") 4525DO-DS3AI002DS空速模塊的誤差分析及結(jié)構(gòu)分析
4525DO-DS3AI002DS空速模塊的誤差分析及結(jié)構(gòu)分析

4525DO-DS3AI002DS空速模塊,也被稱為皮托管、總壓管或總-靜壓管,是一個(gè)專門設(shè)計(jì)來(lái)感受氣流的總壓(全壓)和靜壓,并將這些壓力信號(hào)傳遞給大氣數(shù)據(jù)計(jì)算機(jī)和飛行儀表的裝置。這種航空裝置在測(cè)量飛行速度方面發(fā)揮著關(guān)鍵作用,是精確掌握飛行器速度的重要手段。同時(shí),它還能實(shí)現(xiàn)其他多種功能,例如通過(guò)在空速管上安裝傳感器來(lái)擴(kuò)展其功能。
 4525DO-DS3AI002DS
4525DO-DS3AI002DS一、空速管內(nèi)部結(jié)構(gòu)
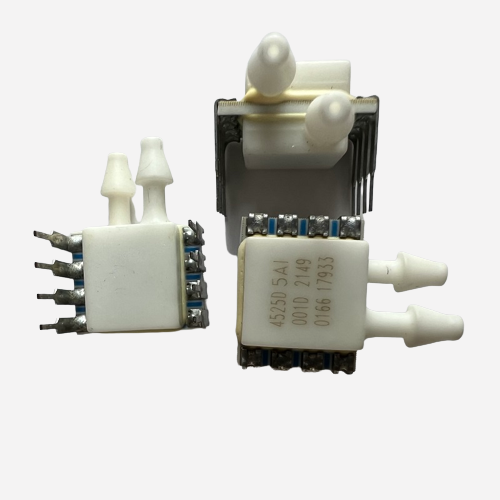
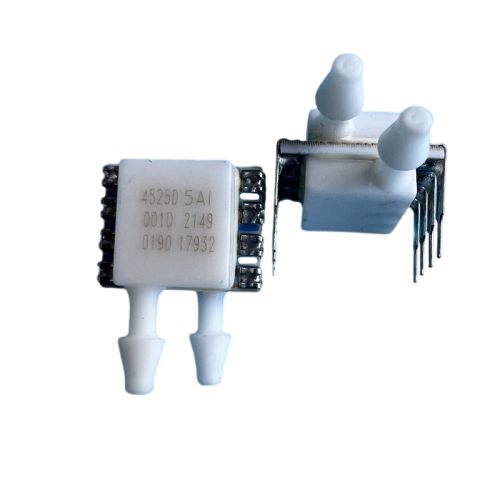
空速管由兩個(gè)主要部分構(gòu)成:內(nèi)圓管作為總壓管,用于測(cè)量氣流的總壓;外套管作為靜壓管,用于測(cè)量氣流的靜壓。其工作原理是,當(dāng)飛機(jī)向前飛行時(shí),氣流進(jìn)入空速管。在管子末端的4525DO-DS3AI002DS傳感器會(huì)感受到氣流的沖擊力量,即動(dòng)壓。飛機(jī)的飛行速度越快,動(dòng)壓就越大。通過(guò)比較動(dòng)壓和靜壓,我們可以計(jì)算出氣流的速度,進(jìn)而得知飛機(jī)的飛行速度。空速管的側(cè)方開(kāi)口專門用于測(cè)量靜壓,當(dāng)氣流與空速管軸線平行時(shí),其內(nèi)部壓強(qiáng)即為周圍大氣的靜壓。
二、空速計(jì)周邊靜壓分布 無(wú)人機(jī)在空氣中飛行時(shí),由于機(jī)體的擾動(dòng),其周圍會(huì)形成一個(gè)繞流場(chǎng)。4525DO-DS3AI002DS空速計(jì)所探測(cè)到的氣流靜壓實(shí)際上是飛機(jī)繞流場(chǎng)中的靜壓,而非空氣未被機(jī)體擾動(dòng)前的大氣靜壓。這兩者之間的差異即為空速管的靜壓探測(cè)誤差。除了空速管本身的設(shè)計(jì)因素,這種誤差主要受到空速管在流場(chǎng)中的位置影響。空速管通常安裝在機(jī)頭前端,對(duì)于進(jìn)氣道不在機(jī)頭的飛機(jī),由于氣流受到機(jī)體的阻滯,機(jī)頭前方的空氣壓力會(huì)升高,從而產(chǎn)生位置誤差。這種誤差的大小受到多種因素的影響。
 4525DO-DS3AI002DS
4525DO-DS3AI002DS三、空速管誤差分析
靜壓孔距機(jī)頭的距離與誤差大小成反比。距離越遠(yuǎn),被探測(cè)處的空氣受機(jī)體的擾動(dòng)影響就越小,探測(cè)到的靜壓越接近真實(shí)的大氣靜壓,因此誤差越小。
無(wú)人機(jī)機(jī)身的頭部形狀和機(jī)身最大直徑也會(huì)影響誤差。在靜壓孔位置確定后,機(jī)身最大直徑越大,對(duì)誤差的影響也越大。 由此可見(jiàn),4525DO-DS3AI002DS空速計(jì)的位置誤差是其靜壓孔處受到的擾動(dòng)壓力值,這種誤差從機(jī)理上來(lái)說(shuō)是不可避免的。為了滿足實(shí)際使用中對(duì)空速管探測(cè)靜壓精度的要求,必須采取相應(yīng)措施對(duì)位置誤差進(jìn)行修正。
-
傳感器
+關(guān)注
關(guān)注
2576文章
55041瀏覽量
791345 -
測(cè)量
+關(guān)注
關(guān)注
10文章
5636瀏覽量
116730
發(fā)布評(píng)論請(qǐng)先 登錄
TE 85-500A-4C壓力傳感器:精準(zhǔn)可靠之選
無(wú)人機(jī)為啥都用 MS4525DO 空速計(jì)?

