 哪些技術確保蘿卜快跑自動駕駛安全行駛?
哪些技術確保蘿卜快跑自動駕駛安全行駛?

[首發于智駕最前沿微信公眾號]今年武漢的端午和兒童節是在大雨中度過的,但是不妨礙家長們帶著各家的寶貝到大商場出游。晚上回家打車,夜晚大雨之中基本上每三輛網約車或者出租車后就有一輛蘿卜快跑出現。可見其普及程度。也可見雨夜行車沒有停止其運營。
圖天河機場外的蘿卜快跑,來自網絡
從乘客角度看蘿卜快跑,已經是完美的自動駕駛車輛了,沒有安全員,自己開車。除了速度慢一點之外,停車的頻率比有人出租車高一點外,也就是反應慢一點外其它幾乎完美。所謂反應慢,主要是市民們反映,無人駕駛車會出現一些不尋常的行為,比如無故停在馬路中央、轉彎時停滯不前、早晚高峰時車速過慢,加劇交通擁堵、造成安全隱患。
這種完美性使得自動駕駛技術界層出不窮日新月異的研究成果形成鮮明對比,已經如此完美,還在研究什么?
蘿卜快跑是有后臺遠程駕駛的,只不過比例不是一比一,而是一人看著三臺以上車,這既是法規要求,也是技術限制。

圖 5G遠程代駕艙,來自網絡

圖好像玩游戲一樣的遠程安全員,圖片來自網絡
自動駕駛的技術路線分為兩派,其中一派是以Waymo、特斯拉為代表的單車智能派,另一派則是以百度Apollo等自動駕駛公司為代表的車聯網協同發展。
早在2021年6月,更新的SAE自動駕駛分級標準中,也增加了遠程駕駛的定義,刪除了L4、L5級自動駕駛中“不需要干預”的說法。《北京市智能網聯汽車政策先行區無人化道路測試管理實施細則》將無人化道路測試“單車智能”與“遠程協助”相結合,默認了高階自動駕駛的云端安全員的存在。而百度是最早且頂格獲頒該細則的10張路測通知書的廠商。
一般來說,在以芯片技術,人工智能為代表的單車智能,目前暫時還是國外廠商占有優勢,而依賴車路協同的車聯網輔助駕駛,是彎道超車的一種策略。

遠程駕駛技術方案
蘿卜快跑的遠程駕駛方案采用“車-路-云”協同模式,結合5G通信、AI決策、遠程監控中心,確保無人駕駛車輛的安全運營。
1、車端硬件基礎
蘿卜快跑的自動駕駛車輛采用多傳感器融合方案,結合激光雷達、攝像頭、毫米波雷達和超聲波雷達,以實現L4級自動駕駛能力。典型車型(如Apollo RT6)的傳感器配置及功能說明:
| 傳感器類型 | 數量 | 主要功能 | 技術參數 |
| 激光雷達(LiDAR) | 4顆 | 360°環境建模,高精度障礙物檢測 | 128線,探測距離200米,點云密度153萬點/秒 |
| 攝像頭 | 12個 | 車道線識別、交通標志檢測、紅綠燈判斷 | 800萬像素,120°廣角,HDR支持 |
| 毫米波雷達 | 5個 | 遠距離目標檢測(如高速車輛),抗惡劣天氣(雨雪霧) | 77GHz,探測距離250米 |
| 超聲波雷達 | 12個 | 近距離障礙物檢測(泊車、低速場景) | 探測距離0.1-5米 |
傳感器配置總覽
1.1 傳感器布局與分工
激光雷達:車頂1顆主雷達(前向長距探測)+ 兩側各1顆補盲雷達(側向覆蓋)+ 后向1顆雷達(盲區消除)。
實現5×360°無死角感知,據說點云密度是Waymo車型的1.5倍。
攝像頭:前視(4個)、側視(4個)、后視(2個)、環視(2個),覆蓋200米內動態目標。
毫米波雷達:前向(3個)+ 側向(2個),與激光雷達數據互補,解決遮擋物檢測(如突然橫穿的行人)

圖 Apollo RT6售價,圖片來自網絡
這樣的傳感器配置,全車價格卻只是20w。
2.云端的遠程駕駛中心(Remote Monitoring Center, RMC)
功能是實時監控車輛狀態(位置、速度、傳感器數據)。
在極端場景(如突發事故、系統故障)下進行遠程干預。
提供AI輔助決策,減少人工干預頻率。
人員配置:2025年目標是1名遠程安全員可同時監控10輛車(2024年為1:3)。
采用AI預判+人工確認模式,降低人力成本。

