") ROHM開始開發(fā)一種新的機(jī)器人移動技術(shù)“NoMaDbot”
ROHM開始開發(fā)一種新的機(jī)器人移動技術(shù)“NoMaDbot”

在制造和物流行業(yè),AGV(自動搬運(yùn)機(jī)器人)和 AMR(自主移動機(jī)器人)的應(yīng)用越來越廣泛。由于勞動力短缺問題而引發(fā)擔(dān)憂的同時(shí),能夠在工廠和倉庫與人協(xié)同作業(yè)的AGV和AMR正在逐漸成為行業(yè)新寵。
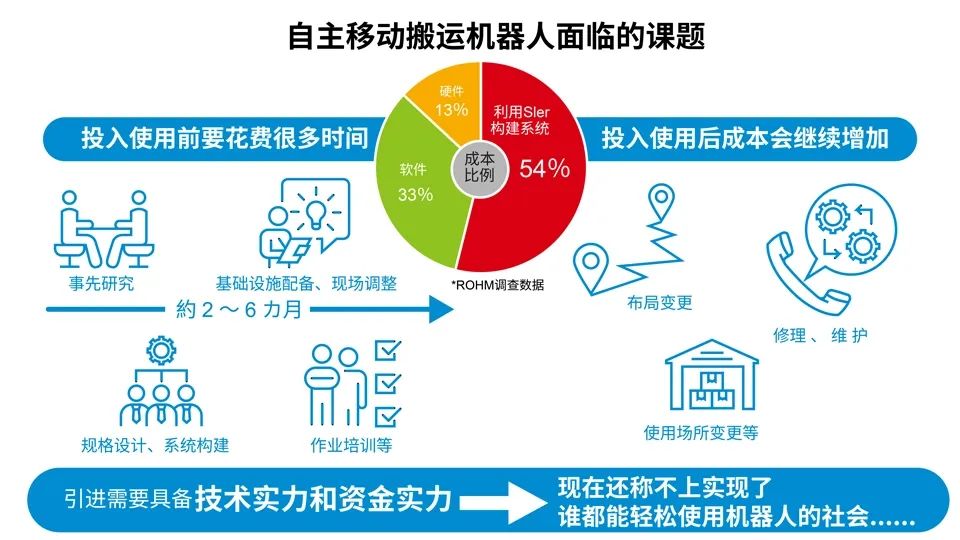
然而,AGV需要將磁條或二維碼等導(dǎo)航裝置貼在地面上來鋪設(shè)行進(jìn)路線。另外,AMR在購買之后也不能立即投入使用。在投入實(shí)際使用之前,需要規(guī)劃行進(jìn)路線和創(chuàng)建地圖,需要耗費(fèi)大量的時(shí)間和成本才能實(shí)際運(yùn)行系統(tǒng),風(fēng)險(xiǎn)非常大。
此外,再考慮到發(fā)生故障時(shí)的緊急響應(yīng)和維護(hù),實(shí)施的門檻非常高,這是不爭的事實(shí)。鑒于這些原因,可能很多人認(rèn)為讓AGV或AMR做的工作內(nèi)容不值得花費(fèi)那么大的引進(jìn)成本。
對此,ROHM正在秘密開發(fā)一種新的搬運(yùn)機(jī)器人移動技術(shù),針對那些不足以由AGV和AMR來完成的任務(wù),利用該技術(shù)將能夠以很低的成本立即投入使用。這是使未來社會更加便捷的、基于全新理念開發(fā)的機(jī)器人解決方案。在本文中,將向大家稍微劇透一下NoMaDbot(無地圖移動機(jī)器人)這一新型移動技術(shù)的秘密。
1
AGV和AMR的普及所暴露出來的現(xiàn)場問題
在智能化轉(zhuǎn)型的工業(yè)設(shè)施、工廠和物流等工作現(xiàn)場,AGV和AMR等搬運(yùn)機(jī)器人的身影越來越多,并且其應(yīng)用范圍也越來越廣。然而,隨著它們的普及,各種問題也隨之暴露出來。
