") 外國(guó)牛人造超聲波避障自我充電智能機(jī)器人(圖文)
外國(guó)牛人造超聲波避障自我充電智能機(jī)器人(圖文)



我決定使用Fiji的水瓶來(lái)做我這個(gè)機(jī)器人的主體骨架是因?yàn)镕iji Water是一間很有環(huán)境保護(hù)意識(shí)的公司,同時(shí)Fijibot透過(guò)電池板對(duì)其電池就行充電。再者,我認(rèn)為這個(gè)圓口平盤矩形的形狀加上可以看通透的特性會(huì)讓這個(gè)機(jī)器人看起來(lái)很酷。


在Fiji水瓶的狹窄空間里面進(jìn)行布置的事情,我希望我可以輕易地將Arduino開(kāi)發(fā)板上如傳感器、伺服電機(jī)等所有器件輕易的連接上。所以我從Adafruit購(gòu)買了一個(gè)Proto Shield原型開(kāi)發(fā)板、插針?lè)蛛x引腳和6“的接口跳線。我把這些插針接到proto shield上,同時(shí)用跳線接上需要連接的地方。

Fijibot的主要任務(wù)就是去尋找“食物”,它的“食物”就試試尋找陽(yáng)光,通過(guò)背上的太陽(yáng)能板為自己充電。我用了四個(gè)裝在LED座的左右前上的光敏電阻去幫助它去尋找房間里最猛陽(yáng)光的位置。主程序比較這四個(gè)電阻的數(shù)值,將其指向光線最猛烈的地方。一旦它找到了最適合的地點(diǎn)。,它會(huì)停下來(lái),享受陽(yáng)光大餐。

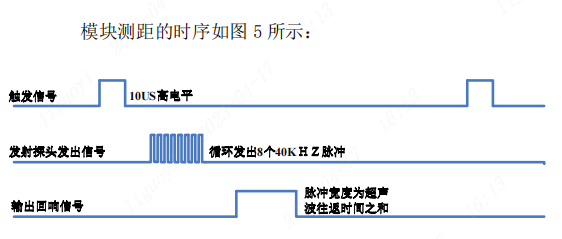
在尋找陽(yáng)光充電的時(shí)候,F(xiàn)ijibot通過(guò)Ping傳感器利用超聲波來(lái)避免碰上任何物體。主程序總是反饋一定范圍內(nèi)的障礙物信息,這個(gè)范圍大概是30英寸。如果發(fā)現(xiàn)物品,F(xiàn)ijibot將會(huì)停下來(lái),通過(guò)一個(gè)標(biāo)準(zhǔn)的平衡視差伺服系統(tǒng)左右探測(cè),以確定一條暢通無(wú)阻的線路。如果前、左、右都有障礙物,它會(huì)退后半秒,然后再?gòu)男聦ふ衣肪€。

Fijibot包含了四個(gè)伺服電機(jī),一個(gè)為每個(gè)后輪服務(wù),一個(gè)旋轉(zhuǎn)其“頭部”(也就是Ping傳感器),一個(gè)去移動(dòng)前軸向左或向右去轉(zhuǎn)彎,我從一個(gè)便宜的RC car取到了這些輪子和前端轉(zhuǎn)彎裝置。在處理前端裝置的時(shí)候我碰到了很大麻煩,我需要添加一些拉簧去保證它能走出一個(gè)相對(duì)直的路線。

為了使這四個(gè)伺服器和Arduino能夠運(yùn)行,我用兩個(gè)單獨(dú)的電源,Arduin工作電壓為9V,四個(gè)伺服器和Ping傳感器是利用4-AA電池組供電,并連到一個(gè)6v的的太陽(yáng)能板來(lái)提供內(nèi)電路供電。由于太陽(yáng)能板和電磁組緊密連接,同時(shí)我在充電電路里用了一個(gè)肖特基二極管。我利用一個(gè)DPST開(kāi)關(guān)來(lái)操作電源,這樣的話我可以可以完全關(guān)閉它。但仍然會(huì)留下太陽(yáng)能電池板連接到4-AA電池組。通過(guò)這個(gè)方式,就算沒(méi)用使用的情況下,它也可以轉(zhuǎn)換電池。
——電子發(fā)燒友網(wǎng)版權(quán)所有,轉(zhuǎn)載請(qǐng)注明出處!
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31074瀏覽量
222189 -
智能機(jī)器人
+關(guān)注
關(guān)注
17文章
920瀏覽量
85780 -
電子制作
+關(guān)注
關(guān)注
143文章
313瀏覽量
152880 -
太陽(yáng)能充電
+關(guān)注
關(guān)注
0文章
54瀏覽量
25827
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
賦能機(jī)器人“慧眼”:TMF8829 48x32 多區(qū) dToF 傳感器,定義避障新高度
在移動(dòng)機(jī)器人領(lǐng)域,避障能力是決定產(chǎn)品智能水平的核心指標(biāo)。無(wú)論是掃地機(jī)器人的精細(xì)化清掃、工業(yè)AGV的復(fù)雜路徑規(guī)劃,還是人形
CW32L012/F030靈眸X1智能小車——超聲波模塊配置
SR04超聲波模塊是一款廣泛應(yīng)用的測(cè)距傳感器,主要用于使用超聲波測(cè)量物體與傳感器之間的距離。它是一個(gè)成本低廉、精度較高且易于使用的傳感器,常用于機(jī)器人、智能家居、無(wú)人機(jī)、汽車防撞系統(tǒng)等
CW32L012小型機(jī)器人控制評(píng)估板活動(dòng) 四足機(jī)器人+智能小車 開(kāi)箱評(píng)測(cè)
、功能測(cè)試
1、打開(kāi)小車電源開(kāi)關(guān),按下KEY2啟動(dòng)小車運(yùn)行,也可以使用紅外遙控器與可以對(duì)小車進(jìn)行控制。
2、進(jìn)行超聲波避障測(cè)試,小車也能自動(dòng)避開(kāi)障礙物,調(diào)整自己的運(yùn)動(dòng)方向。
3、還可以通過(guò)語(yǔ)音指令
發(fā)表于 11-24 23:44
材質(zhì)識(shí)別MEMS超聲波傳感器賦能雙足機(jī)器人自適應(yīng)行走
材質(zhì)識(shí)別MEMS超聲波傳感器通過(guò)聲學(xué)特性分析,為雙足機(jī)器人提供了獨(dú)特的環(huán)境感知維度。其在步態(tài)適應(yīng)性、防滑控制及能耗優(yōu)化方面的作用,已成為復(fù)雜環(huán)境下穩(wěn)健行走的關(guān)鍵使能技術(shù)。隨著MEMS工藝與算法融合的深入,雙足機(jī)器人的環(huán)境適應(yīng)性將

