 宏集智能機器人控制系統驅動高效生產
宏集智能機器人控制系統驅動高效生產

概述
近年來,工業自動化領域對智能機器人運動控制系統的需求不斷增長。
常見的工業機器人運動控制方式有兩種:一種是基于工控機和控制卡,功能強大但復雜、布線多、兼容性差;另一種是基于軟PLC,使用個人計算機或嵌入式控制器,具有開放的體系結構、便于開發和維護,支持多種編程語言,不受技術壟斷限制。
宏集的MC系列控制器,結合了先進的CODESYS軟PLC編程環境,為用戶帶來了無與倫比的優勢和靈活性。
控制系統方案設計
宏集機器人控制系統采用一主多從的控制模式,主站采用宏集MC-Prime控制器,從站采用帶EtherCAT接口的伺服驅動器,主站和從站之間采用工業以太網EtherCAT進行數據通訊。
軟件開發平臺在PC端采用CODESYS編程環境,支持基于IEC-61131-3的6種標準編程語言(梯形圖,結構化文本,順序功能圖等),編譯通過后固化到工控機上,直接發送指令控制機器人的運動。機器人控制系統模型如下圖所示.

機器人控制系統架構
方案優勢
1.支持多軸控制和豐富的運動算法
宏集MC-Prime控制器基于CODESYS平臺進行開發,通過圖形化編程界面和豐富的函數庫使得編程變得簡單而直觀。例如,在Delta機器人控制過程中,可以將將三足機器人整體視為一個運動軸組,通過綜合控制機器人的各個關節和動作,實現機器人的整體運動和姿態調整。
宏集MC-Prime控制器集成了CODESYS SoftMotion庫的功能,為CNC和機器人控制帶來了顯著優勢:
? 完整的CNC編程支持
宏集MC-Prime控制器結合CODESYS提供的符合DIN66025標準的3D CNC編輯器和G代碼編程支持。這使得宏集MC控制器能夠在IEC61131-3標準的上位編程環境中實現復雜的CNC控制,簡化了CNC編程流程并提高了效率。
? 內置的CNC功能庫
宏集MC-Prime控制器內置了所有必要的CNC POU庫,包括幾何數據處理、插補和運動學變換等。這些庫使MC控制器成為一個強大的CNC控制平臺,能夠靈活應對不同的CNC應用需求。
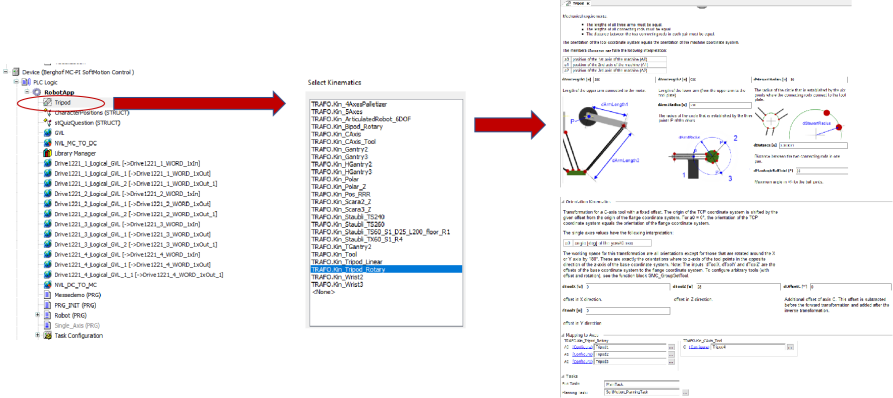
? 軟件集成機器人控制
通過CODESYS SoftMotion Robotics庫,宏集MC-Prime控制器支持軸組的運動學模型設置和機器人路徑規劃。它還支持PLCopen Part4標準功能塊,提供了集成的機器人模型,包括各種龍門機器人、三足機器人和SCARA機器人等。
工程師可以通過調用SoftMotion運動庫中的功能塊,輕松地實現復雜的運動控制算法和邏輯,加快開發周期,提高生產效率。
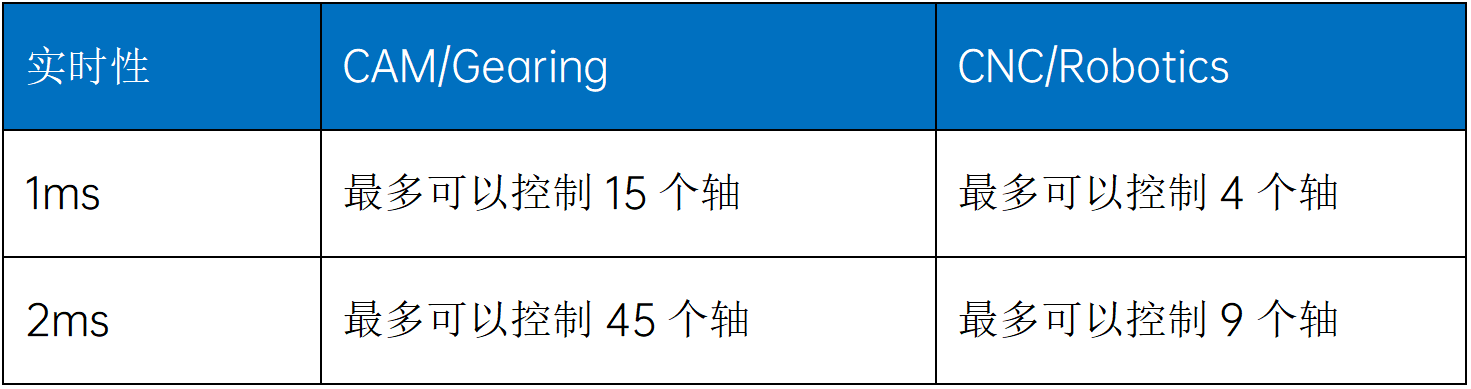
2.高性能實時控制
宏集MC系列控制器配備先進的多核處理器和實時操作系統,可以實現微秒級實時性和毫秒級的運動控制響應。這意味著用戶可以實現高精度、高速度的機器人運動,確保生產過程的穩定性和效率。
宏集MC系列控制器進行多軸控制的軸數和實時性如下:
3.高安全性,SIL3, PLe安全等級
宏集SC安全控制器可以有效地監測和控制機器人運動過程中的安全風險,通過實時監測機器人位置、速度和周圍環境,及時檢測潛在的碰撞或危險情況。例如,通過安裝安全傳感器(如光柵、激光掃描器、安全攝像頭等),安全控制器能夠檢測到人員進入危險區域,并及時停止機器人的運動,從而保護操作員的安全。