尤其是AMR,由于其性能高,也能為改善工作環(huán)境做出巨大貢獻(xiàn),因而如今仍然備受關(guān)注。另一方面,鑒于“引進(jìn)成本高”、“需要專業(yè)的SIer(系統(tǒng)集成商,構(gòu)建系統(tǒng)的工程師)”、“到實(shí)際投入使用需要很長的時(shí)間”以及“頻繁卡頓”等原因,似乎很多人在猶豫是否引進(jìn)。
事實(shí)上,工作現(xiàn)場有很多簡單的任務(wù)并不需要高性能的機(jī)器人。
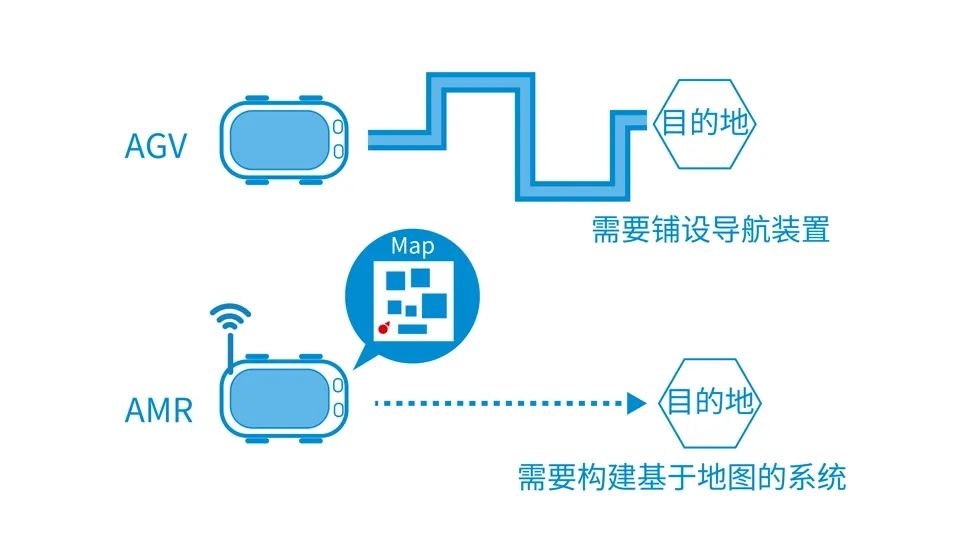
例如,針對“將某物從A處運(yùn)到B處”的需求,如果使用傳統(tǒng)的AGV,就需要鋪設(shè)磁條等導(dǎo)航裝置。如果使用AMR,情況則更為復(fù)雜。AMR使用的是一種稱為SLAM(Simultaneous Localization and Mapping)的技術(shù),可以在檢測自我位置的同時(shí)創(chuàng)建地圖。
要想引入SLAM,需要由稱為“SIer”的專業(yè)工程師設(shè)計(jì)出適合設(shè)備的規(guī)格并規(guī)劃行進(jìn)路線,而且只有在創(chuàng)建了地圖之后才能實(shí)際投入使用。因此,購買后可能需要耗費(fèi)幾個(gè)月的時(shí)間才能真正實(shí)際運(yùn)行。另外,如果設(shè)備的布局發(fā)生了變化,這些流程可能需要重新再來一遍。
在路線復(fù)雜、對精密性和速度要求很高的設(shè)備、以及布局在很長時(shí)間內(nèi)不會改變的環(huán)境中,使用像AMR這樣的高性能搬運(yùn)機(jī)器人可以發(fā)揮非常大的作用,但是在諸如“希望將不用的東西或缺陷產(chǎn)品運(yùn)到廢棄物堆場”或“希望將某物從A交給B”這樣的簡單任務(wù),并不需要太高級的性能和協(xié)作功能。
在物流倉庫、超市內(nèi)部和活動會場這類“布局會頻繁變化”的環(huán)境中,花費(fèi)很長時(shí)間構(gòu)建基于地圖的系統(tǒng),可能會導(dǎo)致對搬運(yùn)機(jī)器人的采用猶豫不決。
“只要能搬運(yùn)”就行,難道就沒有更簡單、性價(jià)比更高的搬運(yùn)機(jī)器人嗎?