圖蘿卜快跑的價格優勢,圖片來自網絡
3. 5G-V2X(車聯網)支持
低延遲通信(<20ms),確保遠程指令實時傳達。
冗余設計:雙5G模塊+衛星通信,防止網絡中斷。
4. 自動駕駛系統(L4級)
AI決策能力:99.9%的駕駛行為由車載AI自主完成,遠程干預率<0.1次/千公里。
極端天氣(暴雨、大雪)仍依賴遠程輔助。

圖遠程駕駛員接管蘿卜快跑的流程圖
百度并未披露AI預判的具體條件,但估計是門限方式,車輛任何狀態超過預設值就會觸發遠程接管請求。

幕后功臣骨干網backbone
遠程駕駛的核心是時延,需要就像坐在車里開車一樣反應快。一般要求信號時延小于50毫秒,這個數據實際上是筆者以前在hw做光網絡優化時的客戶指標,遠程駕駛一千公里信號時延小于50毫秒。
為什么是一千公里,為什么不把遠駕中心就近布置?因為車輛運營范圍分散太廣,不可能建設那么多遠程駕駛中心。所以完全可能出現遠程安全員在一個城市,車輛在另外一個城市的情形。
為什么不用基站直接無線多跳連接,不依賴光纖骨干網呢?因為成本和性能。
多跳需基站密集部署(間距≤500米),否則信號衰減導致性能驟降,而其特別容易受天氣影響。南方的朋友在陰雨天會發現家里的wifi不穩定,因為空氣濕度也會干擾無線信號。
原來我們內部的玩笑話,要讓無線通信又有距離又有流量還穩定,只能用個衛星鍋直接對準接收方,而且距離最多幾百米。
所以基站主要是與自己范圍內接入的設備通信,比如手機,比如車輛,通信,而不是與其它基站直接通信。遠程信息通信依賴光纖骨干網,基站只是局部接入的媒介,可以視作骨干網的“熱點”。
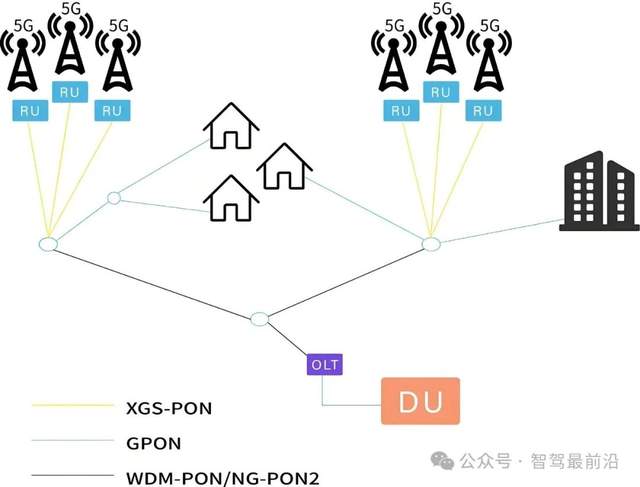
圖光纖骨干網與基站的協同工作,圖片來自網絡
華為在光網絡中,基于智能光網絡 ASON(Automatically Switched Optical Network)技術,會對業務路徑進行分級,常見的有鉆石級、金級、銀級、銅級和鐵級。以華為 OSN3500 設備為例,其具體情況如下:
鉆石級業務:通常提供最高級別的服務質量和保護機制。這類業務可能具有專用的光纖路徑,在網絡資源分配上具有最高優先級,能夠保證極低的時延、抖動和丟包率,同時具備最強的保護能力,如采用 1+1 路徑保護或多路由保護等方式,確保在任何情況下業務都能持續穩定傳輸,適用于對網絡可靠性和性能要求極高的關鍵業務,如金融交易、實時工業控制等。
金級業務:服務質量和保護水平略低于鉆石級。可能會采用相對靈活的資源分配方式,但仍能保證較高的傳輸質量和可靠性,例如提供一定程度的冗余保護或快速的故障恢復機制,適用于對業務連續性有較高要求的企業核心業務或重要數據傳輸。
銀級業務:提供中等水平的服務質量。在網絡資源充足時能滿足業務的正常傳輸需求,但在資源緊張時可能會受到一定影響,保護機制相對較弱,如采用簡單的鏈路保護或有限的重路由機制,適用于一般性的企業業務或對成本較為敏感的業務。
銅級業務:服務質量和保護等級相對較低。主要側重于滿足基本的業務連通性需求,在網絡擁塞時可能會被優先犧牲,以保障更高級別業務的正常運行,通常適用于對網絡性能要求不高的非關鍵業務,如普通辦公網絡中的文件傳輸、網頁瀏覽等。
