") 干貨!國(guó)產(chǎn)Cortex-A55人工智能實(shí)驗(yàn)箱機(jī)械臂跳舞實(shí)驗(yàn)案例
干貨!國(guó)產(chǎn)Cortex-A55人工智能實(shí)驗(yàn)箱機(jī)械臂跳舞實(shí)驗(yàn)案例

一、實(shí)驗(yàn)?zāi)康?/p>
本實(shí)驗(yàn)通過TL3568-PlusTEB教學(xué)實(shí)驗(yàn)箱修改機(jī)械臂不同舵機(jī)的角度,增加延遲時(shí)間,從而做到機(jī)械臂跳舞的效果。
二、實(shí)驗(yàn)原理
ROS(機(jī)器人操作系統(tǒng)),是專為機(jī)器人軟件開發(fā)所設(shè)計(jì)出來的一套電腦操作系統(tǒng)架構(gòu)。
ROS是一個(gè)開源的元級(jí)操作系統(tǒng)(后操作系統(tǒng)),提供類似于操作系統(tǒng)的服務(wù),包括硬件抽象描述、底層驅(qū)動(dòng)程序管理、共用功能的執(zhí)行、程序間消息傳遞、程序發(fā)行包管理,它也提供一些工具和庫用于獲取、建立、編寫和執(zhí)行多機(jī)融合的程序。
機(jī)械臂通過ROS機(jī)器人操控系統(tǒng),簡(jiǎn)化了6自由度串行總線舵機(jī)復(fù)雜運(yùn)動(dòng)控制,可實(shí)現(xiàn)機(jī)械臂正解、反解、運(yùn)動(dòng)規(guī)劃、機(jī)械碰撞檢測(cè)、夾取分揀等功能。
虛擬機(jī)(Virtual Machine)
機(jī)械臂由虛擬機(jī)生成控制決策,STM32控制器驅(qū)動(dòng)機(jī)械臂。
虛擬機(jī)(Virtual Machine)是指通過軟件模擬的具有完整硬件系統(tǒng)功能的、運(yùn)行在一個(gè)完全隔離環(huán)境中的完整計(jì)算機(jī)系統(tǒng)。