為了滿足客戶的這種需求,ROHM開始開發(fā)一種新的機(jī)器人移動技術(shù)“NoMaDbot”。
2
生物無需地圖即可到達(dá)目的地!
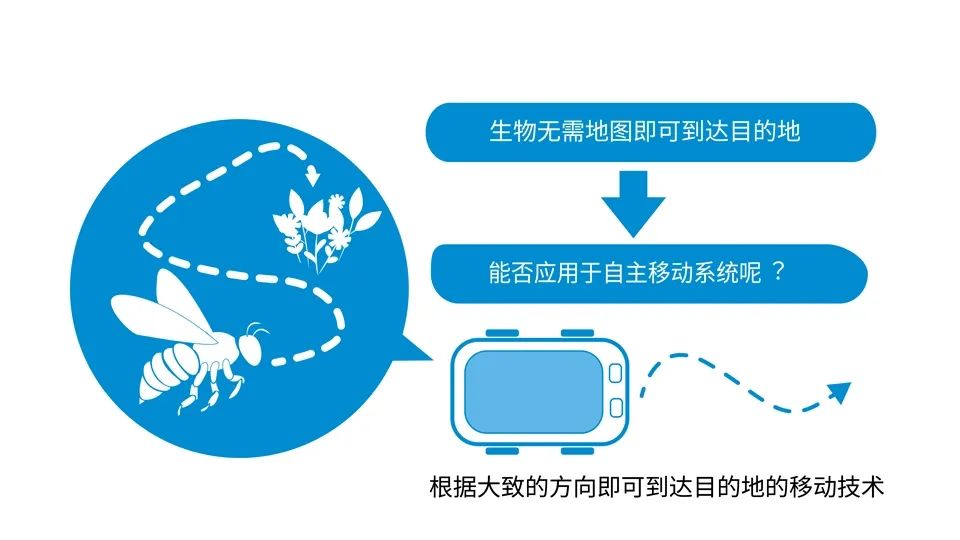
“NoMaDbot”的開發(fā)始于“生物無需地圖即可到達(dá)目的地”的逆轉(zhuǎn)思維。
例如,昆蟲和動物是根據(jù)大致的方向、大致的距離以及對當(dāng)時(shí)情況的判斷來尋找目的地的。人類也一樣。雖然去很遠(yuǎn)的地方時(shí)有時(shí)會依賴地圖或?qū)Ш剑蠖鄶?shù)人去家附近的超市購物時(shí)應(yīng)該不會隨身攜帶地圖或開導(dǎo)航的。
即使是沒去過的超市,只要知道大概的方向和距離,應(yīng)該就能到達(dá)那里。另外,即使道路因施工封閉,或者有停放的汽車等障礙物,也可以避讓或繞行,會根據(jù)當(dāng)時(shí)的情況靈活應(yīng)對,而不會半途停下。
那么是否有可能給搬運(yùn)機(jī)器人配備類似于這種生物的、能夠隨機(jī)應(yīng)變的自主移動技術(shù)呢?
