 自動停車機器人,如何快速構建?
自動停車機器人,如何快速構建?

停車機器人是用于在停車場或車庫等場所中進行車輛的自動停放和取車操作。隨著智能交通和智能城市的發展,停車機器人在解決停車難、提高停車效率和減少停車空間浪費等方面具有廣闊的應用前景。

▲停車移動機器人現場作業
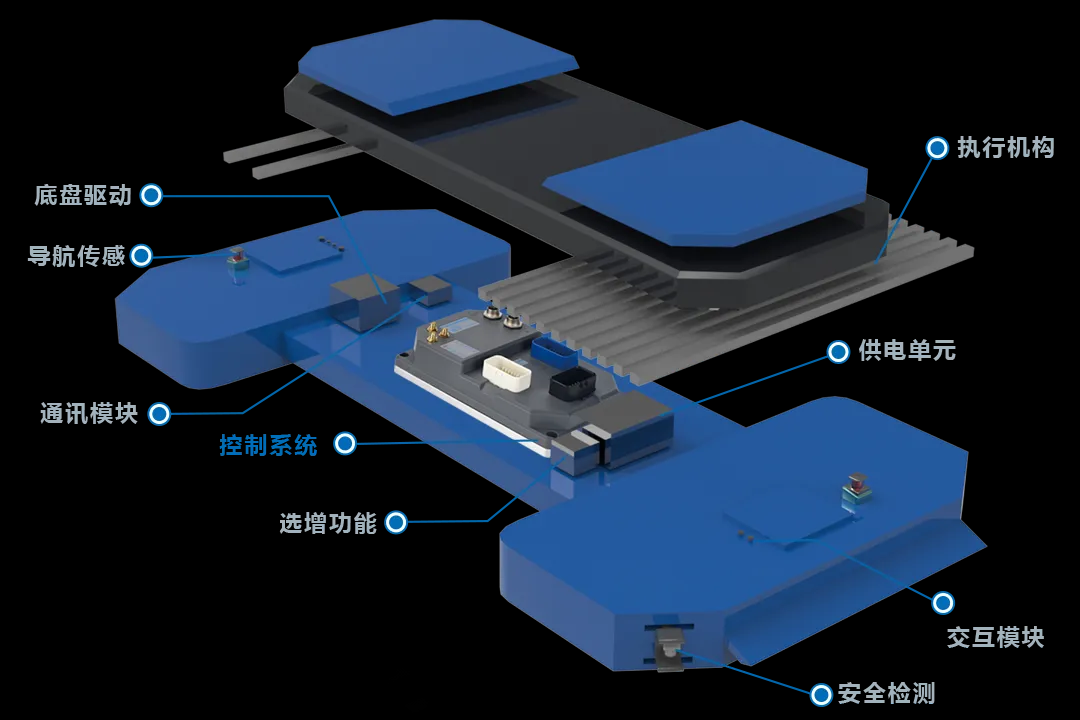
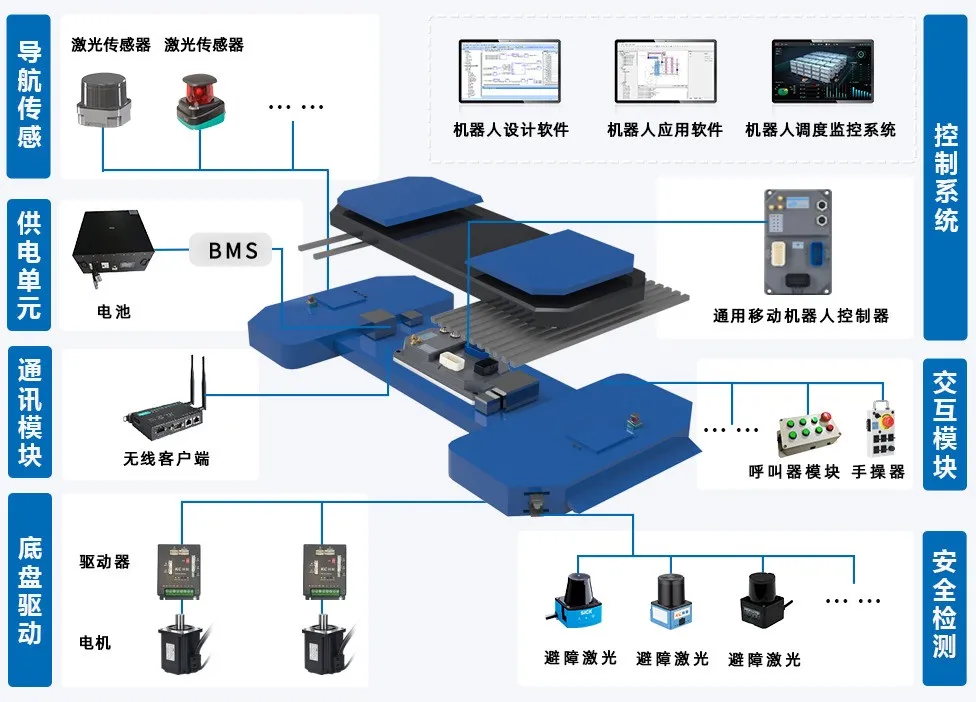
▲停車移動機器人構成
科聰停車機器人
解決方案 -KC SOLUTION
本方案中核心部分采用的是科聰通用移動機器人控制器,導航方式一般選擇激光導航,用以實現行駛路徑可靈活多變和高精度導航的需求。以通用移動機器人控制器為核心的整體解決方案已在停車機器人領域廣泛使用。