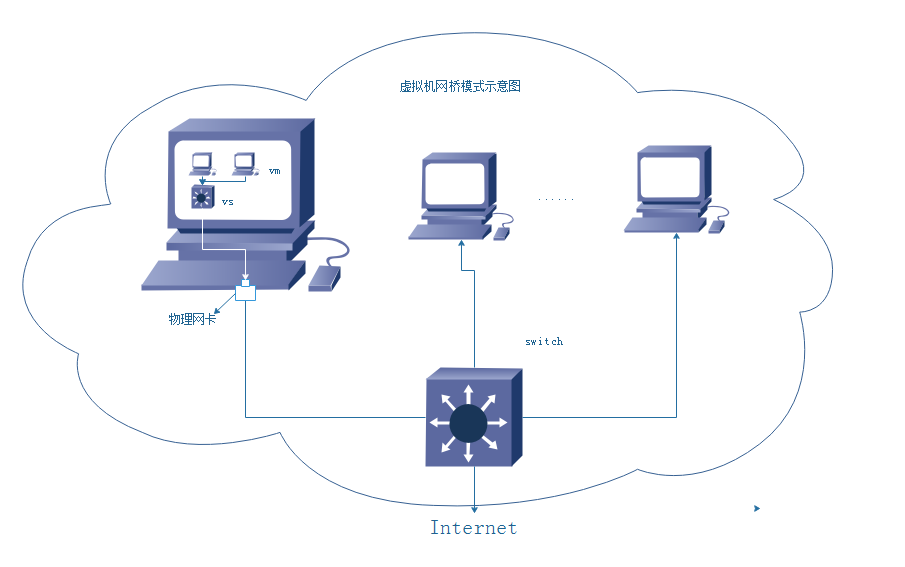
在計(jì)算機(jī)中創(chuàng)建虛擬機(jī)時(shí),需要將實(shí)體機(jī)的部分硬盤和內(nèi)存容量作為虛擬機(jī)的硬盤和內(nèi)存容量。
每個(gè)虛擬機(jī)都有獨(dú)立的CMOS、硬盤和操作系統(tǒng),可以像使用實(shí)體機(jī)一樣對(duì)虛擬機(jī)進(jìn)行操作。
機(jī)械臂自由度
機(jī)械手自由度,是指?jìng)魉蜋C(jī)構(gòu)機(jī)械手的運(yùn)動(dòng)靈活性。通常把傳送機(jī)構(gòu)的運(yùn)動(dòng)稱為傳送機(jī)構(gòu)的自由度。
人從手指到肩部共有27個(gè)自由度。而如將機(jī)械手的手臂也制成這樣多的自由度,既困難又不必要。
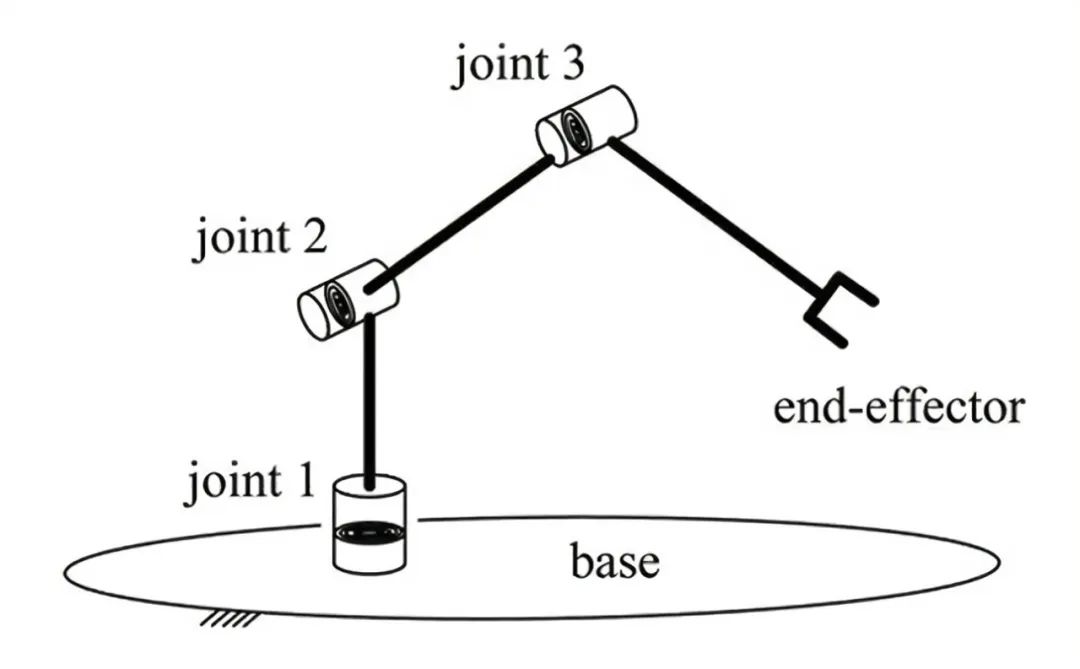
從力學(xué)的角度分析,物件在空間只有6個(gè)自由度。因此為抓取和傳送在空間不同位置和方位物件,傳送機(jī)構(gòu)也應(yīng)具有6個(gè)自由度。
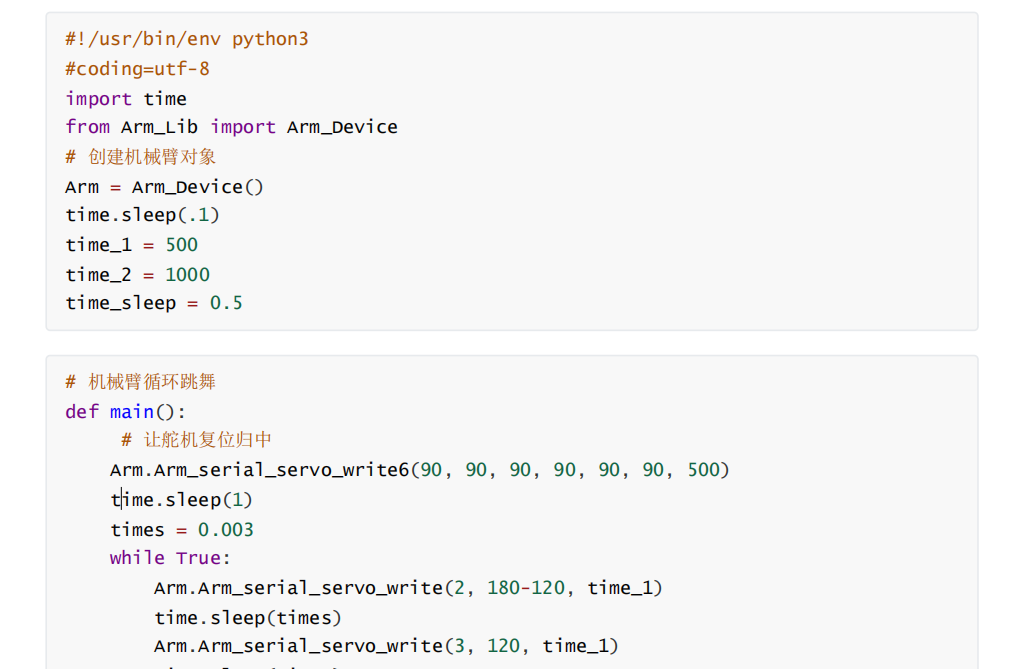
實(shí)驗(yàn)程序流程
1、創(chuàng)建機(jī)械臂對(duì)象
2、機(jī)械臂循環(huán)跳舞:讓舵機(jī)復(fù)位歸中
三、操作現(xiàn)象
人工智能實(shí)驗(yàn)箱重磅襲來!
基于 Cortex-A55 教學(xué)實(shí)驗(yàn)室建設(shè)方案
RK3568國(guó)產(chǎn)化高性能處理器
2.0GHz超高主頻
1T超高算力NPU