對此,“NoMaDbot”開發(fā)團(tuán)隊(duì)重點(diǎn)關(guān)注的是如何推測目的地的大致方向,以及如何在去往目的地的途中檢測到并避讓障礙物。
3
NoMaDbot的核心技術(shù)① “方位推測”
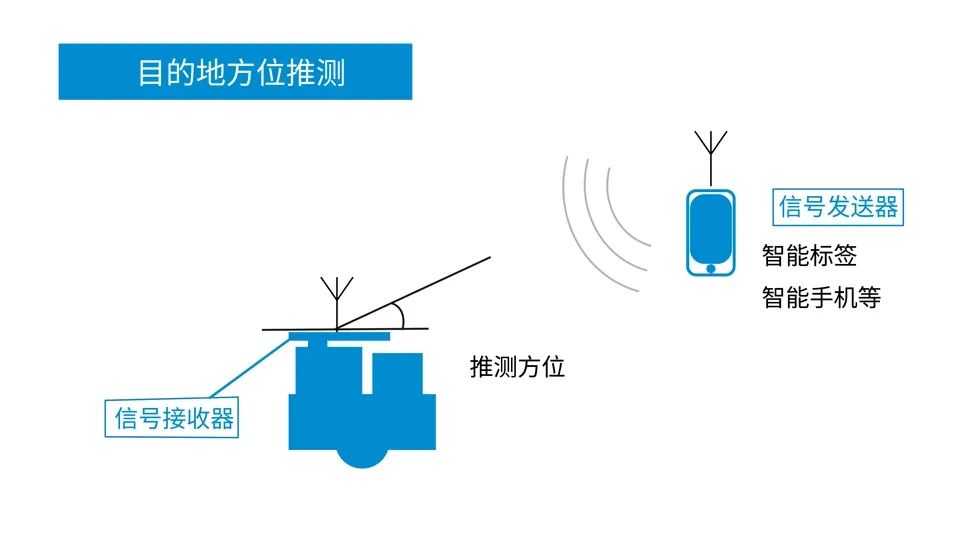
NoMaDbot的名稱源自“No Map Driving robot”。即“不使用地圖的自主移動技術(shù)”。其核心技術(shù)之一是用來確定目的地方向的“方位推測”技術(shù)。
對于NoMaDbot而言,充當(dāng)信息發(fā)送器的智能標(biāo)簽(未來可能是智能手機(jī)等)就是目的地。NoMaDbot需要檢測出從信息發(fā)送器發(fā)出的無線電波并推測其方位。雖然只能向目的地——智能標(biāo)簽行進(jìn),但這對于簡單的搬運(yùn)用途來說已經(jīng)足夠了。
另外,雖然無法像AMR那樣對復(fù)雜的路線進(jìn)行編程,但通過將多個(gè)智能標(biāo)簽組合起來并按順序切換,也可以執(zhí)行“將貨物從A處運(yùn)送到B處,然后去往C處”等工作。
4
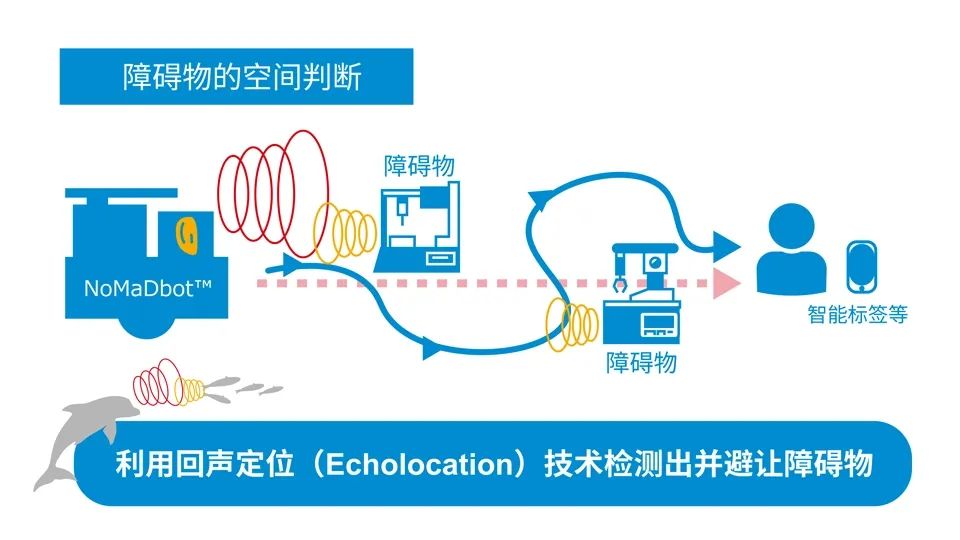
NoMaDbot的核心技術(shù)② “回聲定位”
另一項(xiàng)核心技術(shù)是用來避讓沿途障礙物的“回聲定位(Echolocation)”技術(shù)。
回聲定位是利用發(fā)射出去的超聲波和反射回來的回聲來檢測和確定物體的距離、方向、大小等的技術(shù)。這是受到海豚、鯨魚和蝙蝠等的空間判斷能力啟發(fā)而開發(fā)出來的技術(shù)。通過在移動算法中使用回聲定位技術(shù),NoMaDbot可以檢測出并避讓障礙物。
5
“方位推測”+“回聲定位”=“無需地圖”
通過融合“方位推測”和“回聲定位”這兩項(xiàng)核心技術(shù),實(shí)現(xiàn)了“不使用地圖的自主移動技術(shù)”的,是來自日本的全球首創(chuàng)全新機(jī)器人自主移動技術(shù)“NoMaDbot”。