在工業生產中,機器人安全是一個重要的法規和標準要求。通過集成宏集SC安全控制器,可以使機器人系統滿足高度嚴格的安全完整性要求(SIL 3)和機械安全性能要求(PL e),這種級別適用于對安全性能和機械可靠性要求都非常高的應用場景,可以幫助企業遵守相關的安全法規和標準,降低潛在的法律風險和責任。
P.S. SIL 分為 SIL 1 到 SIL 4,SIL 數字越高,表示系統在減少危險發生和控制風險方面的性能要求越嚴格;PL 分為 PL a 到 PL e,PL 級別越高,表示系統在執行安全功能時的性能要求越高。
總結
宏集MC系列控制器結合CODESYS編程環境和宏集SC安全控制器,為用戶提供了全方位的智能機器人運動控制解決方案。這種集成提升了生產線靈活性和響應能力,簡化了系統集成和維護。CODESYS開放架構和豐富函數庫為宏集MC控制器提供定制和擴展能力,助力企業應對快速變化的生產需求,提高生產效率和可靠性。
審核編輯 黃宇
-
控制器
+關注
關注
114文章
17787瀏覽量
193082 -
控制系統
+關注
關注
41文章
6952瀏覽量
114084 -
機器人
+關注
關注
213文章
31073瀏覽量
222169 -
plc
+關注
關注
5051文章
14592瀏覽量
486868
發布評論請先 登錄
智能機器人線圈在核心驅動系統中的關鍵作用
機器人內部零配件的生產加工廠從哪找?
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
機器人上下料:驅動現代智能制造的高效引擎
ADI安全產品如何簡化不同機器人控制系統中安全機制的實現

宏集案例 | 精準控制,高效運行—宏集智能控制系統助力SCARA機器人極致性能

輪式移動機器人電機驅動系統的研究與開發
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
基于先進MCU的機器人運動控制系統設計:理論、實踐與前沿技術
高安全低功耗MCU:機器人控制系統的智能化與可靠性提升
雅特力科技助力宇樹科技推動智慧機器人創新應用:深入布局機器人電機控制核心

宏集案例 精準控制,高效運行—宏集智能控制系統助力SCARA機器人極致性能




 工商網監
工商網監
評論