兼容鴻蒙等國(guó)產(chǎn)操作系統(tǒng)





多元化教學(xué)專業(yè)與課程
教學(xué)專業(yè) | 教學(xué)課程 |
人工智能 | 《人工智能》 |
自動(dòng)化 | 《嵌入式系統(tǒng)設(shè)計(jì)》 |
《ARM系統(tǒng)開發(fā)》 | |
計(jì)算機(jī)科學(xué)與技術(shù) | 《無線傳感器網(wǎng)絡(luò)》 |
光電信息工程 | 《移動(dòng)互聯(lián)網(wǎng)技術(shù)》 |
通信工程 | 《物聯(lián)網(wǎng)設(shè)計(jì)方法與應(yīng)用》 |
電子信息工程 |
嵌入式基礎(chǔ)實(shí)驗(yàn)
第一章
ARM實(shí)驗(yàn)環(huán)境搭建與Linux開發(fā)基礎(chǔ)
第二章
Linux 設(shè)備驅(qū)動(dòng)程序開發(fā)實(shí)驗(yàn)
第三章
Linux 設(shè)備驅(qū)動(dòng)程序開發(fā)實(shí)驗(yàn)
第四章
基于ARM基礎(chǔ)外設(shè)實(shí)驗(yàn)
第五章
Linux Qt 開發(fā)實(shí)驗(yàn)
第六章
Linux Python 開發(fā)實(shí)驗(yàn)
人工智能實(shí)驗(yàn)
第一章
Python基礎(chǔ)章節(jié)實(shí)驗(yàn)
第二章
圖像處理(Python OpenCV)實(shí)驗(yàn)
第三章
深度學(xué)習(xí)實(shí)驗(yàn)
第四章
機(jī)械學(xué)習(xí)實(shí)驗(yàn)
第五章
機(jī)器控制實(shí)驗(yàn)
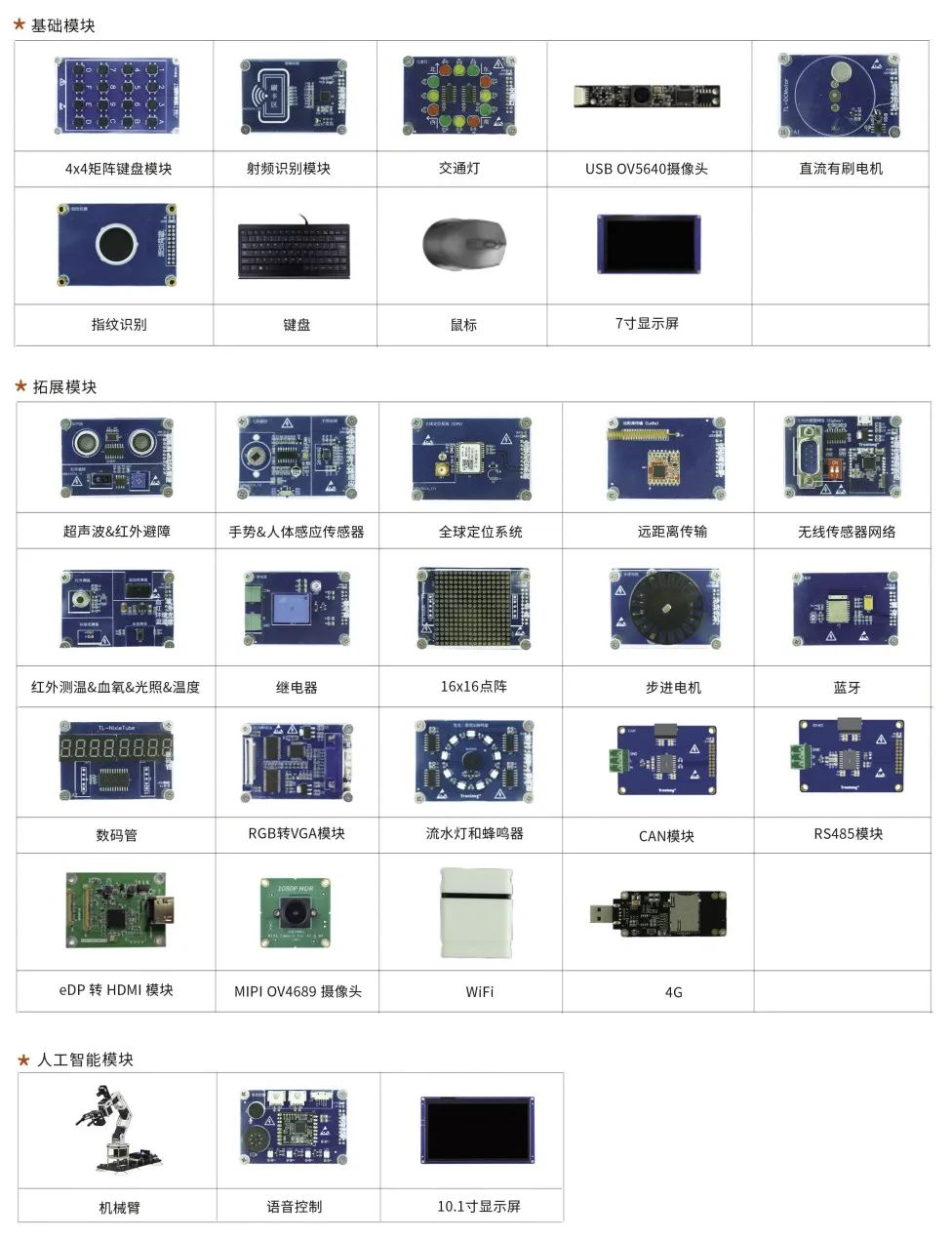
30+拓展模塊任意搭配
-
Cortex
+關(guān)注
關(guān)注
2文章
220瀏覽量
48942 -
人工智能
+關(guān)注
關(guān)注
1819文章
50193瀏覽量
266344 -
python
+關(guān)注
關(guān)注
58文章
4880瀏覽量
90212 -
機(jī)械臂
+關(guān)注
關(guān)注
14文章
597瀏覽量
26165
發(fā)布評(píng)論請(qǐng)先 登錄
云知聲榮膺量子位2025人工智能年度榜單四項(xiàng)大獎(jiǎng)
格靈深瞳榮獲量子位2025人工智能年度領(lǐng)航企業(yè)
挖到寶了!人工智能綜合實(shí)驗(yàn)箱,高校新工科的寶藏神器