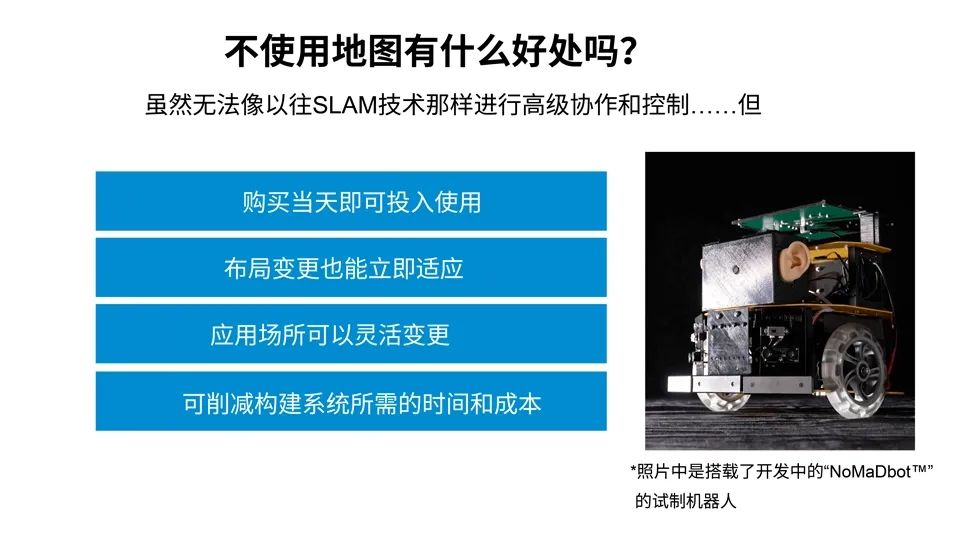
雖然不可能像使用傳統(tǒng)技術(shù)“SLAM”的AMR那樣進(jìn)行高級協(xié)作和控制,但足以完成“運(yùn)送貨物”這類的任務(wù),而且其應(yīng)用場景應(yīng)該非常多。更重要的是,采用了這種新的移動技術(shù)之后,將不再需要由SIer構(gòu)建基于地圖的系統(tǒng),從購買之日起就可以立即投入使用。當(dāng)然,也不會受到設(shè)備布局變更或工作場所變更的影響。
*截至2023年12月 ROHM調(diào)查數(shù)據(jù)
6
“無地圖”機(jī)器人移動技術(shù)的更多優(yōu)勢
“不需要地圖”所帶來的好處不僅僅是降低成本和投入使用的速度。由于無需使用地圖,所以也不會因?yàn)楦鷣G地圖上的位置而卡頓。也就是說,這是一種抗意外風(fēng)險(xiǎn)能力超強(qiáng)的自主移動系統(tǒng)。
另外,NoMaDbot的移動算法并不是針對地圖上的固定地點(diǎn),而是針對智能標(biāo)簽等信息發(fā)送器,因此即使在行進(jìn)途中目的地發(fā)生移動,只要在無線電波能夠到達(dá)的范圍內(nèi),就能夠準(zhǔn)確到達(dá)目的地。
除此之外,還可以執(zhí)行僅使用基于以往SLAM的移動技術(shù)難以完成的任務(wù),例如“實(shí)時(shí)尾隨不斷改變位置的A先生并將貨物送達(dá)”或“跟隨A先生搬運(yùn)貨物”。
7
ROHM開始開發(fā)自主移動技術(shù)的原因
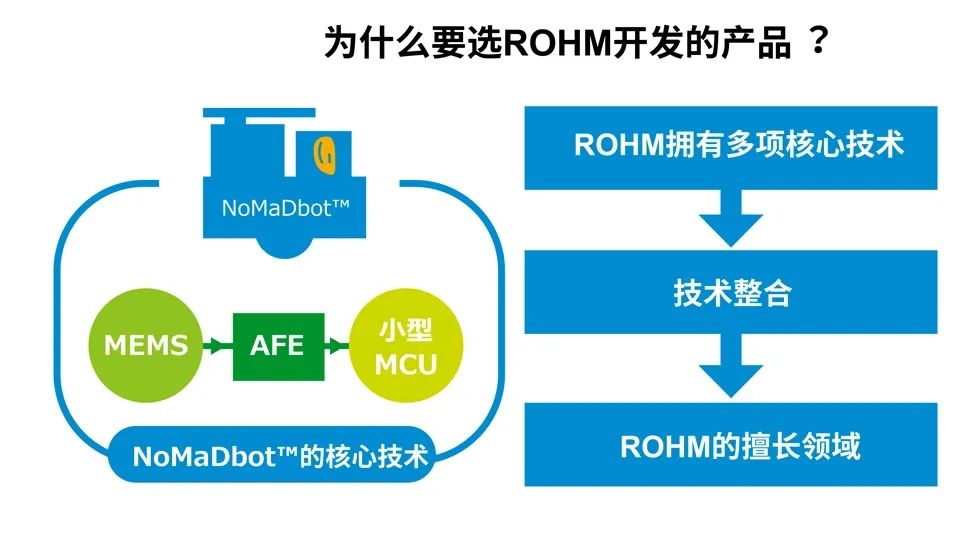
那么,半導(dǎo)體制造商ROHM為什么要開始開發(fā)自主移動技術(shù)呢?這是因?yàn)镽OHM致力于“實(shí)現(xiàn)誰都能使用自主移動機(jī)器人的社會”的目標(biāo)。