方案優勢
ADVANTAGE
體積緊湊
停車移動機器人相對普通移動機器人車型設計較薄,這對控制器的設計和安裝尺寸提出了更高的要求。科聰控制器設計緊湊,可方便安裝于任意款停車機器人。
高精度控制
停車機器人需具備高精度的停放,不可出現車輛剮蹭問題。在機器人本體精度支持下,科聰系列控制系統的精度可達到±5mm以內,確保停車準確無誤。
支持可拓展
可根據用戶需求進行功能定制,方便應對各類復雜場景,賦能停車機器人更具競爭力。
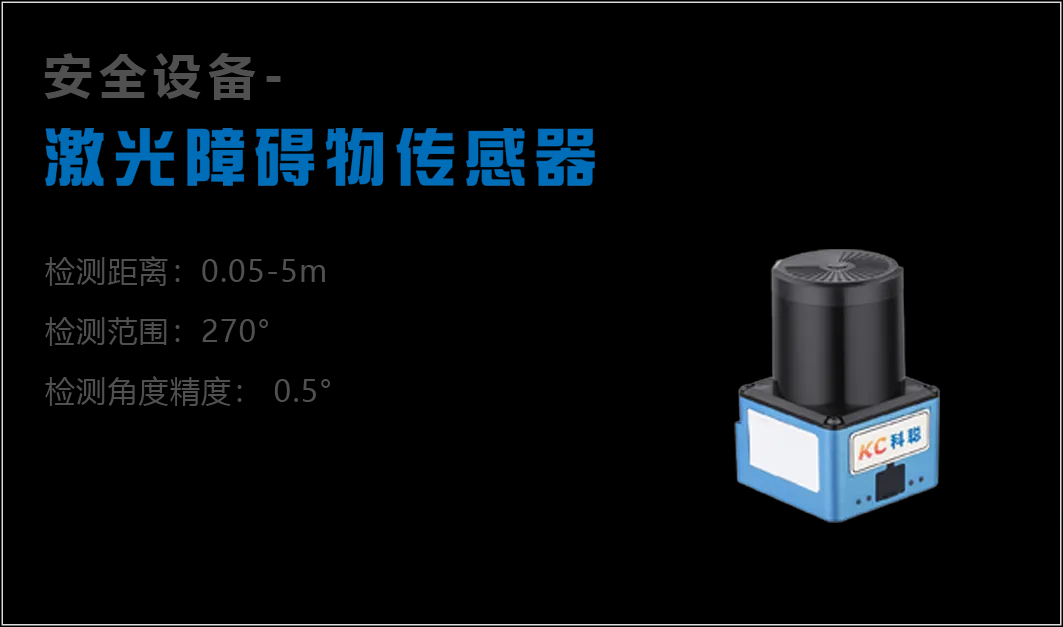
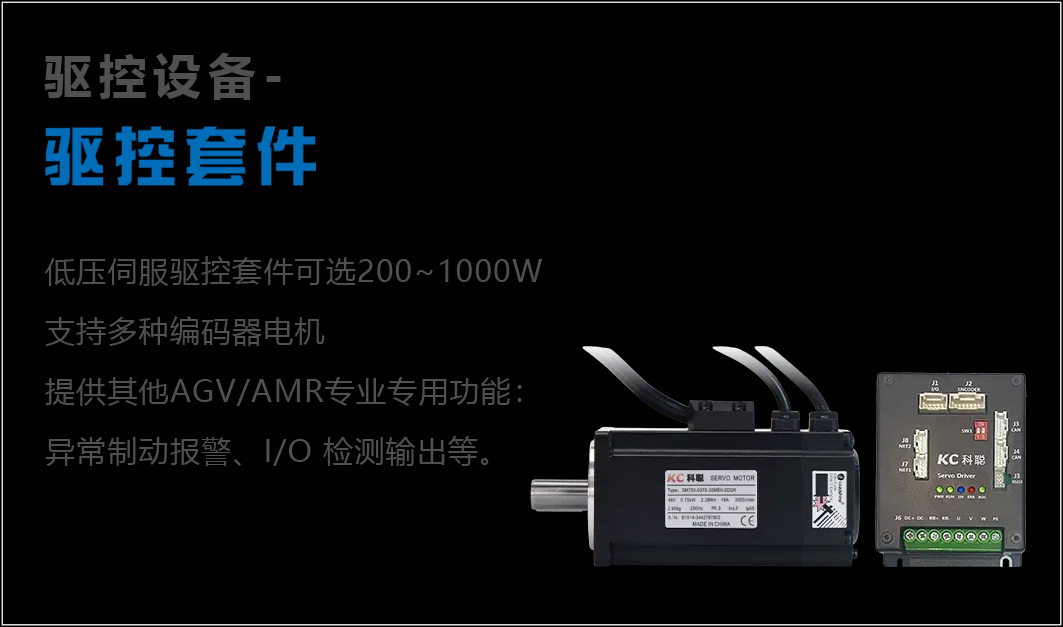
方案產品
SOLUTION PRODUCTS