鐵級業務:是最低等級的業務類型,一般僅提供盡力而為的服務。網絡資源分配和保護機制最少,在網絡出現故障或擁塞時,這類業務最容易受到影響甚至中斷,適用于對服務質量要求極低、可容忍一定中斷時間的業務,如某些后臺數據備份、非實時的監控數據傳輸等。
每一等級業務路徑的時延范圍如下:
鉆石級業務時延范圍通常能保證在極低的水平,一般端到端時延可控制在幾十微秒到毫秒級。鉆石級業務通常采用專用光纖路徑或高級保護方式,如 1 + 1 路徑保護等,網絡資源分配優先級最高。同時,華為的相關技術會采用極簡網絡架構設計,業務一跳直達,減少轉發節點,還可能使用智能拉曼放大器等先進技術,有效降低時延。
金級業務端到端時延一般在毫秒級到幾十毫秒之間。保護機制也較為完善,能較快完成倒換和重路由,但資源分配優先級略低于鉆石級。網絡架構和設備選型上也較為優質,能保障業務在較短時間內傳輸,但可能不像鉆石級那樣具備絕對的優先保障。
銀級業務時延通常在幾十毫秒到幾百毫秒之間。銀級業務在網絡資源充足時能正常傳輸,資源緊張時可能受影響。其保護機制相對較弱,如采用簡單的鏈路保護或有限的重路由機制,所以在出現故障或擁塞時,恢復時間可能較長,導致時延增加。
銅級業務時延不確定性較大,可能從幾百毫秒到數秒甚至更長。該等級業務在網絡擁塞或故障時,會被優先犧牲以保障高級別業務。其使用的網絡資源和保護措施較少,可能會經歷多次路由調整或等待資源釋放,從而導致時延較長且不穩定。
鐵級業務時延范圍沒有明確保障,可能出現幾秒甚至更長時間的延遲,也可能長時間中斷。作為盡力而為的服務等級,鐵級業務在網絡中的優先級最低,所分配到的資源和保護最少。在網絡繁忙或出現故障時,受到的影響最大,傳輸時延可能極高,甚至業務中斷。
可見蘿卜快跑的遠程駕駛和數據回傳,至少是銀級以上業務。
銀級以上業務的網絡費用是很貴的,隨著運營車輛越來越多(目前全國兩千多輛),網絡費用以及其他費用必然水漲船高。所以截至2024年第三季度,蘿卜快跑仍處于商業化初期,尚未實現整體盈利。百度自動駕駛業務部總經理陳卓公開表示,該業務“可能成為全球首個實現商業化盈利的自動駕駛平臺”,但需等待武漢等試點城市的運營突破。百度計劃2024年底在武漢實現收支平衡,2025年全面進入盈利期。武漢被視為首個可能盈利的區域。今年年底是否盈利,可以拭目以待。
審核編輯 黃宇
-
自動駕駛
+關注
關注
794文章
14953瀏覽量
181110 -
蘿卜快跑
+關注
關注
0文章
44瀏覽量
1742
發布評論請先 登錄
2026年自動駕駛汽車發展趨勢前瞻

百度蘿卜快跑攜手AutoGo啟動阿布扎比全無人駕駛商業化運營
百度蘿卜快跑獲得迪拜全無人駕駛測試許可
百度蘿卜快跑獲得阿布扎比全無人商業化運營許可
蘿卜快跑將在瑞士推出自動駕駛出行服務AmiGo
邊聊安全 | 以L3級自動駕駛為例,詳解DDT、DDT Fallback、MRC、MRM概念

蘿卜快跑與Lyft達成戰略合作 在歐洲部署無人駕駛出行服務
蘿卜快跑接入Uber,李彥宏:Robotaxi全面轉向純視覺
蘿卜快跑與Uber達成戰略合作
低速自動駕駛與乘用車自動駕駛在技術要求上有何不同?

蘿卜快跑香港測試再擴區
蘿卜快跑在香港的自動駕駛測試區域再擴大
百度最新消息:蘿卜快跑在港自動駕駛測試區再擴大 百度智能云持續領跑中國大模型




 工商網監
工商網監
評論