更重要的原因是,ROHM除了全球首創(chuàng)的自主移動技術(shù)“NoMaDbot”之外,還擁有其核心技術(shù)中的核心——MEMS、AFE、小型MCU等多項(xiàng)關(guān)鍵技術(shù),通過整合這些技術(shù),可以創(chuàng)造出新的解決方案,這正是ROHM的優(yōu)勢領(lǐng)域。
8
NoMaDbot的應(yīng)用領(lǐng)域
NoMaDbot不否定AGV和AMR,也不與它們競爭。
對于希望確定行進(jìn)路線的應(yīng)用,可以使用AGV;對于希望完全自動化的應(yīng)用,可以使用AMR;對于希望便宜且簡單地實(shí)現(xiàn)自動化的應(yīng)用,可以使用NoMaDbot。這三種產(chǎn)品可以分棲共存。
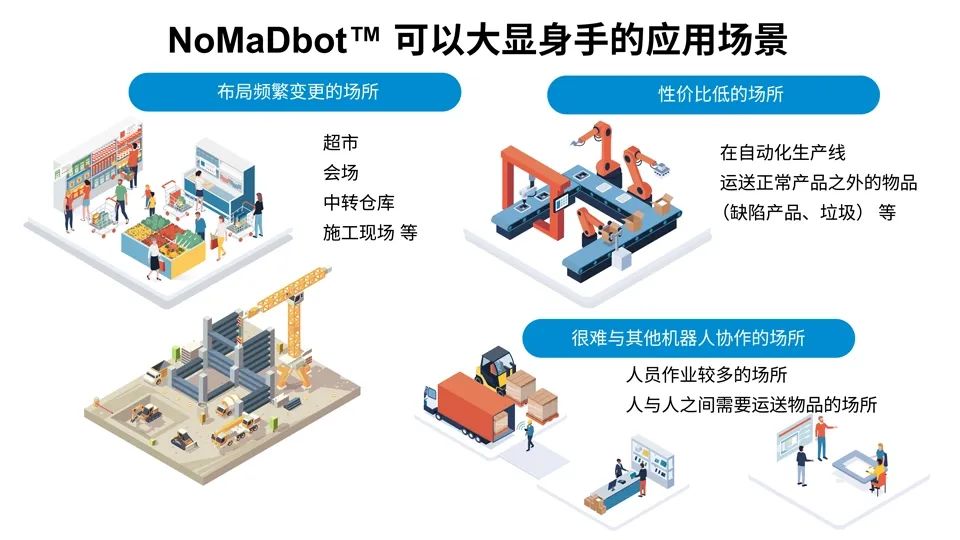
例如,NoMaDbot適用于布局會根據(jù)時(shí)間或季節(jié)而頻繁變化的中轉(zhuǎn)倉庫等場所、超市、活動會場和施工現(xiàn)場等需要人與人之間運(yùn)送物品的場所;工廠等正常產(chǎn)品之外的缺陷產(chǎn)品和垃圾等的運(yùn)送作業(yè)。如果只是運(yùn)送貨物,NoMaDbot比AGV或AMR更簡單易用,在便捷性方面的優(yōu)勢非常大。這就是NoMaDbot。
另外,隨著未來的進(jìn)一步開發(fā),預(yù)計(jì)NoMaDbot將能在更廣泛的應(yīng)用和環(huán)境中更加便利地使用,比如尾隨智能標(biāo)簽攜帶者的跟隨行進(jìn)模式、以及將智能手機(jī)與應(yīng)用程序聯(lián)動等應(yīng)用。

9
NoMaDbot對未來工業(yè)社會的展望
NoMaDbot旨在創(chuàng)造“誰都能使用自主移動機(jī)器人的社會”。