挖到寶了!人工智能綜合實(shí)驗(yàn)箱,高校新工科的寶藏神器
挖到寶了!比鄰星人工智能綜合實(shí)驗(yàn)箱,高校新工科的寶藏神器!
2025人工智能十大趨勢(shì)

華清遠(yuǎn)見AI人工智能專業(yè)實(shí)驗(yàn)室建設(shè)方案,虛實(shí)融合,以產(chǎn)業(yè)應(yīng)用驅(qū)動(dòng)高校教學(xué)實(shí)訓(xùn)變革!

迅為RK3588開發(fā)板Linux安卓麒麟瑞芯微國(guó)產(chǎn)工業(yè)AI人工智能
華清遠(yuǎn)見AI人工智能專業(yè)實(shí)驗(yàn)室建設(shè)方案,以產(chǎn)業(yè)應(yīng)用驅(qū)動(dòng)高校教學(xué)實(shí)訓(xùn)變革!

人工智能實(shí)驗(yàn)室建設(shè)案例 | 沈陽工程學(xué)院—人工智能實(shí)驗(yàn)室

基于RK3588,飛凌教育品牌ElfBoard推出嵌入式人工智能實(shí)驗(yàn)箱EDU-AIoT ELF 2

【RK3588】嵌入式人工智能實(shí)驗(yàn)箱——智啟高校產(chǎn)教融合新平臺(tái)

【新品發(fā)布】嵌入式人工智能實(shí)驗(yàn)箱EDU-AIoT ELF 2正式發(fā)布

【RK3588新品】嵌入式人工智能實(shí)驗(yàn)箱EDU-AIoT ELF 2發(fā)布

全志T536(異構(gòu)多核ARMCortex-A55+玄鐵E907 RISC-V)工業(yè)核心板說明書



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論