審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31073瀏覽量
222174
發布評論請先 登錄
相關推薦
熱點推薦
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
校正方案,實時補償位置偏差與溫度漂移,顯著提升軌跡規劃精度與重復定位精度。
4. 模塊化系統集成方案
MYD-LT536 提供完整SDK、Linux 驅動與開發文檔,可快速構建機器人系統集成
發表于 11-14 15:48
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
。· 利用開發板上的MIPI CSI1和CSI2接口,完整接入8路攝像頭,實現了所有通道的視頻預覽與采集,為機器人構建了全方位的視覺感知系統。卓越性能表現:· CPU占用率:34%· DDR占用率:50
發表于 10-29 16:41
小蘿卜機器人的故事
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發表于 10-23 05:24
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
支撐機器人競技能力的核心力量,深刻改變著競技機器人的能力邊界。
磁傳感器芯片為機器人運動提供 “精準導航”。在動態平衡系統中,像昆泰芯 KTH71 系列磁傳感器芯片,通過檢測地磁場與運動磁場變化
發表于 08-26 10:02
NVIDIA助力構建人形機器人全身遙操作仿真平臺
清華大學與銀河通用機器人聯合研發,推出了專為人形機器人全身仿真遙操作設計的平臺 OpenWBT_Isaac。該平臺依托 NVIDIA Isaac Sim 與 Isaac Lab 的強大仿真能力構建
工業機器人的特點
的基礎,也是三者的實現終端,智能制造裝備產業包括高檔數控機床、工業機器人、自動化成套生產線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產線、智能農機、3D 打印機等領域。
發表于 07-26 11:22
工業機器人與協作機器人概念不同
在自動化生產的浪潮中,工業機器人與協作機器人逐漸成為企業提升效率、優化產能的得力助手。但它們并非同一概念,在功能、設計與應用場景上有著顯著差異。北京沃華慧通測控有限公司憑借深厚的技術沉淀,為不同需求的企業提供適配的

明遠智睿SSD2351開發板:語音機器人領域的變革力量
在人工智能快速發展的今天,語音機器人逐漸成為人們生活和工作中的得力助手。明遠智睿SSD2351開發板憑借強大性能與豐富功能,為語音機器人的發展注入新動力,成為該領域的變革力量。 SSD2351開發板
發表于 05-28 11:36
盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
路徑。路徑規劃算法會考慮多種因素,如距離最短、避開人流密集區域、優先選擇寬闊通道等,以確保旅客能夠快速、順暢地到達目的地。
實時導航與避障 :在機器人引導旅客的過程中,導航系統會實時監控機器人的運動狀態
發表于 05-10 18:26
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
閱讀心得體會:ROS2機器人視覺與地圖構建技術
通過對本書第7章(ROS2視覺應用)和第8章(ROS2地圖構建)的學習,我對機器人視覺感知和自主導航的核心技術有了更深入的理解。以下是我
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
的知識,還需要對ROS 2的節點通信和數據處理有一定的了解。通過實踐這一部分內容,我掌握了如何在ROS 2中實現二維碼識別,這對于提高機器人的智能性和交互性具有重要意義。
地圖構建:SLAM技術
發表于 04-27 11:42
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
地圖構建→路徑規劃→動態避障)等等
2. 機器人功能開發
相較于ROS入門21講,書中更是詳細書寫了關于機器人的功能開發,并且十分完善,教程詳盡
傳感器數據處理:機器人通常配備多種傳感
發表于 04-27 11:24
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
識別聯調。
進迭時空致力于為智能機器人提供完整全棧優化的RISC-V AI軟硬件解決方案,第一代RISC-V AI CPU芯片K1已完成AI視覺感知、AI語音處理、自動避障、路徑規劃、運動控制等
發表于 04-25 17:59



 工商網監
工商網監
評論