在不需要高性能機(jī)器人的應(yīng)用場景中,使用更簡單、成本更低、更易用的搬運(yùn)機(jī)器人,可以提高生產(chǎn)效率,有助于促進(jìn)制造和物流的自動化。
另外,通過與傳感器融合概念相結(jié)合,NoMaDbot還具有更大的發(fā)展?jié)摿ΑD壳皟H針對陸地應(yīng)用,未來ROHM還會開發(fā)出能夠在天空、海洋等特殊環(huán)境下工作的產(chǎn)品,讓我們拭目以待。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31073瀏覽量
222163 -
AMR
+關(guān)注
關(guān)注
3文章
477瀏覽量
32146 -
AGV
+關(guān)注
關(guān)注
28文章
1554瀏覽量
43662 -
羅姆半導(dǎo)體
+關(guān)注
關(guān)注
0文章
71瀏覽量
15063
原文標(biāo)題:干貨 | NoMaDbot?就像有生命一樣?ROHM挑戰(zhàn)“不需要地圖”的機(jī)器人移動新技術(shù)
文章出處:【微信號:羅姆半導(dǎo)體集團(tuán),微信公眾號:羅姆半導(dǎo)體集團(tuán)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
探索RISC-V在機(jī)器人領(lǐng)域的潛力
高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動控制方案
強(qiáng)生醫(yī)療科技攜手NVIDIA推進(jìn)手術(shù)機(jī)器人開發(fā)
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
小蘿卜機(jī)器人的故事
什么是機(jī)器人?追溯機(jī)器人技術(shù)的演變和未來




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論