn)厘米級(jí)的實(shí)時(shí)定位,高精度地圖包含詳細(xì)的道路信息、車道標(biāo)識(shí)、交通標(biāo)志等。
- 決策與規(guī)劃:通過路徑規(guī)劃、行為預(yù)測(cè)和決策規(guī)劃,生成具體的駕駛動(dòng)作,如加速、剎車、轉(zhuǎn)向等,以確保安全行駛。
- 控制系統(tǒng):包括縱向控制和橫向控制,以及綜合控制來協(xié)調(diào)車輛的加速、減速和轉(zhuǎn)向,實(shí)現(xiàn)平穩(wěn)駕駛。
- 人工智能與機(jī)器學(xué)習(xí):深度學(xué)習(xí)用于圖像識(shí)別、目標(biāo)檢測(cè)和分類,強(qiáng)化學(xué)習(xí)用于優(yōu)化決策和控制策略。
- 數(shù)據(jù)通信:車聯(lián)網(wǎng)技術(shù)實(shí)現(xiàn)車輛與其他車輛及基礎(chǔ)設(shè)施的通信,云計(jì)算提供實(shí)時(shí)數(shù)據(jù)處理和分析支持。
- 安全性與冗余設(shè)計(jì):包括冗余系統(tǒng)和安全算法,確保在某個(gè)系統(tǒng)失效時(shí),車輛仍能安全運(yùn)行。
02 社會(huì)影響 就業(yè)轉(zhuǎn)型與行業(yè)重塑
無人駕駛車輛的普及,對(duì)傳統(tǒng)司機(jī)群體構(gòu)成了直接沖擊。

蘿卜快跑”項(xiàng)目在多個(gè)城市運(yùn)營,已經(jīng)展示了無人駕駛車輛與傳統(tǒng)交通服務(wù)的競(jìng)爭(zhēng)態(tài)勢(shì)。這不僅影響了出租車司機(jī)的生計(jì),也對(duì)貨車司機(jī)和其他依賴駕駛技能的職業(yè)產(chǎn)生了影響。
但正如歷史上的每一次技術(shù)革命,新技術(shù)也催生了新的就業(yè)機(jī)會(huì)。對(duì)于那些渴望投身于智能交通和人工智能領(lǐng)域的專業(yè)人士而言,這是一個(gè)充滿機(jī)遇的時(shí)代。新興的行業(yè)需要大量具備人工智能技能的人才,從數(shù)據(jù)科學(xué)家到軟件工程師,再到智能系統(tǒng)運(yùn)維專家,每一個(gè)環(huán)節(jié)都需要專業(yè)人員的支持,這是一次新的就業(yè)轉(zhuǎn)型機(jī)會(huì),抓住行業(yè)風(fēng)口,才能迎來職業(yè)的上升。
03 職業(yè)趨勢(shì) AI能力正成為職場(chǎng)關(guān)鍵競(jìng)爭(zhēng)力
面對(duì)這一行業(yè)趨勢(shì),教育也更應(yīng)匹配市場(chǎng)需求。
華清遠(yuǎn)見推出了全體系A(chǔ)I課程,旨在培養(yǎng)人工智能領(lǐng)域的專業(yè)人才。課程不僅涵蓋了從基礎(chǔ)知識(shí)到高級(jí)技能的全面內(nèi)容,更引入了虛擬仿真平臺(tái),讓學(xué)生在安全可控的環(huán)境中實(shí)踐操作,親身體驗(yàn)人工智能系統(tǒng)的構(gòu)建與優(yōu)化過程。
AI全體系課程
華清遠(yuǎn)見人工智能虛擬仿真為學(xué)習(xí)者精心打造了一套完整的學(xué)習(xí)路徑。
課程從基礎(chǔ)知識(shí)入手,逐步深入到高級(jí)應(yīng)用,按照基礎(chǔ)理論--核心課程--深度課程--進(jìn)階實(shí)戰(zhàn)的順序,涵蓋了數(shù)學(xué)基礎(chǔ)、編程語言、機(jī)器學(xué)習(xí)、深度學(xué)習(xí)、計(jì)算機(jī)視覺、自然語言處理、AI大模型、項(xiàng)目實(shí)戰(zhàn)等各個(gè)重要環(huán)節(jié)。
采用閉環(huán)式學(xué)習(xí)模式,結(jié)合成長理論和實(shí)踐操作,形成一體化的學(xué)習(xí)路徑。這種教學(xué)方法確保了學(xué)習(xí)者能夠循序漸進(jìn)地掌握知識(shí)點(diǎn),即使是基礎(chǔ)薄弱的學(xué)員也能通過系統(tǒng)的學(xué)習(xí),快速提升自己的能力。
教學(xué)團(tuán)隊(duì)致力于簡(jiǎn)化復(fù)雜概念,采用易于理解的教學(xué)方法,確保每位學(xué)員都能跟上進(jìn)度。完成課程后,學(xué)習(xí)者將能夠具備相當(dāng)于1-3年工作經(jīng)驗(yàn)者的專業(yè)水平,為投身人工智能行業(yè)做好充分準(zhǔn)備。
虛擬仿真平臺(tái)
該平臺(tái)致力于將人工智能的復(fù)雜技術(shù)體系變得易于理解和掌握,并通過創(chuàng)新的教學(xué)模式,為AI教育帶來全新的體驗(yàn)。
(1)創(chuàng)新可視化解析AI算法
虛擬仿真平臺(tái),將復(fù)雜的算法邏輯轉(zhuǎn)化為直觀的圖像和交互式模型,學(xué)生可以通過拖拽組件、設(shè)置參數(shù)的方式構(gòu)建算法流程,直觀“看到”算法的工作原理和過程。
平臺(tái)提供實(shí)時(shí)反饋機(jī)制,學(xué)生可以即時(shí)看到算法執(zhí)行的結(jié)果,并通過調(diào)整參數(shù)觀察效果變化,加深理解。而且虛擬仿真平臺(tái)提供了無限次試錯(cuò)的機(jī)會(huì),讓學(xué)生能夠在模擬環(huán)境中自由探索和實(shí)踐,無需擔(dān)心真實(shí)系統(tǒng)中的風(fēng)險(xiǎn)和成本。
(2)代碼自動(dòng)生成,并可在線調(diào)試驗(yàn)證
Python代碼自動(dòng)生成,根據(jù)封裝好的組件自主學(xué)習(xí)代碼,代碼資源可以遷移到硬件平臺(tái)或虛擬場(chǎng)景中驗(yàn)證。平臺(tái)自帶常用的AI環(huán)境與庫,系統(tǒng)生成代碼后,可以在通用的IDE環(huán)境(如Jupyter、Pycharm)里調(diào)試驗(yàn)證,擺脫了環(huán)境安裝的煩惱,并且組件和代碼一一對(duì)應(yīng),原理與具體代碼對(duì)應(yīng),提升代碼能力。
(3)可遷移學(xué)習(xí)的3D應(yīng)用場(chǎng)景案例實(shí)戰(zhàn)教學(xué)
采用“3D應(yīng)用場(chǎng)景案例實(shí)戰(zhàn)”教學(xué)。邏輯與算法可接入系統(tǒng)里預(yù)設(shè)的3D場(chǎng)景中,實(shí)現(xiàn)可視化交互體驗(yàn),覆蓋從數(shù)據(jù)采集、標(biāo)注、模型訓(xùn)練、預(yù)測(cè)、部署到測(cè)試的整個(gè)項(xiàng)目周期,打造人工智能沉浸式實(shí)操環(huán)境。學(xué)生既能體驗(yàn)全鏈路落地實(shí)戰(zhàn)項(xiàng)目,填補(bǔ)理論與實(shí)踐之間的鴻溝,又能提高實(shí)際操作能力和解決問題的能力。
還可將程序通過編程接口API輕松部署到硬件平臺(tái),進(jìn)行遷移學(xué)習(xí),為AI基礎(chǔ)學(xué)習(xí)和可視化算法實(shí)踐提供強(qiáng)大的項(xiàng)目落地應(yīng)用平臺(tái)。