盤點(diǎn)割草機(jī)器人六大避障傳感器
融合演進(jìn),結(jié)合 AI 算法與先進(jìn)控制策略,逐步實(shí)現(xiàn)高精度、低功耗的全自動(dòng)作業(yè)。 ? 超聲波傳感器是割草機(jī)器人常用的避障傳感器之一,通過(guò)發(fā)射超聲波
微型超聲波傳感器:小身軀里的探測(cè)革命,開(kāi)啟智能感知新維度
在智能家居的自動(dòng)窗簾隨光而動(dòng)、無(wú)人機(jī)的避障飛行穿梭樓宇、智能醫(yī)療設(shè)備的精準(zhǔn)監(jiān)測(cè)守護(hù)健康時(shí),一個(gè)不起眼的“微型衛(wèi)士”正悄然改變著科技與生活的交互方式——它就是微型

超聲波測(cè)距換能器:工業(yè)與生活中的測(cè)量利器
的壁厚、內(nèi)部缺陷等。通過(guò)測(cè)量超聲波在物體內(nèi)部的傳播時(shí)間和反射情況,判斷物體的內(nèi)部結(jié)構(gòu)是否正常,及時(shí)發(fā)現(xiàn)潛在的安全隱患,保障工業(yè)設(shè)備的穩(wěn)定運(yùn)行。
智能家居領(lǐng)域
掃地機(jī)器人:掃地機(jī)器人通過(guò)
發(fā)表于 07-02 16:20
超聲波清洗機(jī)是什么,它如何通過(guò)超聲波振動(dòng)來(lái)清洗物品?
超聲波清洗機(jī)的工作原理超聲波清洗機(jī)是一種廣泛用于清洗物品的設(shè)備,它利用超聲波振動(dòng)來(lái)去除污垢和雜質(zhì)。本文將深入探討超聲波清洗機(jī)的工作原理以及它如何通過(guò)

超聲波換能器:原理與多領(lǐng)域應(yīng)用解析
一、引言
在現(xiàn)代科技的發(fā)展進(jìn)程中,超聲波技術(shù)占據(jù)著重要地位,從工業(yè)生產(chǎn)到醫(yī)療診斷,從日常生活到科研探索,超聲波的身影無(wú)處不在。而超聲波換能器作為超聲波技術(shù)的核心部件,如同一位幕后英雄,
發(fā)表于 06-28 15:09
超聲波水下測(cè)距換能器:探索水下世界的“千里眼”
提供重要的數(shù)據(jù)支持。
(三)水下機(jī)器人導(dǎo)航
對(duì)于水下機(jī)器人來(lái)說(shuō),超聲波水下測(cè)距換能器是其導(dǎo)航系統(tǒng)的重要組成部分。它可以實(shí)時(shí)測(cè)量機(jī)器人與周圍障礙物的距離,幫助
發(fā)表于 06-26 10:43
一文讀懂超聲波換能器:原理、應(yīng)用與未來(lái)趨勢(shì)
在科技飛速發(fā)展的今天,超聲波技術(shù)已經(jīng)滲透到我們生活的各個(gè)領(lǐng)域,從日常的清洗設(shè)備到高端的醫(yī)療診斷儀器,從工業(yè)生產(chǎn)中的無(wú)損檢測(cè)到智能交通中的流量監(jiān)測(cè),超聲波換能器都發(fā)揮著不可或缺的作用。那么,超聲
發(fā)表于 06-23 16:51
超聲波清洗的原理是什么?超聲波清洗是如何起作用的?
超聲波清洗是一種利用高頻超聲波振動(dòng)來(lái)清洗物體表面和難以達(dá)到的細(xì)微部分的清潔技術(shù)。其工作原理基于聲波的物理特性和聲波對(duì)液體中微小氣泡的影響。以下是超聲

超聲波頻率和功率對(duì)在線式超聲波清洗的影響如何?
在線式超聲波清洗是一種高效、環(huán)保的清洗方式,在多個(gè)行業(yè)得到了廣泛應(yīng)用。然而,超聲波頻率和功率是影響清洗效果和清洗速度的關(guān)鍵因素。在本文中,我們將從理論和實(shí)踐兩個(gè)方面分析超聲波頻率和功率對(duì)在線式

【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
地圖構(gòu)建→路徑規(guī)劃→動(dòng)態(tài)避障)等等
2. 機(jī)器人功能開(kāi)發(fā)
相較于ROS入門21講,書中更是詳細(xì)書寫了關(guān)于機(jī)器人的功能開(kāi)發(fā),并且十分完善,教程詳盡
傳感器數(shù)據(jù)處理:
發(fā)表于 04-27 11:24



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論