深度解析DS2775/DS2776/DS2777/DS2778:集燃料計(jì)量、保護(hù)與認(rèn)證于一體的芯片
睿遠(yuǎn)研究院丨IO-Link規(guī)范解讀(十四):DS模塊詳解
普源示波器DS70000系列頻譜分析功能高性能射頻測(cè)試實(shí)測(cè)
普源DS1102E示波器在SATA信號(hào)分析中的應(yīng)用
HarmonyOS AI輔助編程工具(CodeGenie)報(bào)錯(cuò)分析
用IS8000軟件和WT5000功率分析儀的DS波形數(shù)據(jù)流功能分析形數(shù)據(jù)
MS4525DO-TP3AJ030APF壓力傳感器測(cè)量氣壓高度

普源DS2000系列示波器FFT頻譜分析功能設(shè)置指南
長(zhǎng)沙醫(yī)學(xué)院選購(gòu)我司HS-STA-002同步熱分析儀

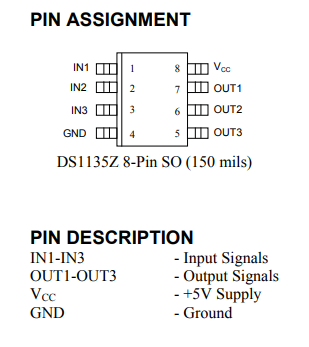
DS1135 3合1、高速硅延遲線技術(shù)手冊(cè)
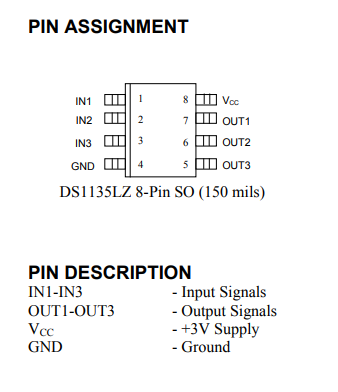
DS1135L 3V、3合1、高速硅延遲線技術(shù)手冊(cè)
S32DS-PA v2.1激活失敗的原因?
DS1402-RP3 adi




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論