在這個(gè)人工智能盛行的時(shí)代,不想被取代的最佳策略就是成為引領(lǐng)者。投身人工智能領(lǐng)域,掌握未來的核心技能,讓AI成為工作的伙伴而非對(duì)手。學(xué)習(xí)人工智能,不僅是一種職業(yè)選擇,更是不被未來職場(chǎng)淘汰關(guān)鍵。
無人駕駛技術(shù)的興起,總的來說是科技進(jìn)步的體現(xiàn),面對(duì)新興科技,我們應(yīng)該擁抱變革,積極適應(yīng)新技術(shù)帶來的挑戰(zhàn)與機(jī)遇。無論是對(duì)于希望投身智能交通行業(yè)的學(xué)生,還是尋求轉(zhuǎn)型升級(jí)的職場(chǎng)人士,華清遠(yuǎn)見提供的全體系A(chǔ)I課程+虛擬仿真平臺(tái),無疑可以培養(yǎng)更多的人工智能專業(yè)人才,推動(dòng)無人駕駛技術(shù)的發(fā)展,迎接更智能和安全的未來出行。
為鼓勵(lì)更多人可以學(xué)好人工智能,華清遠(yuǎn)見特別推出為期五天的虛擬仿真平臺(tái)免費(fèi)體驗(yàn)活動(dòng)。在五天有效期內(nèi),不僅可以免費(fèi)收聽試講課程,還可以親身體驗(yàn)平臺(tái)的功能,感受體系化、系統(tǒng)化的教學(xué)優(yōu)勢(shì),以及虛擬仿真平臺(tái)帶來的沉浸式學(xué)習(xí)體驗(yàn)。
更多人工智能課程問題可以私信咨詢雯雯老師,也可以在文章下方留言,小編都會(huì)一一解答哦~
?
-
人工智能
+關(guān)注
關(guān)注
1817文章
50101瀏覽量
265499 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
793文章
14887瀏覽量
179964 -
蘿卜快跑
+關(guān)注
關(guān)注
0文章
42瀏覽量
1664
發(fā)布評(píng)論請(qǐng)先 登錄
百度蘿卜快跑攜手AutoGo啟動(dòng)阿布扎比全無人駕駛商業(yè)化運(yùn)營
百度蘿卜快跑獲得迪拜全無人駕駛測(cè)試許可
奧托立夫與Tensor聯(lián)合發(fā)布全球首款可折疊方向盤
蘿卜快跑將在瑞士推出自動(dòng)駕駛出行服務(wù)AmiGo
蘿卜快跑與Lyft達(dá)成戰(zhàn)略合作 在歐洲部署無人駕駛出行服務(wù)
豪恩汽電助力蘿卜快跑無人駕駛服務(wù)升級(jí)
蘿卜快跑接入U(xiǎn)ber,李彥宏:Robotaxi全面轉(zhuǎn)向純視覺
蘿卜快跑與Uber達(dá)成戰(zhàn)略合作
蘿卜快跑香港測(cè)試再擴(kuò)區(qū)
哪些技術(shù)確保蘿卜快跑自動(dòng)駕駛安全行駛?

蘿卜快跑在香港的自動(dòng)駕駛測(cè)試區(qū)域再擴(kuò)大
百度最新消息:蘿卜快跑在港自動(dòng)駕駛測(cè)試區(qū)再擴(kuò)大 百度智能云持續(xù)領(lǐng)跑中國大模型




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論